

玩转OpenHarmony PID:教你打造两轮平衡车
描述
点击蓝字 ╳ 关注我们

王维平
OpenHarmony知识体系工作组
简介




硬件配置资源
原理概括
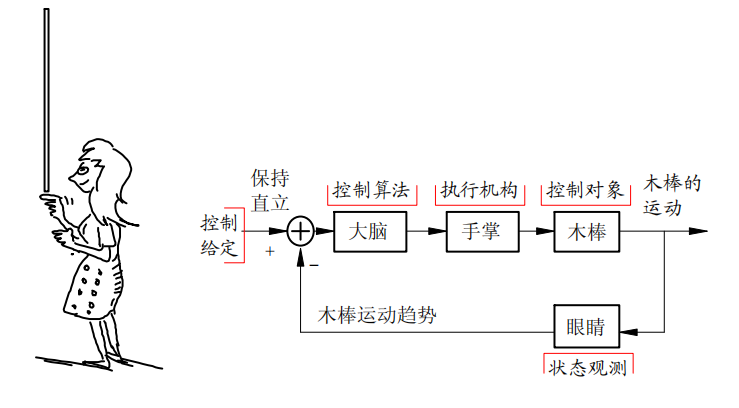

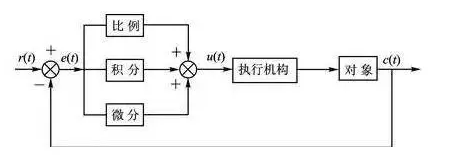
PID算法介绍

两步搭建样例工程


关键算法讲解


float g_middleAngle = 1.0;//平衡角度
float g_kpBalance = -85800.0;
float g_kdBalance = -400;
static int ControlBalance(float angle, short gyro)
{
int outpwm = 0;
float angleBias = 0.0;
float gyroBias = 0.0;
float tempAngle = 0.0;
float tempGyro = 0.0;
tempAngle = 0 - angle;//极性控制
tempGyro = 0 - gyro;
angleBias = g_middleAngle - tempAngle;
gyroBias = 0 - tempGyro;
outpwm = (g_kpBalance / 100 * angleBias + g_kdBalance
* gyroBias / 100);
return outpwm;
}float g_kpSpeed = 95800.0;
float g_kiSpeed = 200;
static int ControlSpeed(long int left, long int right)
{
int outpwm = 0;
int speedBias = 0;
int speedBiasLowpass = 0;
static int speed_i = 0;
float a = 0.68;
static int speedBiasLast = 0;
speedBias = 0 - left - right;
speedBiasLowpass = (1 - a) * speedBias
+ a * speedBiasLast;
speedBiasLast = speedBiasLowpass;
speed_i += speedBiasLowpass;
speed_i = limit_data(speed_i, SPEED_H, SPEED_L);
outpwm = (g_kpSpeed * speedBiasLowpass / 100 +
gkiSpeed * speed_i / 100);
return outpwm;
}static int ControlTurn(short gyro)
{
int outpwm;
outpwm = g_kpTurn * gyro;
return outpwm;
}总结
相关链接
https://gitee.com/openharmony/docs/blob/master/zh-cn/release-notes/OpenHarmony-v3.2-beta1.md
https://gitee.com/openharmony-sig/vendor_oh_fun
https://gitee.com/bearpi/bearpi-hm_nano/tree/master/applications/BearPi/BearPi-HM_Nano/docs/quick-start
https://gitee.com/openharmony-sig/knowledge/blob/master/docs/co-construct_demos/README_zh.md
https://growing.openharmony.cn/mainPlay/learnPathMaps?id=19
https://gitee.com/openharmony-sig/knowledge_demo_smart_home
原文标题:玩转OpenHarmony PID:教你打造两轮平衡车
文章出处:【微信公众号:OpenAtom OpenHarmony】欢迎添加关注!文章转载请注明出处。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
- 相关推荐
- 热点推荐
- 鸿蒙
- OpenHarmony
-
两轮自平衡电动车及其电机控制器设计2025-06-09 476
-
两轮平衡小车2014-07-20 5030
-
两轮平衡车独轮车赛格威思维翼体感车2014-09-27 6165
-
使用MSP432制作两轮自平衡车2015-05-10 16577
-
【FireBLE申请】两轮平衡车2015-07-19 2445
-
基于stm32的载人两轮平衡车控制系统设计2016-07-23 5676
-
STM32步进电机控制两轮平衡车做PID控制时电机出现失步2019-02-12 5384
-
请问两轮平衡车器件在哪买有推荐吗2019-02-20 1792
-
请问怎样去设计两轮自平衡自动车系统?2021-04-19 2759
-
怎样通过手机蓝牙APP去控制两轮自平衡车呢2021-11-11 4099
-
基于ARM-STM32的两轮自平衡小车设计2021-11-30 2109
-
玩转OpenHarmony PID:教你打造两轮平衡车2022-12-16 1878
-
两轮平衡车设计资料2012-09-23 9901
-
使用PID设计两轮智能平衡小车的资料合集2021-03-24 1329
-
【精选好文】玩转OpenHarmony PID:教你打造两轮平衡车2022-12-27 2263
全部0条评论

快来发表一下你的评论吧 !
