

管理应力和应变,在高精度倾斜/角度传感中获得最佳性能
描述
作者:Paul Perrault and Mahdi Sadeghi
加速度计是奇妙的传感器,能够感应静态和动态加速度,从重力方向到桥梁开始失效的细微运动。这些传感器的范围从手机级设备(当您倾斜显示器时会改变显示器的方向)到有助于导航军用车辆或航天器的出口控制战术级设备。1但是,与大多数传感器一样,传感器在实验室或台式中表现良好是一回事。在面对狂野和不受控制的环境和温度压力时,在系统级别获得这种性能是另一回事。当加速度计像人类一样,在其一生中经历前所未有的压力时,系统可能会由于这些压力的影响而做出反应并失败。
高精度倾斜传感系统通常经过校准,以实现优于 1° 的倾斜精度。利用市场领先的超低噪声和高稳定性加速度计,如ADXL354或ADXL355,通过适当校准可观察到的误差源,可以实现0.005°的倾斜精度。2然而,只有适当减轻应力,才能达到这种精度水平。例如,传感器上的压缩/拉伸应力会导致高达20 mg的偏移,从而使倾斜误差超过1°。
本文回顾了使用加速度计的高精度角度/倾斜传感系统的性能指标。首先,在微观层面了解传感器设计本身,以便更好地理解微米级应力和应变的影响。如果不遵循整体机械和物理设计方法,它将显示一些令人惊讶的结果。最后,它将以设计人员可以采取的切实步骤结束,以最大限度地提高最苛刻应用中的性能。
ADXL35x 传感器设计
基于MEMS的加速度计可以在价格和性能方面涵盖从消费类产品到军事传感的所有范围。ADI公司产品组合中性能最佳的低噪声加速度器是ADXL354和ADXL355,它们支持精密倾斜检测、地震成像等应用,以及机器人和平台稳定领域的许多新兴应用。ADXL355具有市场领先的特性,使其在高精度倾斜/角度检测应用中独树一帜,如出色的噪声、失调、可重复性和温度相关失调,以及振动校正和跨轴灵敏度等二阶效应。作为高精度加速度计的示例,将详细探讨该特定传感器;但是,本节讨论的原理适用于绝大多数3轴MEMS加速度计。
为了更好地理解ADXL355实现最佳性能的设计考虑因素,首先回顾传感器的内部结构是有益的,这将阐明三个轴对环境参数(例如,面外应力)产生不同响应的原因。在许多情况下,这种面外应力是由传感器z轴上的温度梯度引起的。
ADXL35x系列加速度计由弹簧质量系统组成,与许多其他MEMS加速度计类似。质量响应于外部加速度(如重力的静态加速度或速度变化的动态加速度)而移动,其物理位移由转导机制感知。MEMS传感器中最常见的转导机制是电容式、压阻式、压电式或磁性。ADXL355采用容性转导机制,通过电容变化感测运动,电容变化通过读出电路转换为电压或电流输出。虽然ADXL355对硅芯片上的所有三个轴传感器均采用电容式转导机制,但X/Y传感器和Z传感器具有两种根本不同的电容式检测架构。X/Y 传感器基于差分面内手指,而 Z 传感器是面外平行板电容式传感器,如图 1 所示。
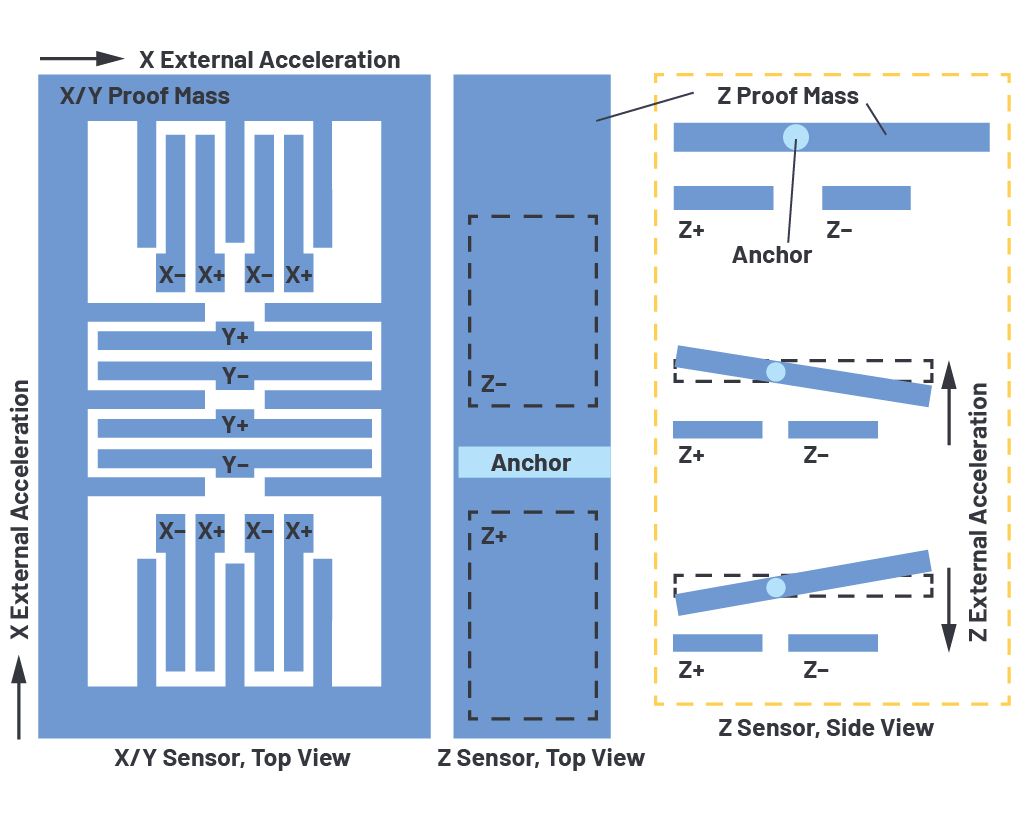
图1.ADXL355的传感器架构。对于 X/Y 传感器,随着证明质量的移动,锚定手指和连接到证明质量的手指之间的电容会发生变化。z 轴传感器上的质量不平衡允许对 z 轴加速度进行面外感应。
如果传感器上有压缩应力或拉伸应力,MEMS模具就会翘曲。由于证明质量用弹簧悬浮在基板上,因此它不会与基板串联翘曲,因此,质量与基板之间的间隙会发生变化。对于 X/Y 传感器,间隙不在电容灵敏度方向上,因为面内位移对手指的电容变化影响最大。这是由于条纹电场的补偿作用。然而,对于Z传感器来说,基板和证明质量之间的间隙确实是传感间隙。因此,它对Z传感器有直接影响,因为它有效地改变了Z传感器的传感间隙。另一个加剧效应是Z传感器位于模具的中心,对于模具上的任何给定应力,翘曲最大化。
除了物理应力外,由于大多数应用中z轴的传热不对称性,z轴传感器上的温度梯度也很常见。在典型应用中,传感器焊接到印刷电路板(PCB)上,整个系统都在一个封装内。X 和 Y 传热主要是通过封装周边的焊点传导到对称的 PCB。然而,在z方向上,当热量通过空气并流出封装时,由于芯片顶部的焊接和对流,热量传递是通过底部的传导进行的。由于这种不匹配,z轴上将存在残余温差梯度。与物理压缩/拉伸应力一样,这将在 z 轴上产生不是由加速度引起的偏移。
环境压力下的数据审查
虽然ADXL354(模拟输出)加速度计可以连接到任何模拟数据采集系统进行数据分析,但ADXL355评估板经过优化,可直接放置在客户系统中,以便于与现有嵌入式系统进行原型设计。本文使用了小尺寸评估板EVAL-ADXL35x。为了进行数据记录和分析,EVAL-ADXL35x连接到SDP-K1微控制器板,并使用Mbed环境进行编程。Mbed 是 ARM 微控制器板的开源免费开发环境。它有一个在线编译器,可让您快速入门。SDP-K1 板连接到 PC 时显示为外部驱动器。要对电路板进行编程,只需将编译器生成的二进制文件拖放到 SDP-K1 驱动器中即可。®®3, 4
一旦Mbed系统通过UART记录数据,我们现在有一个基本的测试环境,用于试用ADXL355实验,并将输出流式传输到简单的终端进行数据记录和进一步分析。需要注意的是,无论加速度计的输出数据速率如何,Mbed代码都只是在2 Hz处记录寄存器。 在 Mbed 中,日志记录速度可能比这更快,但这超出了本文的范围。
一个好的起始数据集有助于建立基线性能,并验证我们大多数后续数据分析中预期的噪声水平。使用Panavise铰接虎钳臂5具有吸盘安装座,可在工作台设置中具有相当稳定的工作表面,因为它粘在玻璃工作表面上。在这种配置下,ADXL355板(从侧面固定)与实验室台式一样稳定。更高级的高级用户可能会注意到,这种虎钳支架可能会有一些倾倒运动的风险,但这是一种简单且经济有效的方法,允许根据重力改变方向。如图2所示,将ADXL355电路板放置在支架中,捕获一组60秒的数据用于首次分析。
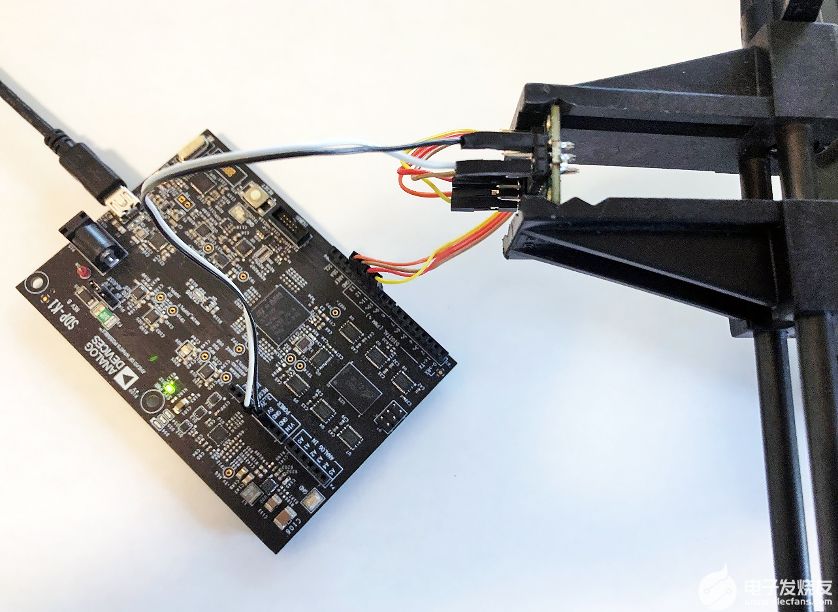
图2.使用EVAL-ADXL35x、SDP-K1和PanaVise卡口进行测试设置。
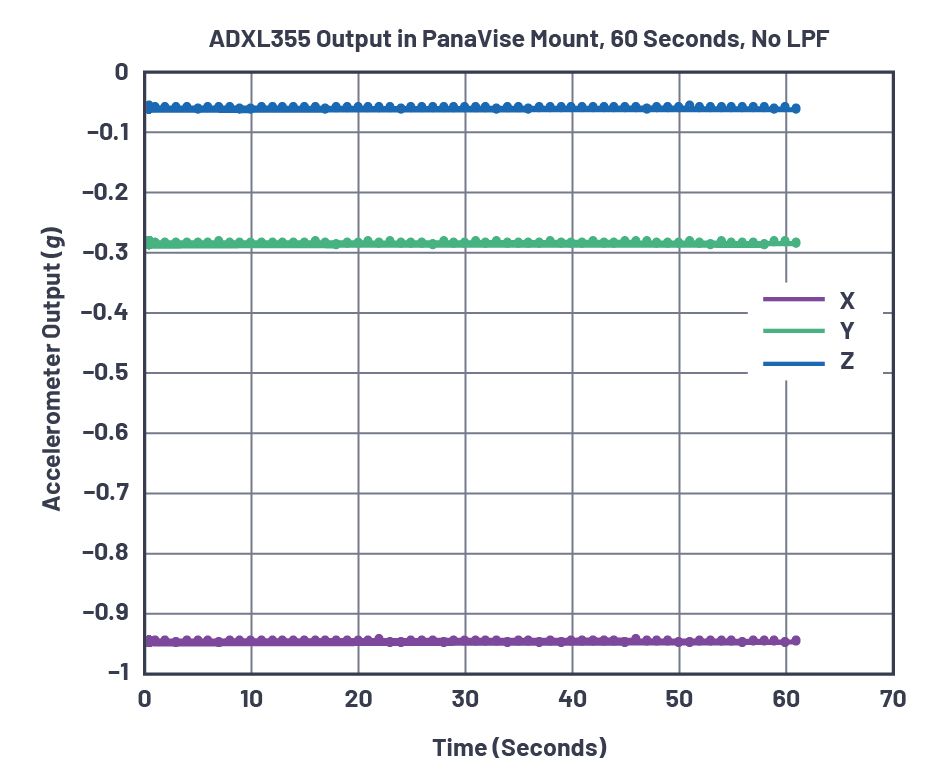
图3.不带低通滤波器的ADXL355数据(寄存器0x28=0x00),耗时超过1分钟。
取120个数据点并测量标准偏差显示噪声在800 μg至1.1 mg范围内。根据数据手册中的ADXL355典型性能规格,我们看到噪声密度为25 μg/√Hz。使用默认的低通滤波器(LPF)设置时,加速度计的带宽约为1000 Hz。 假设使用砖墙滤波器,噪声预计为25 μ g/√Hz× √1000 Hz = 791 μg rms。第一个数据集通过了第一个嗅探测试。准确地说,从噪声频谱密度到均方根噪声的转换应该有一个因子来表示数字LPF没有无限滚降(即砖墙滤波器)的事实。有些器件使用1.6×系数实现简单的RC单极点20 dB/十倍频程滚降,但ADXL355数字低通滤波器不是单极点RC滤波器。无论如何,假设系数在1到1.6之间至少可以让我们进入噪声期望的正确近似值。
对于许多精密传感应用,1000 Hz 的带宽对于被测信号来说太宽了。为了帮助优化带宽和噪声之间的权衡空间,ADXL355内置数字低通滤波器。对于下一个测试,我们将LPF设置为4 Hz,这应该使噪声净降低√1000 / √4倍≈16。这在 Mbed 环境中使用图 4 所示的简单结构简单完成,而数据如图 5 所示。6滤波后,噪声明显如预期下降。如表 1 所示。
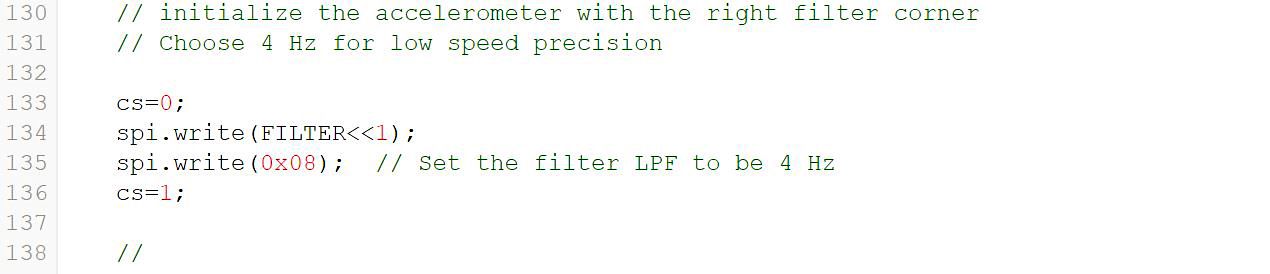
图4.用于配置寄存器的 Mbed 代码。
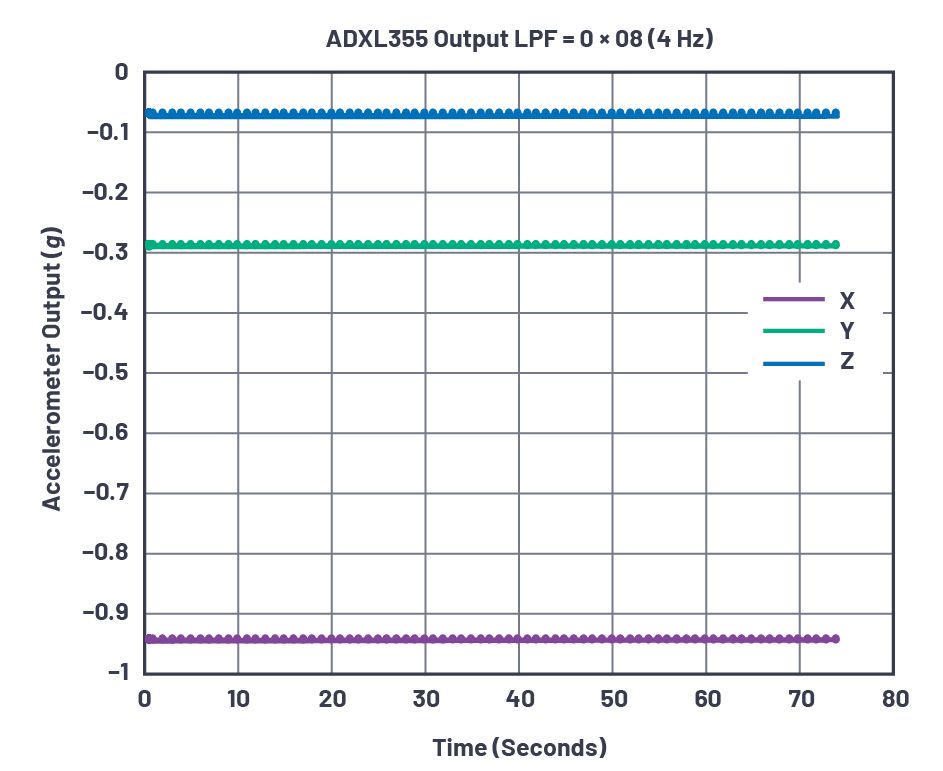
图5.LPF设置为4 Hz(寄存器0x28=0x08)的ADXL355数据,耗时超过1分钟。
| 噪声 | X | Y | Z | |||
| 理论 (μg) | 测量 (μg) | 理论 (μg) | 测量 (μg) | 理论 (μg) | 测量 (μg) | |
| 无过滤器 | 791 | 923 | 791 | 1139 | 791 | 805 |
| 4 Hz 滤波器 | 50 | 58 | 50 | 185 | 50 | 63 |
表1显示,采用当前设置的y轴噪声高于理论预期。在调查了可能的原因后,我们注意到额外的笔记本电脑和其他实验室设备风扇振动可能在 y 轴上表现为噪音。为了测试这一点,旋转虎钳以将x轴放置在y轴用于此测试的位置,并且较高的噪声轴确实移动到x轴。因此,轴之间的噪声差异似乎是仪器噪声,而不是加速度计轴上噪声水平的内在差异。这种类型的测试实际上是低噪声加速度计的“Hello World”测试,因此它为进一步测试提供了信心。
为了了解热冲击对ADXL355的影响有多大,我们使用了热风枪。7并将其置于较冷的空气模式(实际上比室温高几度),以便对加速度计施加热应力。温度也使用ADXL355的板载温度传感器记录。该实验使用虎钳垂直放置ADXL355,以便气枪可以在封装顶部吹气。该实验的预期结果是,随着芯片升温,偏移的温度系数会出现,但任何热应力差分几乎都会立即出现。换句话说,如果各个传感轴对差热应力敏感,则预计加速度计输出会出现凸起。在数据安静时从数据中删除平均值,可以同时轻松比较所有三个轴。结果如图 6 所示。
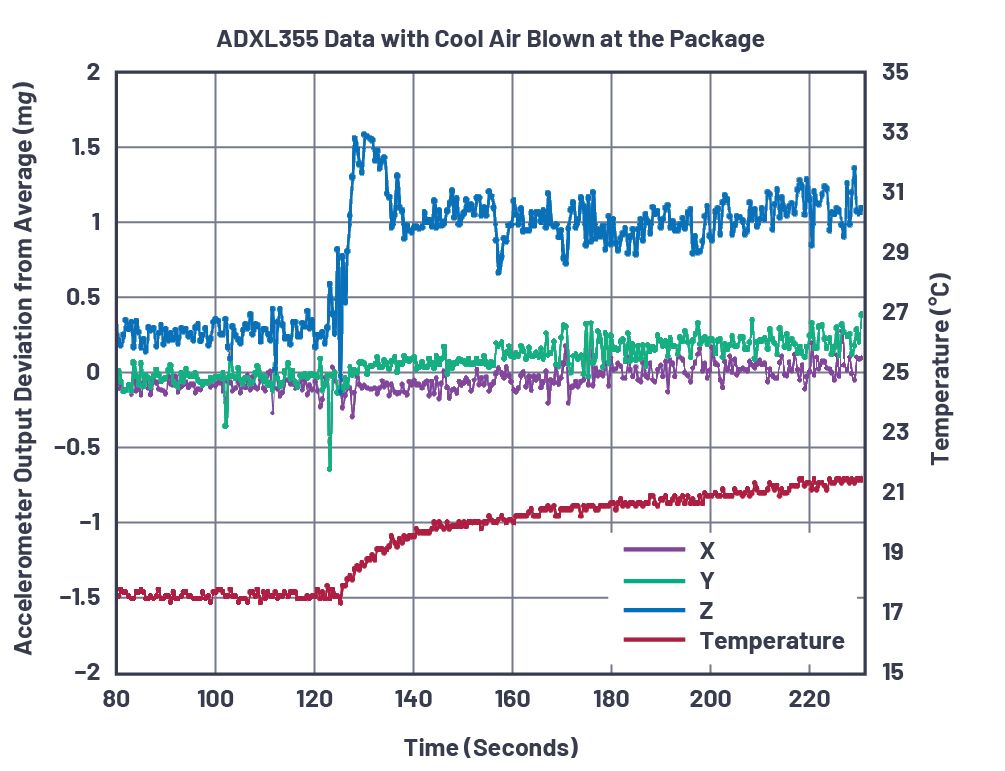
图6.ADXL355在冷设置下使用热风枪的热冲击数据。
如图6所示,气枪将稍热的空气吹到陶瓷封装上,陶瓷封装对环境密封。这导致 z 轴偏移 ~1500 μ g,y 轴偏移量小得多(可能为 ~100 μg),并且 x 轴几乎没有偏移。虽然许多最终客户产品在PCB顶部有一些分布差热应力的外壳,但重要的是要考虑这些类型的快速瞬态应力,这些应力可能表现为失调误差,如这个简单的测试所示。
图7显示了热风枪关闭时的相反极性效应。
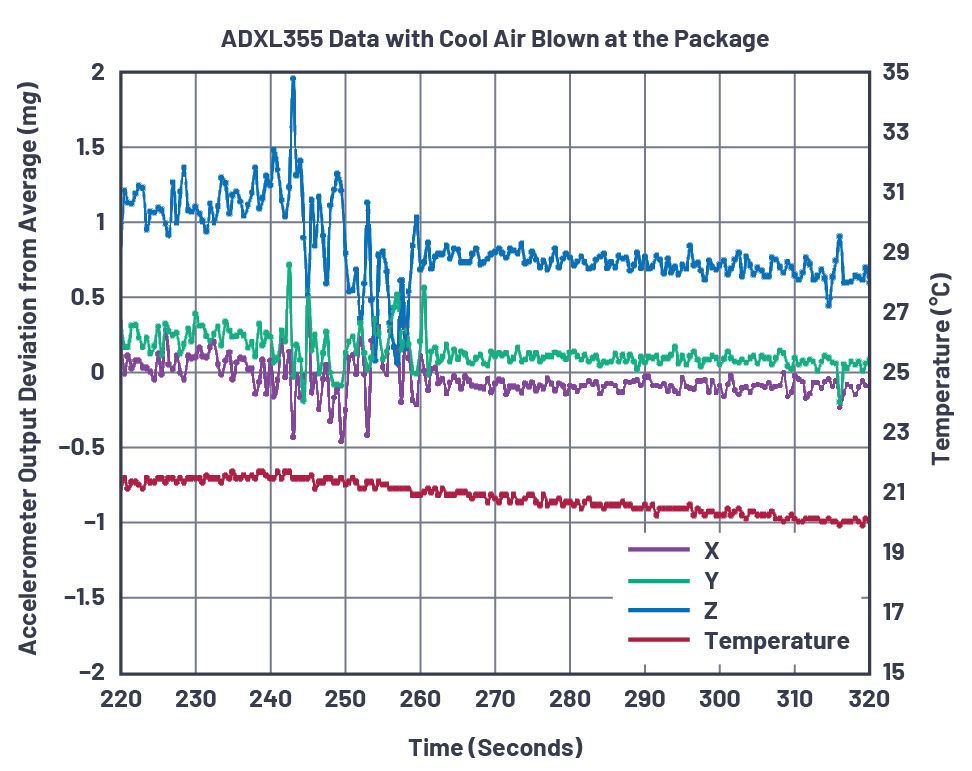
图7.ADXL355热冲击,气枪在t = 240秒时关闭。
当气枪在加热环境中使用时,这种效果更加明显;也就是说,当温度冲击幅度较大时。Weller气枪的输出大约在~400°C左右,因此远距离使用以防止过热或热冲击造成的损坏非常重要。在该测试中,热空气在距离ADXL355约15 cm处吹出,导致~40°C的几乎瞬时温度冲击,如图8所示。
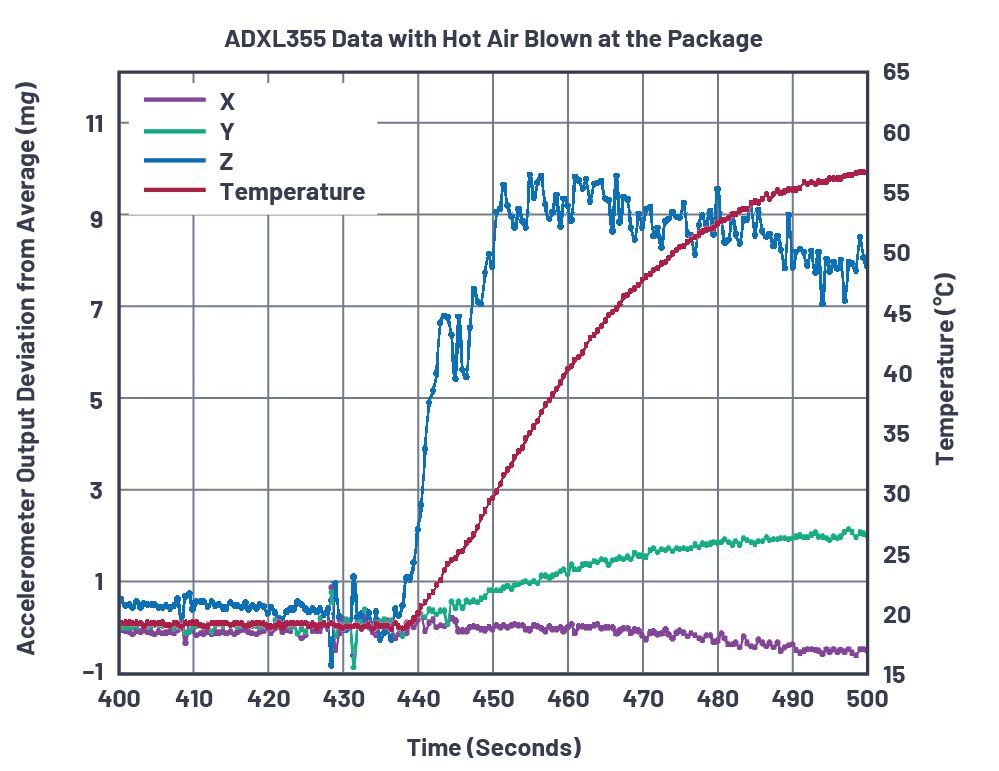
图8.带热风枪的ADXL355热冲击。
尽管热冲击量相当大,但在这个实验中,z轴的响应速度比x轴和y轴快得多,这仍然令人惊讶。使用数据手册中的偏移温度系数,当温度偏移40°C时,预计在40 °C = 4 m g偏移×观察到约100 μg/°C,x轴和y轴最终开始显示。然而,注意到z轴上几乎瞬间的10 mg偏移表明,这是一种正在处理的不同效应,而不是由于温度引起的偏移。这是传感器上的热应力/应变差分的结果,在z轴上最明显,因为该传感器对微分应力比x和y更敏感,如本文前面所述。
ADXL355的典型失调温度系数(失调温度系数)在数据手册中规定为±100 μg/°C。了解此处使用的测试方法很重要,因为偏移温度系数是用烤箱中的加速度计测量的。烘箱在传感器的温度范围内缓慢斜坡,并测量偏移的斜率。一个典型的示例如图 9 所示。
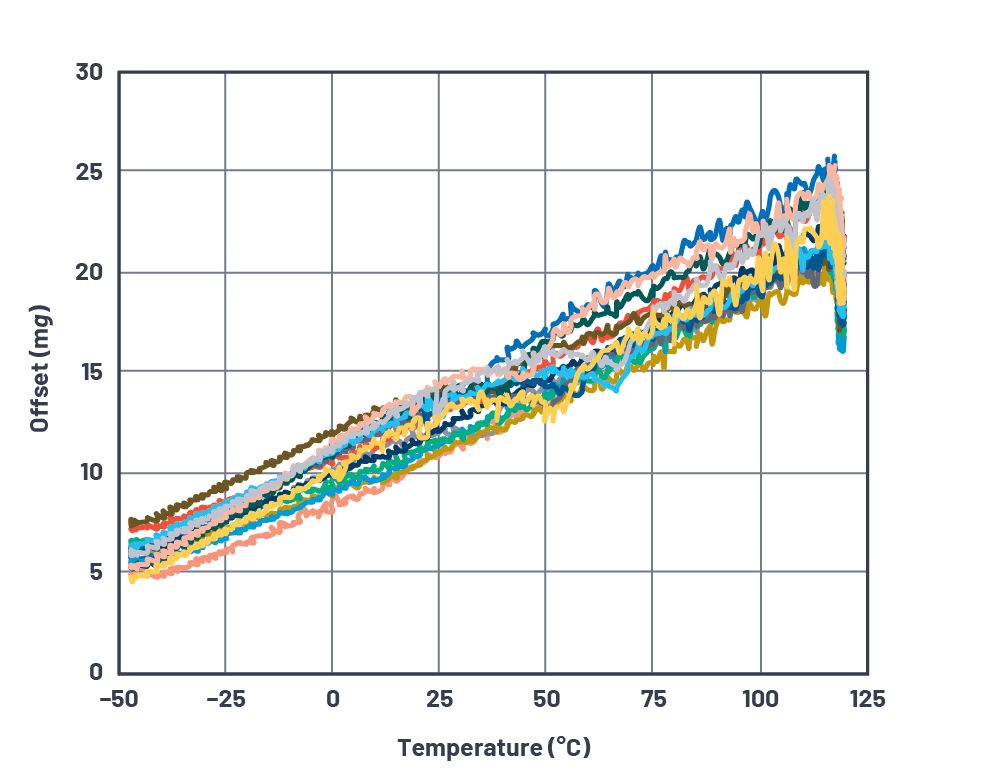
图9.ADXL355基于烘箱的温度表征。
在这个情节中有两个效果在起作用。一个是数据手册中表征和记录的偏移温度系数。这可以解释为从 –45°C 到 +120°C 的许多部件的平均值,因为烤箱以 5°C/min 的速度升温,但没有任何浸泡时间。这将从类似于图9的曲线得出,在165°C或约109 μg/°C时,其范围略高于100 μg/°C的典型值,但在数据手册中规定的最小和最大范围内。但是,请考虑图9的右侧,因为器件继续在120°C下浸泡约15分钟。当器件处于高温时,实际偏移量下降并改善。在这种情况下,平均值在165°C或约60 μg/°C偏移温度系数下接近10 mg。第二个影响是差热应力,因为传感器证明质量在整个硅器件的温度上稳定下来,然后应力降低。这是在图6至图8所示的气枪测试中看到的效应,重要的是要了解这种效应在比数据手册中列出的长期失调温度系数更快的时间尺度上工作。这对于许多系统来说可能是有价值的,由于其整体热动力学,它们的升温速度可能比5°C/min慢得多。
影响ADXL355稳定性的其他因素
一旦很好地理解了设计中的热应力,惯性传感器的另一个重要方面是其长期稳定性或可重复性。重复性定义为在相同条件下长时间连续测量的精度。例如,在很长一段时间内,在相同温度下对重力场进行两次测量,看看它们的匹配程度。在无法适应定期维护校准的应用中评估传感器的长期稳定性时,偏移和灵敏度的可重复性至关重要。许多传感器制造商没有在其数据手册中描述或指定长期稳定性。在ADI公司的ADXL355数据手册中,预测的重复性为10年,包括高温工作寿命测试(HTOL)(T一个= 150°C, V供应= 3.6 V和1000小时),测量的温度循环(−55°C至+125°C和1000个周期),速度随机游走,宽带噪声和温度滞后。ADXL35x系列具有出色的重复性,如数据手册所示,ADXL355对于X/Y和Z传感器的重复性分别为±2 mg和±3 mg。
在稳定的机械、环境和惯性条件下的可重复性遵循与测量时间相关的平方根定律。例如,要获得 x 轴 2.5 年的偏移重复性(最终产品的任务曲线可能更短),请使用以下公式:±2 m g × √(2.5 年/10 年)= ±1 mg。图 10 显示了 23 天内 32 个器件的 0 g 失调漂移的 HTOL 测试结果示例。在此图中可以清楚地观察到平方根定律。还应该强调的是,由于MEMS传感器制造过程中的工艺差异,每个部件的行为都不同,有些部件的性能比其他部件更好。
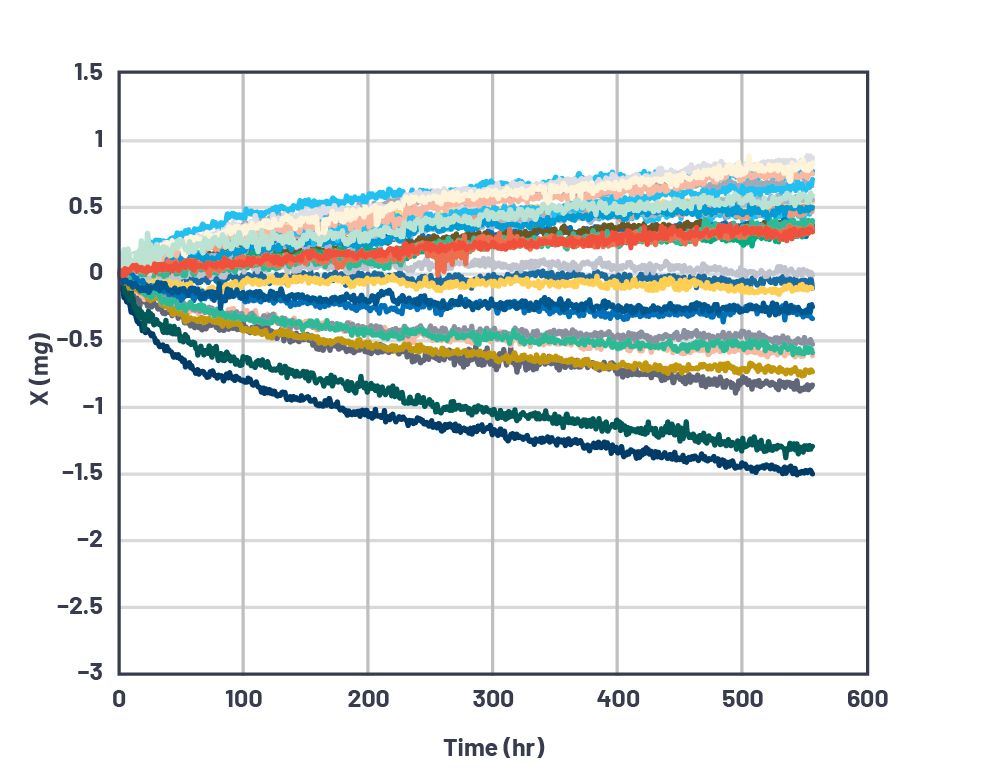
图 10.ADXL355 的 500 小时长期稳定性。
机械系统设计建议
根据前面讨论的知识,很明显,机械安装接口和外壳设计将有助于ADXL355传感器的整体性能,因为它会影响传播到传感器的物理应力。通常,机械安装,外壳和传感器形成二阶(或更高)系统;因此,其响应在共振或过阻尼之间变化。机械支持系统具有代表这些二阶系统的模式(由共振频率和品质因数定义)。在大多数情况下,目标是了解这些因素并尽量减少它们对传感系统的影响。因此,应选择传感器封装的任何外壳的几何形状以及所有接口和材料,以避免ADXL355应用带宽内的机械衰减(由于过阻尼)或放大(由于谐振)。此类设计注意事项的详细信息超出了本文的范围;但是,简要列出了一些实用项目:
PCB、安装和外壳
将 PCB 牢固地连接到刚体基板上。使用多个安装螺钉与PCB背面的粘合剂相结合可提供最佳支撑。
将传感器靠近安装螺钉或紧固件放置。如果PCB几何形状很大(几英寸),请在电路板中间使用多个安装螺钉,以避免PCB的低频振动,这些振动会耦合到加速度计并进行测量。
如果 PCB 仅由凹槽/舌形结构机械支撑,请使用较厚的 PCB(建议厚度大于 2 毫米)。对于几何形状较大的PCB, 增加厚度以保持系统的刚度.使用有限元分析(如ANSYS或类似技术)为特定设计提供最佳的PCB几何形状和厚度。
对于结构健康监测等长时间测量传感器的应用,传感器的长期稳定性至关重要。应选择封装、PCB和粘合剂材料,以尽量减少机械性能随时间推移的退化或变化,这可能会导致传感器上的额外应力,从而造成偏移。
避免对外壳的固有频率做出假设。在简单外壳的情况下计算固有振动模式,在更复杂的外壳设计的情况下计算有限元分析将是有用的。
事实证明,将ADXL355焊接到电路板上会产生应力积聚,会导致高达几毫克的偏移。为了减轻这种影响,建议在PCB上通过铜走线的PCB着陆图案、导热焊盘和传导路径对称。请严格遵循ADXL355数据手册中提供的焊接指南。还观察到,在某些情况下,在任何校准之前进行焊接退火或热循环有助于缓解应力积聚并管理长期稳定性问题。
灌封化合物
灌封化合物广泛用于固定外壳内的电子设备。如果传感器封装是包覆成型塑料,例如焊盘栅格阵列(LGA),则强烈建议不要使用灌封化合物,因为它们的温度系数(TC)与外壳材料不匹配,导致压力直接施加在传感器上,然后偏移。然而,ADXL355采用密封陶瓷封装,可显著保护传感器免受TC效应的影响。但是,由于材料随着时间的推移而退化,灌封化合物仍然会导致PCB上的应力积聚,从而可能通过硅芯片的小翘曲对传感器造成应变。通常建议避免在需要高稳定性的应用中灌封传感器。低应力保形涂层(如聚对二甲苯C)可以提供某种形式的防潮层作为灌封的替代品。8
气流、传热和热平衡
为了实现最佳的传感器性能,在优化温度稳定性的环境中设计、定位和利用传感系统非常重要。如本文所示,由于传感器芯片上的热应力差,即使是很小的温度变化也会显示出意想不到的结果。以下是一些提示:
传感器应放置在PCB上,以使传感器上的热梯度最小。例如,线性稳压器可以产生大量热量;因此,它们靠近传感器会导致MEMS两端的温度梯度,该梯度可能随稳压器中的电流输出而变化。
如果可能,传感器模块应部署在远离气流的区域(例如HVAC),以避免频繁的温度波动。如果不可能,封装外部或内部的热隔离是有帮助的,可以通过隔热来实现。请注意,需要考虑传导和对流热路径。
建议选择外壳的热质量,以便在环境热变化不可避免的应用中抑制环境热波动。
结论
本文介绍了高精度ADXL355加速度计如何在不充分考虑环境和机械效应的情况下降低性能。通过整体设计实践和对系统级别的关注,挑剔的工程师可以为他们的传感器系统实现出色的性能。由于我们中的许多人在生活中都经历了前所未有的压力,因此认识到,与加速度计类似,杀死我们的从来都不是压力,而是我们对压力的反应!
审核编辑:郭婷
-
对比光纤应力传感的性能和应变片的性能2022-12-05 3070
-
如何通过应力和应变管理实现高精度倾斜/角度检测性能2022-08-01 1140
-
倾斜角传感器的测量原理是什么?2019-10-23 4385
-
加速度传感器如何测量物体的倾斜角度2019-07-30 3698
-
我们需要具有高精度的角度测量传感器2019-04-22 1787
-
ADI超小型高精度双轴倾斜计传感器2018-11-16 1754
-
角度传感器在BLDC电机控制中的作用2018-10-29 2501
-
ADI业界最高精度、极易使用传感器2018-10-26 1004
-
应力应变测试服务2017-06-08 5211
-
高精度倾斜仪SST2112016-08-02 3477
-
.基于倾角传感器和海量数据存储器在倾斜监测系统中的应用2012-11-20 2709
-
高精度角度传感器自动标定系统2012-08-01 5071
全部0条评论

快来发表一下你的评论吧 !
