

运算放大器的功耗性能权衡
描述
高性能和低功耗:这一要求即将实现 在越来越多的应用中,特别是在移动、电池供电方面 设备。特别是在物联网、工业 4.0 和数字化时代,这些 手持设备使日常生活的许多方面都更轻松。在应用程序中也是如此 从移动生命体征监测到机器和系统监测 在工业环境中。对更高性能和最长电池寿命的需求 也出现在最终用户产品中,例如智能手机和可穿戴设备。
可用于供电的电池能量有限,因此需要高效 在活动模式下具有最小电流的组件,可最大限度地延长设备运行时间。 或者,较低的功耗允许实现相同的电池 使用低容量电池的使用寿命,减小尺寸、重量和成本。温度 管理也不应被忽视。在这里,更高效的组件 发挥积极作用。可以减少占用空间的冷却管理 因为产生的热量较低。有广泛的 提供低功耗甚至超低功耗 (ULP) 组件。本文 特别关注低功耗运算放大器。
功耗和性能之间的权衡
通常存在与操作功耗相关的权衡 在选择合适的放大器时需要考虑的放大器。
较低的功耗通常也意味着较低的带宽。但是,这也取决于 关于给定的放大器架构和稳定性要求。越高 寄生电容和电感,通常带宽越低。因此 例如,跨阻放大器(电流反馈放大器)提供 带宽相对较高,但精度较低。通过一些技巧, 带宽功率比可以提高。
例如,增益带宽(GBW)通常如下:

Gm是跨导,或输出电流与 输入电压(I外/V在),C为内部补偿电容。
增加带宽的经典方法是增加偏置电流,这将 增加 Gm以更多的功耗为代价。但我们不想做 用于降低功率。
通常,补偿电容应设置主极点,因此理想情况下 负载电容完全不会影响带宽。
较低的电容通常产生较高的带宽,然后受到限制 受放大器的物理特性影响,但也会损害稳定性, 而它通常会在低噪声增益下提高稳定性。不过 实际上,我们无法在较低的噪声增益下驱动那么大的纯容性负载。
使用低功耗运算放大器的另一个权衡是通常更高的电压 噪声。但是,折合到输入端的电压噪声通常是放大器的主要因素。 对总输出宽带噪声的贡献,但它可能由 电阻噪声。总噪声通常由 输入级(例如,集电极具有散粒噪声,漏极具有热效应 噪音)。1/f 噪声(闪烁噪声)因架构和 是由组件材料的特殊缺陷等引起的。 因此,它通常由组件尺寸决定。相比之下,电流 在较低的功率水平下,噪声通常较低。然而,特别是在双极性放大器中, 它也不应被忽视。在1/f区域,1/f电流噪声可以是 放大器输出端总1/f噪声的主要贡献因素。其他权衡 在于失真性能和漂移值。通常使用低功耗运算放大器 表现出更高的总谐波失真(THD),但与电流噪声一样, 双极性放大器中的输入偏置和失调电流随减小而减小 电源电流。运算放大器的另一个重要特性是 失调电压。它通常通过输入侧的适应来影响 组件,因此不会在 低功耗,因此VOS和VOS漂移在功率范围内是恒定的。外部电路 和反馈电阻(RF) 也会影响操作的性能 放大器。较高的电阻值会降低动态功率和谐波 失真,但它们会增加输出噪声和与 偏置电流。
为了进一步降低功耗,许多设备通常具有 待机或睡眠功能。这样可以停用关键设备功能 不使用时,仅在需要时重新激活。唤醒时间为 对于低功率放大器,通常更长。前面描述的权衡是 总结见表1。
| 功耗 ↓ | 反馈电阻(RF) ↑ | |
| 积极作用 |
电流噪声 ↓ 偏置电流漂移 ↓ 失调电流漂移 ↓ |
动态功率 ↓ 失真 (THD) @ 高频 ↓ |
| 负面影响 |
带宽 ↓ 电压噪声 ↑ 失真 (THD) @ 高频 ↑ 唤醒时间 ↑ 驱动器功率 ↓ |
输出噪声 ↑ 对偏置电流的影响 ↑ |
|
中性效果 |
失调电压漂移 |
ADA4945-1双极性差分放大器在这些特性之间提供了很好的折衷方案。由于其低直流偏移、直流失调漂移和出色的出色 动态性能,非常适合众多高分辨率、功能强大的数据 采集和信号处理应用,其中需要驱动器 ADC,如图1所示,使用ADA4945-1驱动AD4022 ADC。包括 多种功耗模式,您可以优化性能与功耗权衡 特定的转换器。例如,其全功率模式应与AD4020良好配对,然后您可以为较低样本切换到低功耗模式 AD4021或AD4022的速率。
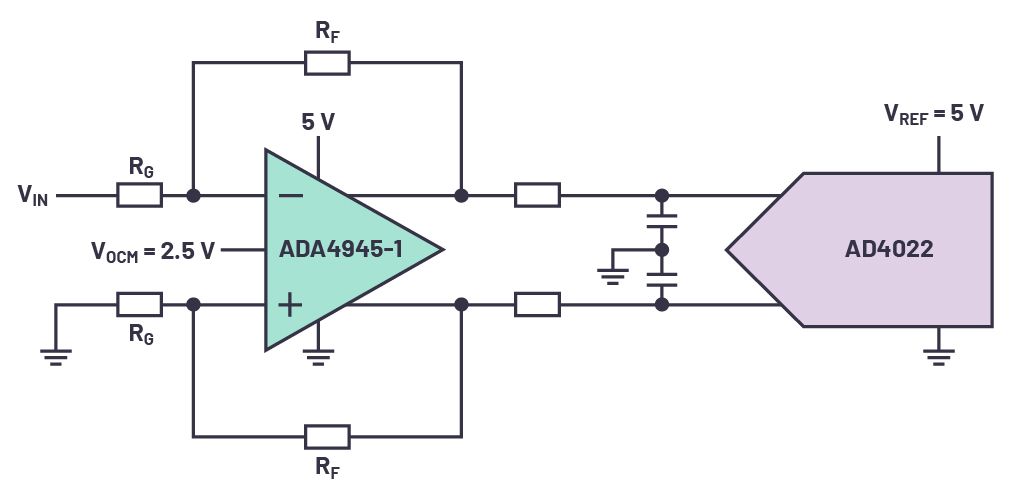
图1.高分辨率数据采集系统的简化信号链示例。
审核编辑:郭婷
-
运算放大器功耗与性能的权衡之术!2023-09-12 1314
-
运算放大器功耗与性能的权衡之术2023-09-04 1551
-
高性能、低功耗运算放大器的权衡因素归纳和汇总2021-11-10 2257
-
运算放大器功耗与性能的权衡2021-09-22 6349
-
输入失调电压对运算放大器性能的影响是什么?2021-06-17 2591
-
运算放大器功耗大2017-08-21 2852
-
运算放大器2014-04-23 4806
-
运算放大器,运算放大器是什么意思2010-03-09 4063
-
使运算放大器的噪声性能与ADC相匹配2009-11-21 8418
-
高性能运算放大器2009-03-20 654
全部0条评论

快来发表一下你的评论吧 !
