

3D检测算法的smoke PyTorch 实现
嵌入式技术
描述
【GiantPandaCV导语】修改开源的 3D 检测算法,使用了 pytorch 自带的 DConv,省去 linux 下编译 DConv 的 cuda 代码,可以直接在 window 下训练和测试。在源码基础上增加了 finetune 和 resume 等功能,并提供了重新训练的模型。
代码:https://github.com/Huangdebo/SMOKE-window
[x] 模型效果
1 网络结构
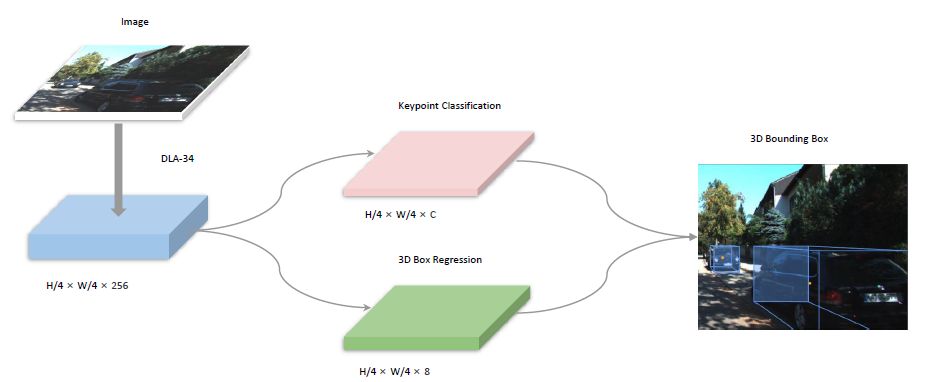
smoke 的网络机构比较简单粗暴,一个 DLA 直接出 w/4, h/4 的特征图,然后分成两路:(1) 关键点检测,用以得出每个类别的目标的 3D 中心点在 2D 图像中的投影(2) 3D 信息的回归, depth_offset(1), keypoint_offset(2), dimension_offset(3), orientation(2),共 8 个channel。
2 3D 检测
2.1 关键点分支
类似 centernet,把目标看成点来检测,但不同的是,smoke 利用的是 3D box 的中心投影点,而不是 2D box 的中心点。

2.2 回归分支
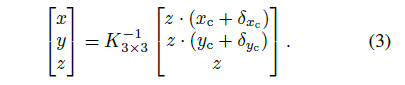
首先是 location,网络回归的都是偏差,对于 Z 方向的值,通过预设的偏移量和尺度因子来计算: 对于 x,y,则是通过关键点分支得到的投影中心点和回归的偏移量计算得出,然后在通过反投影计算出 location:
对于 x,y,则是通过关键点分支得到的投影中心点和回归的偏移量计算得出,然后在通过反投影计算出 location:
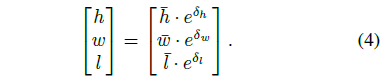
dimension 也是通过统计预设值和回归值来计算:
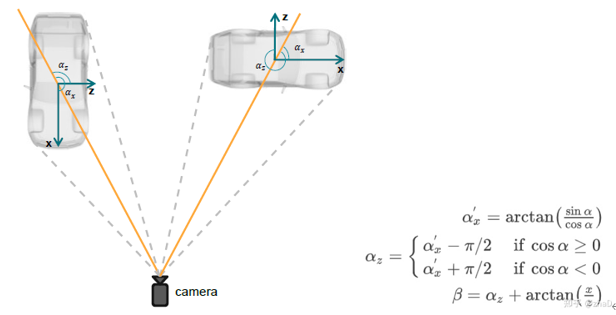
对于航向角的计算比较绕,smoke 并不是直接回归航向角,而是通过间接计算:
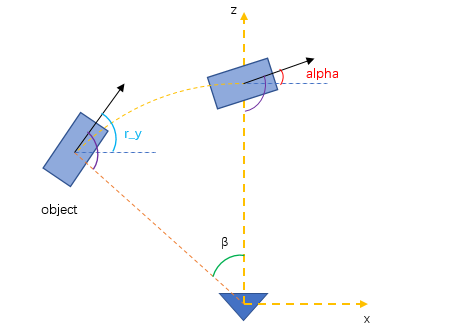
在下图中将小车沿着y轴顺时针旋转,待小车和camera连线与相机坐标系的z轴重合时停止,那么紫色的角是没有发生变化的。于是有

r_y 和 alpha 就是 KITTI label 中的 rotation_y 和 alpha,β 就是论文中的 αz。但 smoke 也不是直接回归 αz,而且转化成另外一个变量 αx,αx 也是编码成 [sin(α), cos(α)],进行归一化处理
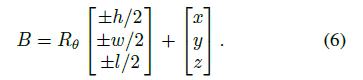
基于上面的计算值,就可以 3D box 的8个顶点坐标了
3 loss 计算
3.1 关键点分类 loss
与 centernet 类似,在 focal loss 的基础上加权,对中心点附近的位置降低loss权重,并通过巧妙的设计来抑制中心附近的回归值,让只有中心一个尖峰:


3.2 回归 loss
smoke 使用了 disentangling loss 形式来计算回归分支的 loss,计算 3D box 需要 rotation_y,dimension 和 location 三个变量,disentangling 则是用一个预测值 + 两个 groundtruth 值来计算,从而得到三个 3D box,在进行 L1 loss 计算。 所以总的 loss 就是 分类 loss 和 3 个不同的 L1 回归 loss
所以总的 loss 就是 分类 loss 和 3 个不同的 L1 回归 loss

结论:
SMOKE 的backbone 使用了 DLA,而且依赖 Dcnv,所以模型比较大,对落地部署不是很友好。而且是依赖镜头的内参的,不清楚多种数据训和训练效果如何。3D框的回归比较稳定,但存在漏检,尤其是小目标和只出现一部分的目标。如果能参考主流 2D 检测的多层检测,和优化关键点分支的策略,也许能缓解这些问题。
编辑:黄飞
-
PyTorch3D 3D深度学习函数库2022-06-21 870
-
人脸检测算法及新的快速算法2013-09-26 3939
-
3D检测系统可检测PCB板针脚高度2016-01-05 5571
-
PowerPC小目标检测算法怎么实现?2019-08-09 2703
-
基于ToF的3D活体检测算法研究2021-01-06 3246
-
如何去实现相位模糊估计的帧同步检测算法?2021-05-06 1457
-
3D图像生成算法的原理是什么?2021-06-04 1641
-
分享一款高速人脸检测算法2021-12-15 1718
-
基于YOLOX目标检测算法的改进2023-03-06 1546
-
P2P环境下的蠕虫检测算法2009-03-29 568
-
基于硬件的游程检测算法实现2011-03-31 707
-
3D分组密码算法2018-01-14 1159
-
如何使用FPGA实现多通道自相关信号检测算法2021-03-10 2642
-
基于深度学习的目标检测算法2021-04-30 11691
-
解开车辆检测算法之谜2023-01-05 2505
全部0条评论

快来发表一下你的评论吧 !
