

用于安全关键应用的双AMR电机位置传感器
描述
本文将深入探讨汽车电气化的趋势,随着我们向部分和完全自动驾驶迈进,特别是使电动助力转向(EPS)和电动制动系统符合必要的安全标准以确保无人驾驶车辆安全可靠控制所需的变化。
ADI公司(ADI)是磁阻(MR)位置传感器产品和基于分流器的电流检测放大器产品的供应商,可为EPS和电气制动系统中使用的无刷电机提供高性能换向和安全运行。
介绍
近年来,人们越来越重视提高车辆安全性,这导致了主动高级驾驶辅助系统(ADAS)的可喜进步和引入,以补充依赖安全气囊展开以确保驾驶员和乘客安全的传统被动系统。这些新兴系统旨在最初帮助(但长期取代)驾驶员在安全危急情况下的车辆机动决策。这些技术进步也引领着向半自动驾驶和全自动驾驶的过渡。用电子控制单元(ECU)取代驾驶员的决策,用执行器取代车辆的转向和制动操纵,正在将责任从驾驶员转移到传感器、ECU和电动执行器。这一趋势正在导致开发更可靠、更智能、更高性能和冗余的电动执行器解决方案,这些解决方案需要符合 ISO 26262 功能安全标准。这是一个基于风险的安全标准,其中对危险操作情况的风险进行定性评估,并在组件和系统中设计安全措施,以避免或控制系统故障,并检测或控制随机硬件故障或减轻其影响。这些执行器系统通常使用无刷直流 (BLDC) 电机驱动器,由于这些系统对安全至关重要,设计人员必须设计解决方案硬件和软件,使系统符合最高的汽车安全完整性等级 (ASIL) D。
无刷直流电机换向和控制
顾名思义,无刷直流电机没有电刷触点,需要电机位置传感器(MPS)来测量定子和转子之间的相对位置,以确保定子线圈正确的通电顺序。当没有反电动势可用且微控制器无法确定相对转子和定子位置时,这一点在启动时尤其重要。
传统上,由三个霍尔开关组成的块换向(见图 1a)用于指示 BLDC 电机中的转子位置。提高性能,特别是降低噪声、振动和声振粗糙度 (NVH) 以及提高 BLDC 电机驱动器(包括 EPS 系统)运行效率的需求正在导致从块换向转向正弦换向控制。霍尔开关可以用位于安装在电机轴末端的双极磁铁前面的 MR 角度传感器代替(参见图 1b)。通常,MPS 安装在 ECU 组件上,ECU 集成到电机外壳中并定位在电机轴的末端。
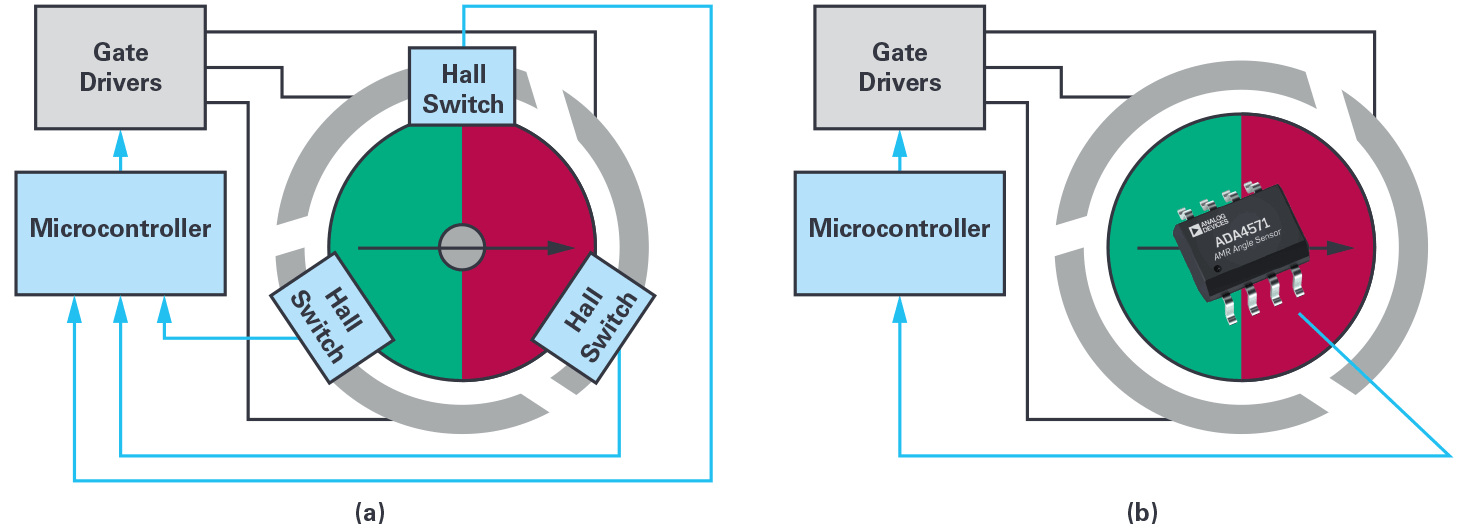
图1.(a) BLDC 块换向控制和 (b) BLDC 正弦换向控制。
安全关键应用的功能安全(示例 EPS)
ISO 26262于2011年推出,作为解决电气安全相关系统故障可能造成的危险的安全标准,随后被2018年版取代。
必须对系统进行安全和风险分析,以确定系统的ASIL。ASIL等级是通过审查系统在运行过程中的严重性、暴露和可控性方面的潜在危险来确定的(见图2)。
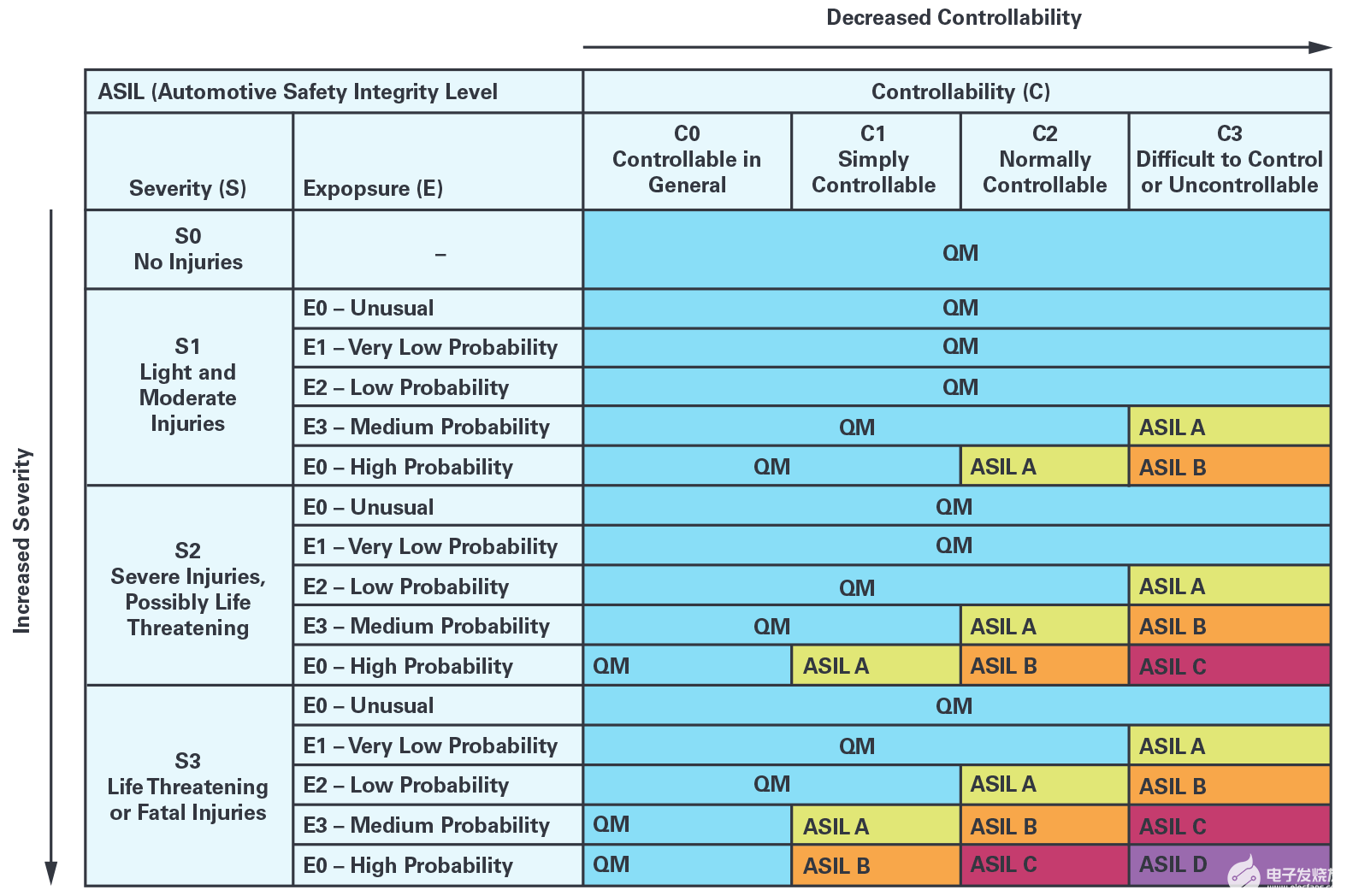
图2.ISO 26262 ASIL 评级矩阵。
例如,如果我们对EPS系统进行风险和危害分析,则可以得出结论,由于ASIL D类别的严重性,可控性和暴露性,诸如转向阻塞和自动转向之类的严重事件落在ASIL D类别中。同样,对于即将推出的电气制动系统,相同的逻辑也适用于制动阻塞或自制动等不可控事件的严重程度。
继EPS或制动系统示例之后,ASIL D系统评级可以通过子系统分解来实现,如下图3a、图3b和图3c所示。

图3.ASIL D 系统的 ASIL 分解方案。
不需要按照ASIL D标准和流程开发每个系统组件,以实现ASIL D系统合规性;但是,从系统级别来看,整个系统必须满足要求,并且可以将 QM、ASIL A、B、C 或 D 级子组件作为系统的一部分。
系统分解还应确保足够的独立性,并考虑到相关或常见原因故障的可能性。
EPS 系统拓扑
典型的EPS系统拓扑如图4所示。EPS ECU根据驾驶员施加到方向盘上的转向扭矩、方向盘位置和车辆速度计算所需的辅助功率。EPS电机通过施加的力旋转舵机,从而降低驾驶员操纵方向盘所需的扭矩。
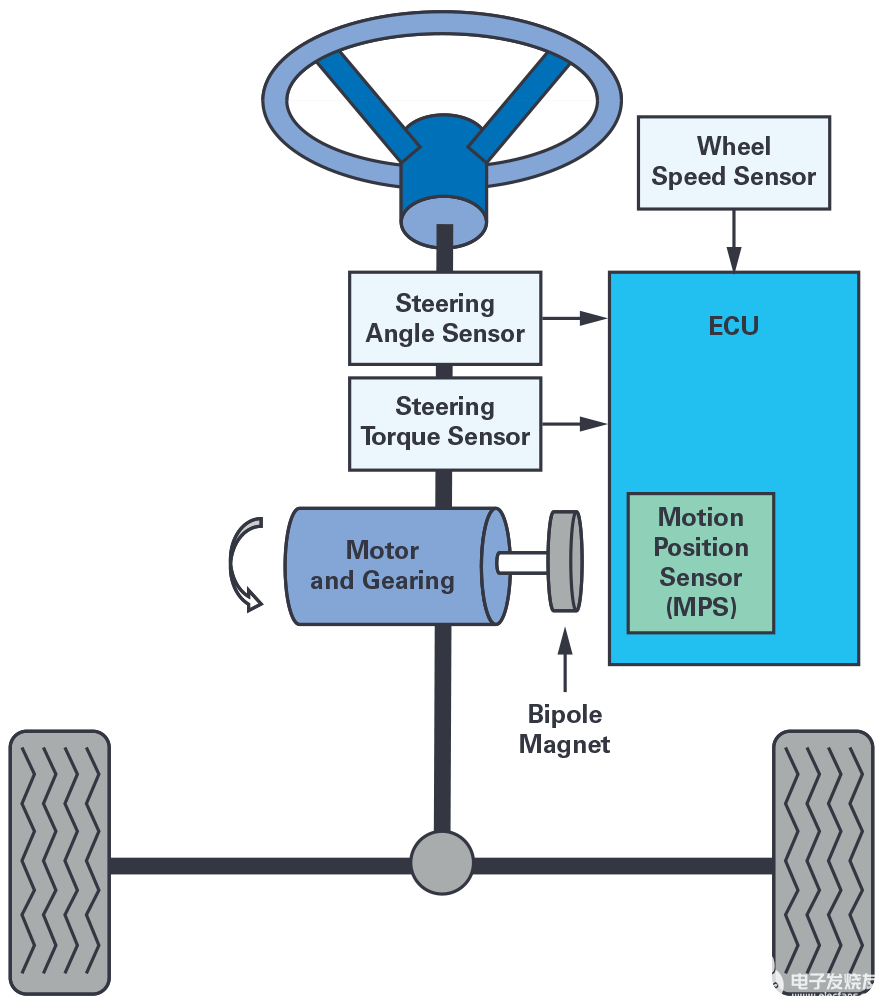
图4.典型的 EPS 拓扑。
电机轴位置(MSP)角度与相电流测量信息相结合,用于EPS电机驱动器的换向和控制。基本的典型EPS电机控制回路如图5所示。所需的扭矩辅助水平因驾驶条件而异,由轮速传感器和扭矩传感器决定,扭矩传感器测量驾驶员或无人驾驶汽车中的电机执行器施加到方向盘上的扭矩。然后,微控制器将MSP数据与相电流数据结合使用,以控制提供给电机的电流负载,以提供所需的帮助。
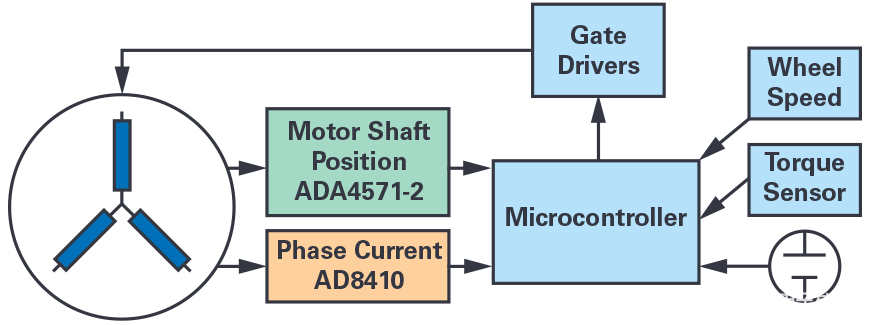
图5.典型的EPS电机控制回路。
EPS 电机位置和相电流传感器
MPS 传感器故障或故障可能会导致或导致严重的系统故障,例如转向锁或自动转向,因此 MPS 是 EPS 系统中的关键组件。因此,系统必须具有全面的传感器故障诊断覆盖范围和内置冗余,以确保在发生MPS传感器错误或故障时继续运行,并确保不会发生严重的系统故障,或者在发生错误时,系统以安全的方式发生故障。
电流检测放大器通常用于电机负载的间接精密测量,通常应用于三个电机相位中的两个,从而提供额外的诊断信息,可用作整个系统安全案例的一部分。
此外,高精度电机位置和相电流测量可以提高EPS电机控制性能,从而在系统级别上产生非常高效、安静和平稳的转向感觉,改善整体驾驶员体验,因此是系统中的关键组件。
EPS 电机控制中的功能安全
可以采用不同的方法在EPS或其他安全关键型电机控制应用中实现ASIL D合规性。以下示例说明双通道各向异性磁阻(AMR)电机位置传感器与ADI公司的电流检测放大器相结合,可以集成到此类系统中,并提供在系统级实现ISO 26262 ASIL D合规性所需的性能和冗余水平。
在图 6 中概述的框图中,双 AMR 传感器与基于替代技术(例如霍尔、GMR 或 TMR)的附加传感器相辅相成。双AMR传感器用作主要(高精度)传感通道,辅助备用传感器技术通道用于三个目的:
启用 2/3 (2oo3) 比较,以验证与其他系统输入结合使用时其中一个传感器通道是否存在故障。
在两个 AMR 通道发生故障时提供位置反馈。
在电机极数不均匀的情况下,向电机换向所需的微控制器提供 360° 象限信息。
精密角度测量将继续由双AMR传感器的两个通道提供。电机负载和轴位置等其他系统诊断可以从精确的相电流检测放大器间接推断为动态状态(反电动势)。
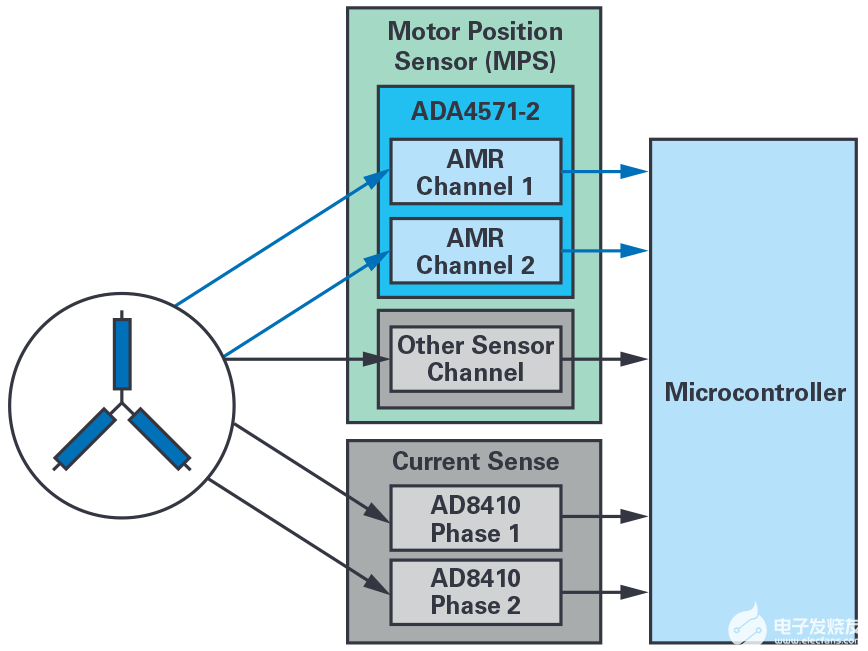
图6.用于安全关键应用的电机位置和相电流检测架构示例。
如果我们查看此传感器架构示例中所有可能的传感器故障模式,则始终应有两个位置传感器输入可用于合理性检查。即使在两个AMR通道由于常见原因故障而同时发生故障的不太可能和极端的情况下,仍然可以使用来自辅助传感器通道的降级位置检测信息,并将其与来自动态状态下电流传感器的反电动势信息进行交叉检查,并确保持续的基本系统功能。
然后,这种系统级诊断功能将确保不会发生严重故障模式,并且系统符合ISO 26262 ASIL D标准。然后可以安全地关闭系统电源,或移至跛行回家模式,并返回经销商进行维修。
总结
为提高汽车安全性而引入ADAS,加上全自动驾驶汽车和半自动驾驶汽车的出现,推动了对符合ISO 26262功能安全标准的更可靠、智能、更高性能和冗余的电动执行器解决方案的需求。ADI公司的电机轴位置和相电流检测产品不仅可以满足平滑高效电机控制的改进性能要求,还可以提供满足EPS或制动系统等安全关键型应用中高ASIL要求所需的冗余。
ADI公司的ADA4571-2双通道AMR传感器专为需要冗余和独立检测通道的安全关键型应用而设计。这是一款集成信号调理放大器和ADC驱动器的2通道AMR传感器。该产品集成了两个AMR(Sensitec AA745)传感器和两个放大器信号调理ASIC。该传感器提供非常低的角度误差信号,通常在0.1°范围内,迟滞可以忽略不计,带宽高,延迟低,线性度良好。这些属性可以减少转矩脉动和可听噪声,从而实现 BLDC 电机的平稳高效控制。此外,AMR传感器在饱和>30 mT下工作,因此没有磁窗上限限制,并且在高磁场下操作传感器使该解决方案对恶劣环境中存在的杂散磁场非常可靠。
ADI公司的电流检测放大器AD8410在EPS和其他BLDC电机控制系统中通过分流电阻执行双向电流测量。这是一款高电压、高分辨率和高带宽分流放大器,设计用于在恶劣环境中工作,在这些环境中需要精确测量以在安全关键应用中提供所需的诊断,并能够减少转矩纹波和可听噪声,从而平稳有效地控制 BLDC 电机,例如 EPS 或制动, 并改善整体驾驶员体验。
审核编辑:郭婷
-
MT6813 磁角度传感器在伺服电机位置检测中的应用2026-03-10 381
-
AMR电机位置传感器在汽车安全上的应用2025-01-09 2071
-
TIDA-060040-带有用于精确电机位置控制的霍尔效应传感器的绝对角度编码器 PCB layout 设计2024-05-21 741
-
位置传感器及编码器关键术语,如何选择合适的位置传感器2023-09-15 3470
-
最常见的电机位置传感器有哪些2023-08-30 9743
-
伺服电机位置模式应用的案例有哪些?2023-08-15 2587
-
无刷电机位置传感器的作用及其布局方面的注意事项2023-02-15 4602
-
双AMR电机位置传感器更适用于安全关键应用2020-12-14 1130
-
双AMR电机位置传感器的详细资料介绍2020-05-24 5005
-
如何使用电机位置传感器来测量定子与转子之间的相对位置2020-05-04 7807
-
双通道AMR传感器在无刷直流电机中的应用解析2020-04-07 2371
-
双AMR电机位置传感器,适用于安全关键应用2020-04-01 1621
-
双AMR电机位置传感器,适用于安全性至关重要的应用2020-01-13 7853
-
电机位置编码器接口设计2017-11-17 3424
全部0条评论

快来发表一下你的评论吧 !
