

步进电机力矩控制 | 适用于夹爪及开瓶盖场合
描述
随着工业及高精度工艺的飞速发展,机械自动化的运动控制替代了许多人工重复性的工作,智能化的生产线让企业在效率上得到了大大的提升。应对不同的生产环境,工业机器人夹爪的性能起到了至关重要的作用,柔性、自动控制、自动反馈、智能抓取等复杂操作,是企业核心技术及生产效率的核心。
Trinamic步进伺服控制器,能够实现电机的力矩控制(扭矩控制)。特别是应用在一些机器人夹爪、工业夹爪、实验室自动化、开盖扭瓶盖等场合。
Trinamic如何实现力矩控制
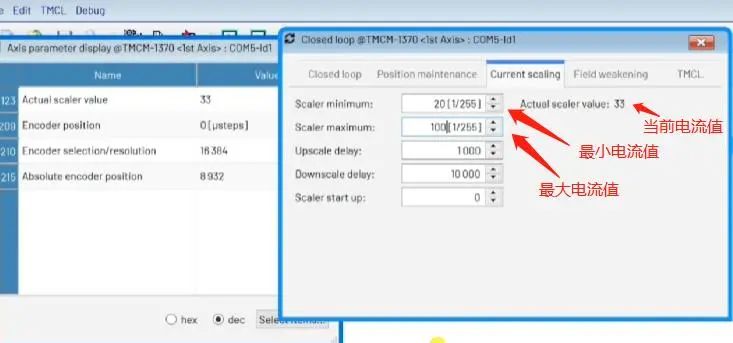
扭矩(力矩)控制,用Trinamic的一体式步进伺服闭环控制器为例,支持串品或者是CAN通信,通过TMCL-IDE上位机软件进行设定它的力矩值,通过软件上传指令,如设定最小电流/电大电流,电机工作时它的电流会在这最大值与最小值之间,负载越大电流值越大,当我们需要力控制的时候,我们可以通过编码器反馈的值来进行设定一个合适的值,当外面的力达到所设定的值时,就会触发一个输出信号。
灵活性与安全性
面对不同的物体,我们担心的是输出的力会损失被夹的物体。那我们可以根据实际所需要的设置最大的力,也就是它的最大电流值,对于夹爪外部用力的控制也体现的相当灵活。我们也可以通过程序,让它达到所设定的最大值时,自动停下来。
在夹爪工作的同时,程序会不断的监控它的力,不让它输出的力大于某一个值,当它达到这个值时,电机就会停下来,并且始终保持这个力,但又不会夹坏这个物体,确保物体的安全性,也同时提升了夹爪的的性能。
总结
Trinamic的运动控制及上位机软件,能够让您轻松的掌握它的控制方法,让项目更快完工。步进伺服的力矩控制,在实现位置、速度闭环的同时,它会随着负载而不断发出信号,我们也可以让这个信号做出更多动作,如停止、保持一段时间、反转等,当信号结束后,又会回到原来的位置,更有利于夹爪或者其他应用场合的工作灵活性与安全性。
-
浅析步进电机的加减速控制2016-01-12 4309
-
L6470:驱动器适用于每相最大3A电流的步进电机吗?2018-12-18 3430
-
STM32的独立看门狗与窗口看门狗主要适用于哪些场合2021-09-02 1569
-
步进电机力矩的怎么计算2021-09-03 2883
-
交流高压真空接触器适用于哪些场合2021-09-24 3843
-
闭环控制步进电机对比传统开环控制的优点2022-11-12 3106
-
DSA和CAN总线的步进电机控制系统2009-04-02 1008
-
基于力矩斩波控制的步进电机驱动电路和驱动方案2012-05-22 1498
-
51芯片编程:步进电机控制2016-04-28 563
-
步进电机运动控制策略2022-09-08 1859
-
光控晶闸管适用于什么场合2023-02-28 2225
-
步进电机和伺服电机哪个好_步进电机和伺服电机的区别2023-03-07 7361
-
步进电机力矩控制 | 适用于夹爪及开瓶盖场合2023-01-05 2182
-
电动夹爪的运动控制方案2024-02-23 2603
-
如何编程电机控制器2025-01-22 2004
全部0条评论

快来发表一下你的评论吧 !
