

永磁同步电机模型预测转矩控制学习
电子说
描述
导读:本期主要学习介绍模型预测控制(MPC, Model Predictive Control),主要分为四个部分,MPC基本原理、MPTC控制原理、仿真搭建和结果分析。
一、引言
模型预测控制( MPC) 又称为滚动时域控制( RHC) ,产生于20 世纪70 年代末,是一种从工业过程控制中产生的新型控制算法,实用性较强,并在实际应用中得到不断的发展和完善,广泛应用于电力、汽车、化工、航天、能源等领域。
一般工业过程中存在多变量耦合、非线性以及不确定性等问题,很难建立准确的模型。因此,采用经典PID 控制器或者是一些传统的控制算法所得到的效果并不理想,存在一定的局限性。MPC 最突出的特点是“边走边优化”,且对模型的精确性要求较低,因此能够有效地用于复杂对象的控制。
模型预测控制应用于电气传动系统中时,可分为连续控制集模型预测控制( CCS-MPC)和有限控制集模型预测控制 ( FCS-MPC) 。两者的主要区别: ( 1) 优化方式不同。CCS-MPC利用数学工具对价值函数求最优解得到最优控制量; 而FCS-MPC 利用变换器的离散性和有限性,遍历电压矢量,价值函数最小的电压矢量即最优控制量。( 2) 作用方式不同。CCS-MPC 中控制量是通过脉冲宽度调制( PWM) 方式作用于系统; 而FCS-MPC 中控制量直接作用于系统。与CCS-MPC相比,FCS-MPC 将目标优化和开关状态决策过程优化成一步,且具有概念简单、适用范围广、约束和非线性易纳入价值函数等优点,因此成为了近年来的研究热点之一。
二、MPC基本原理
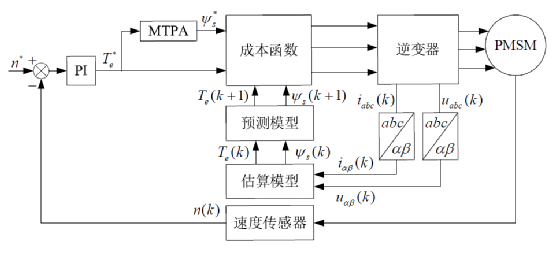
图1 模型预测转矩控制框图
由图1可以看出,MPTC 策略主要由有限控制集、电机预测模型、定子磁链观测器和价值函数组成。其中,有限控制集是包含所有的备选开关状态的集合,两电平逆变器的有限控制集包含8种开关状态。
在 MPTC 系统中,通常选取转矩误差和磁链误差进行成本函数设计:

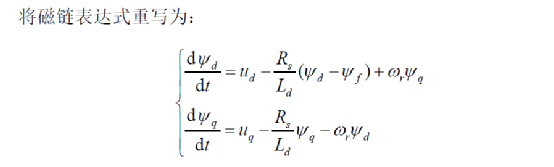
由于电机机械时间常数较大,且系统控制周期很短,因此可以认为在一个控制周期中电机转子角速度Wr没有发生变化。使用欧拉法对上式进行计算可以得到磁链预测方程:
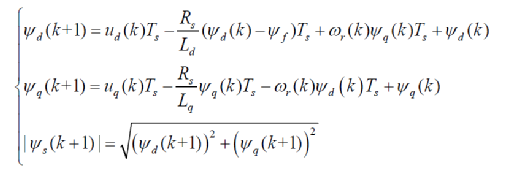
根据上式磁链预测公式,再结合电流与磁链之间的关系,得到预测电流公式:
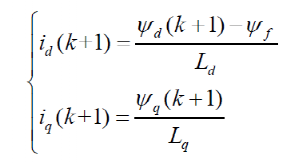
综上可以获得电机的转矩预测方程,得到:
三、模型搭建
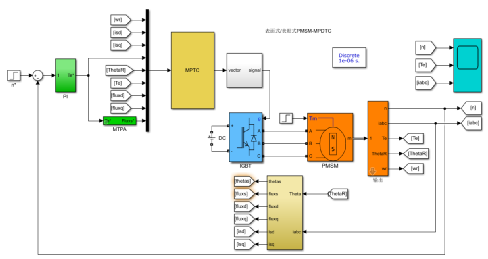
图2 异步电机模型预测转矩控制系统仿真
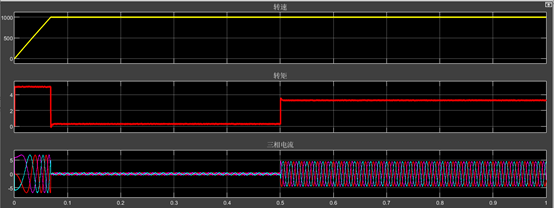
图3仿真波形变化情况
由图3电机仿真波形的变化情况中可以说明搭建的模型预测转矩控制的有效性。
审核编辑:汤梓红
-
永磁同步电机直接转矩控制(PMSM DTC)simulink仿真2023-03-15 1349
-
永磁同步电机控制笔记-22023-03-14 1138
-
永磁同步电机的直接转矩控制简介2021-08-27 1518
-
永磁同步电机模型预测控制matlab/simulink仿真模型2021-07-05 2586
-
永磁同步电机模型预测控制Simulink仿真教程资料下载2021-06-30 2049
-
永磁同步电机最优直接转矩控制原理及实现方法2018-06-05 1712
-
永磁同步电机转矩解析模2018-03-20 1221
-
永磁同步电机的直接转矩控制(英文)外文翻译2017-01-21 1151
-
永磁同步电机的模型预测控制研究_杨义2017-01-08 937
-
占空比调制的永磁同步电机直接转矩控制2017-01-07 836
-
永磁同步电机最大转矩电流比控制研究2016-01-19 8124
-
永磁同步电机直接转矩控制系统和仿真2009-06-06 639
全部0条评论

快来发表一下你的评论吧 !
