

PnP几何结构和算法原理详解
描述
PnP(Perspective-n-Point)问题的几何结构如图1所示,给定3D点的坐标、对应2D点坐标以及内参矩阵,求解相机的位姿。
数学语言描述如下:
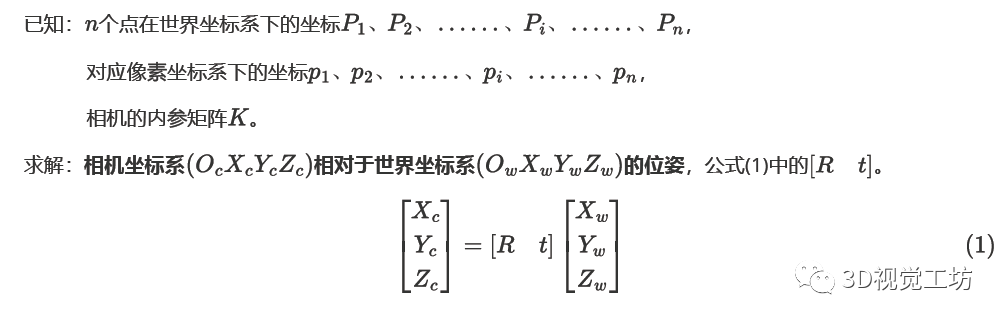
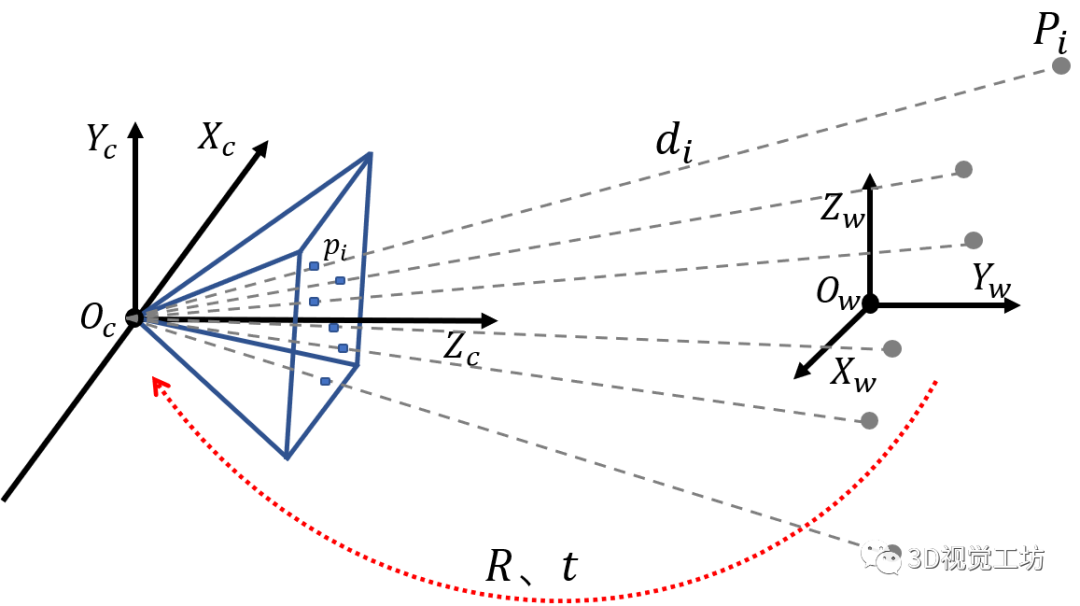
图1.PnP几何结构
1.直接线性变换法(Direct Linear Transform,DLT)
假设:摄像机已经校准过了。 已知:

求解相机的外参:R、t 透视投影模型为:
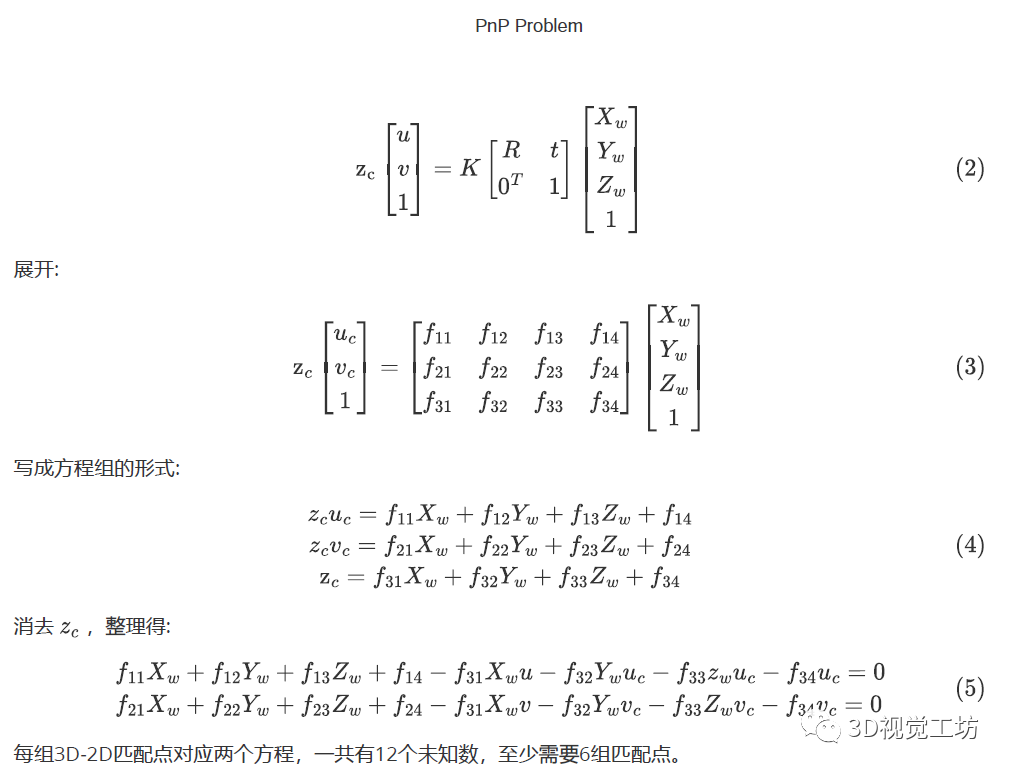
每组3D-2D匹配点对应两个方程,一共有12个未知数,至少需要6组匹配点。 设有N组匹配点,则:
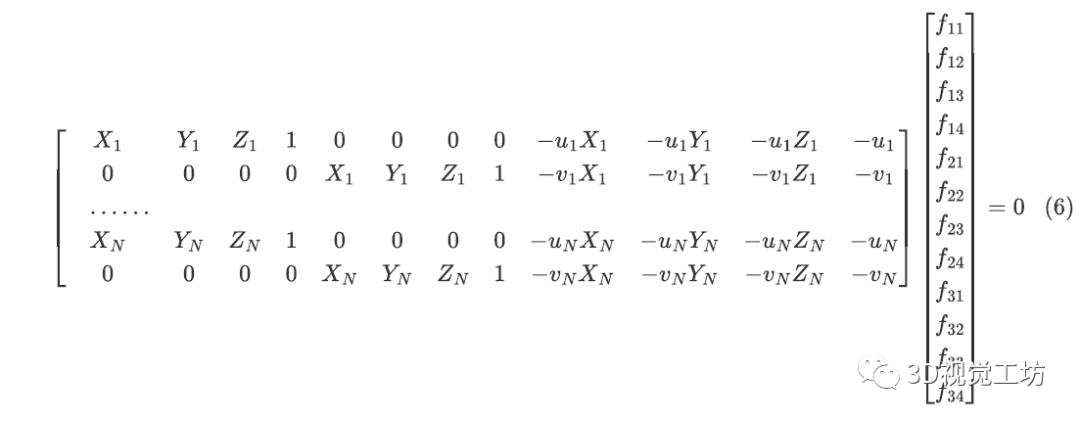
上式写成矩阵形式: AF=0 当N=6时,可以直接求解线性方程组。

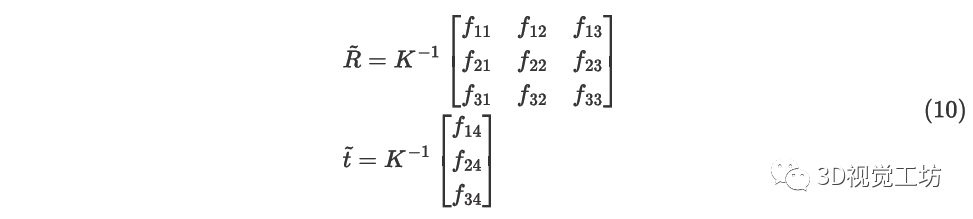
因此, 旋转矩阵, 平移矩阵求得:
2.P3P
P3P问题是已知三个3D目标点与其2D投影之间的对应关系,来确定标定相机的位姿问题。
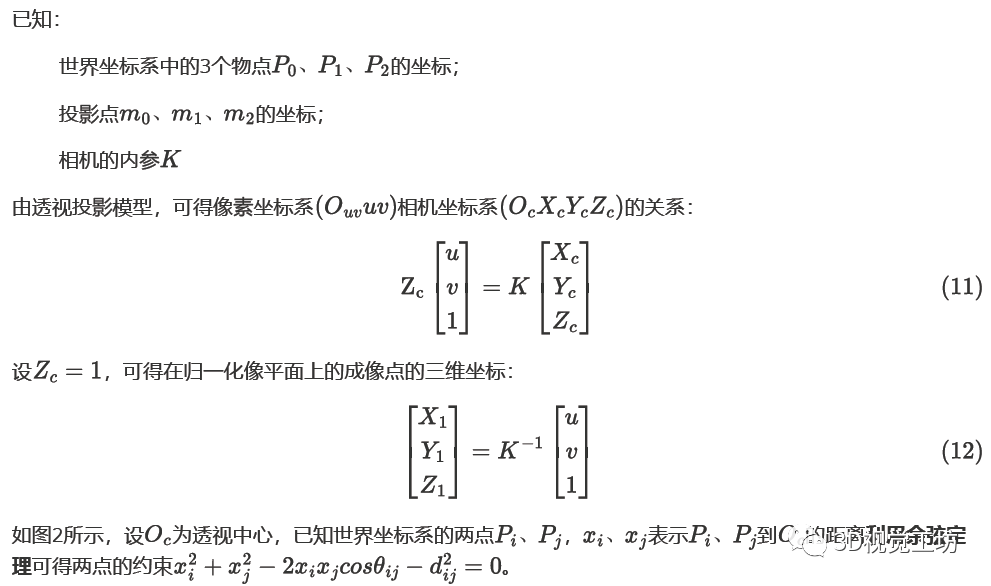
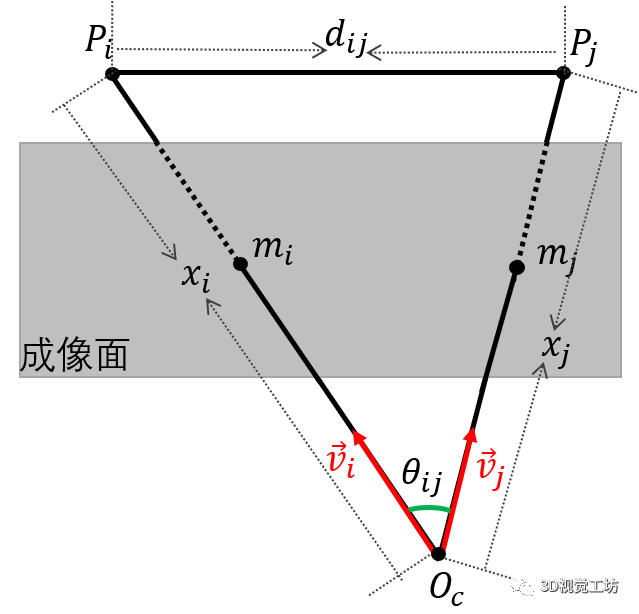
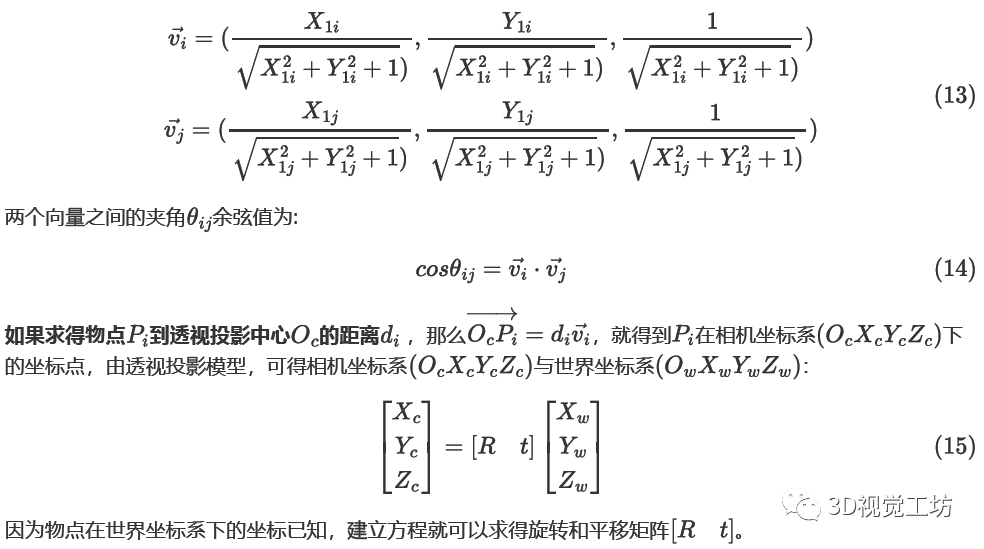
图2.两点约束

注:直接线性变换法,只考虑了线性意义下的最优解,没有考虑几何约束。而P3P考虑了三角约束,给出三角约束意义下的最优解
2.1 Zero Structure for the P3P Equation System
文章[1]:Complete Solution Classification for the Perspective-Three-Point Problem
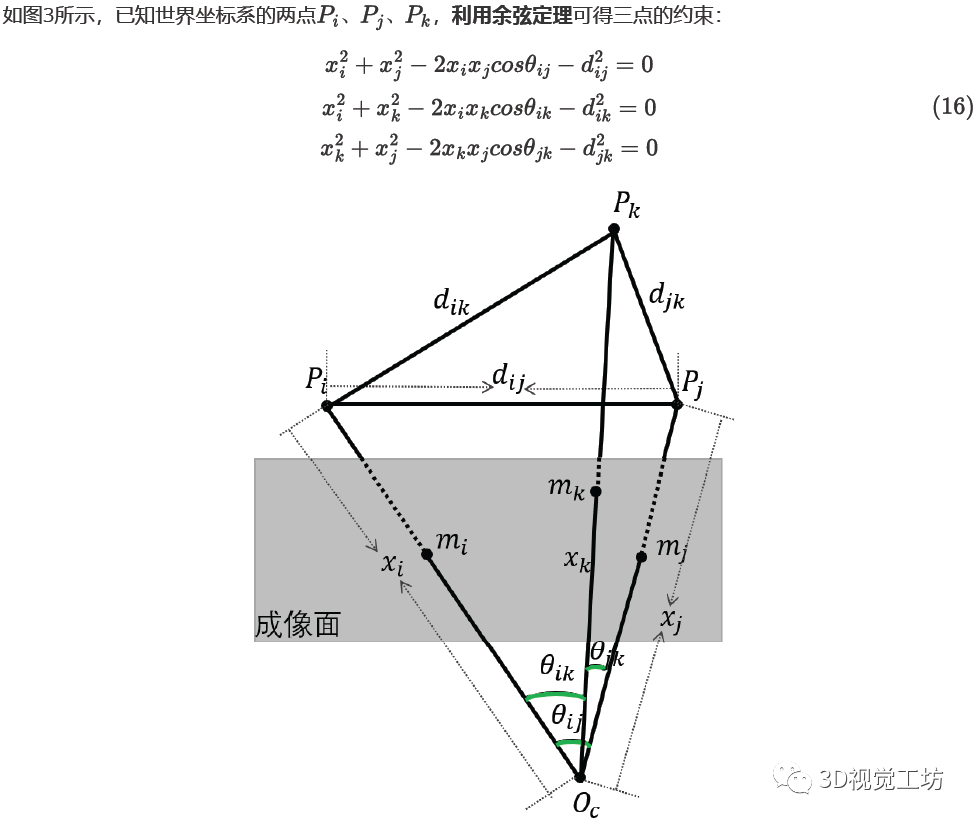
图3.三点约束 对于公式(16)的变量有一些真实的约束:
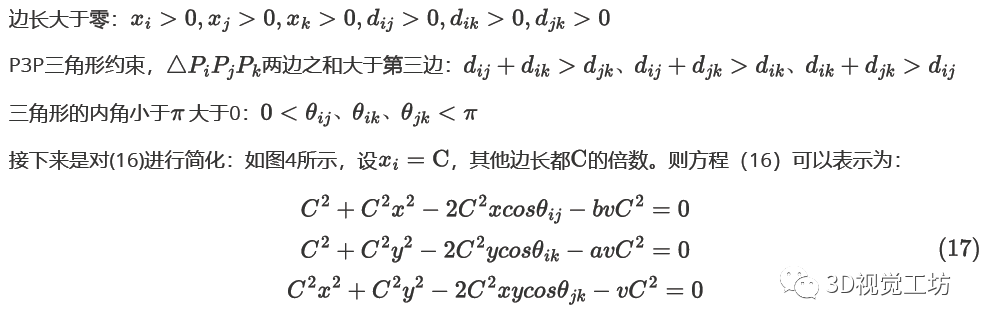
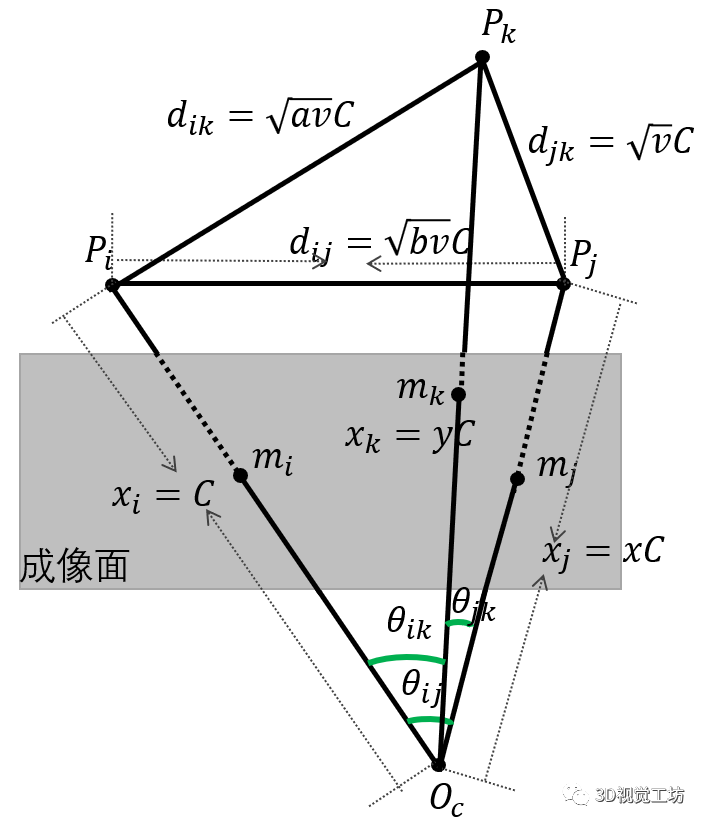
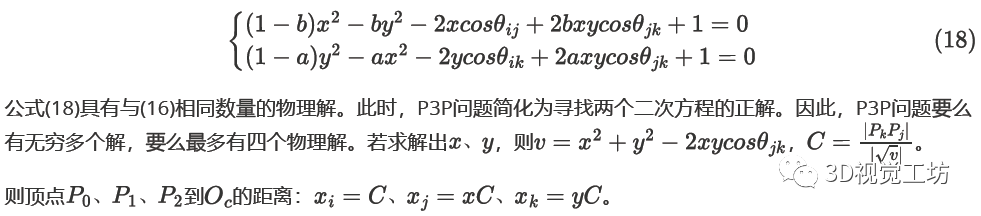
图4.三点约束--重定义边长 公式(17)消去C、v,得ES:
2.2 PST
文章[2]:A Stable Direct Solution of Perspective-Three-Point Problem 使用相似三角形,利用几何约束来减少未知参数的个数,把P3P方程组转化为四次方程,该称为透视相似三角形方法(Perspective Similar Triangle ,PST)。
(1)P3P问题转为PST问题
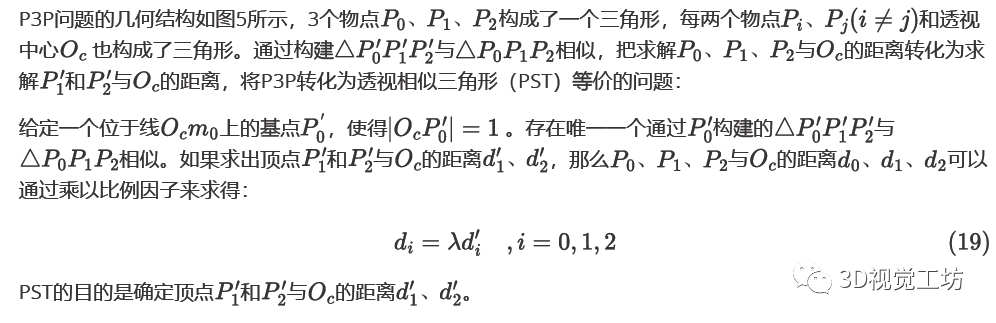
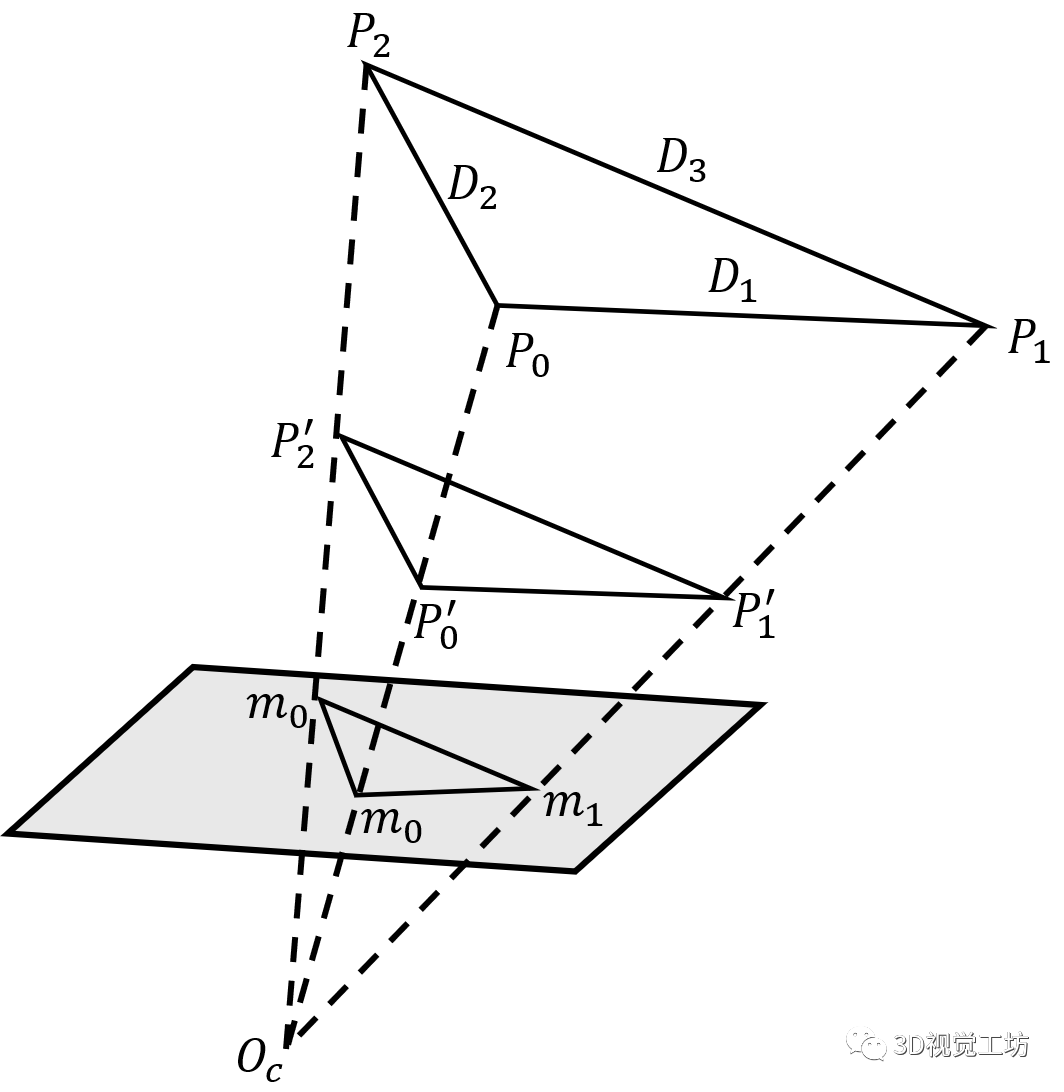
图5.P3P几何结构
(2)PST的求解
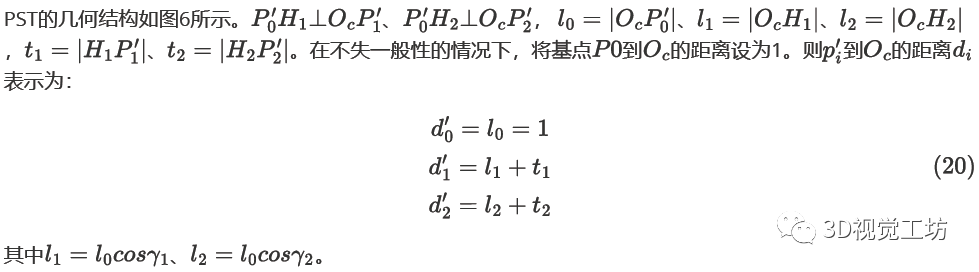
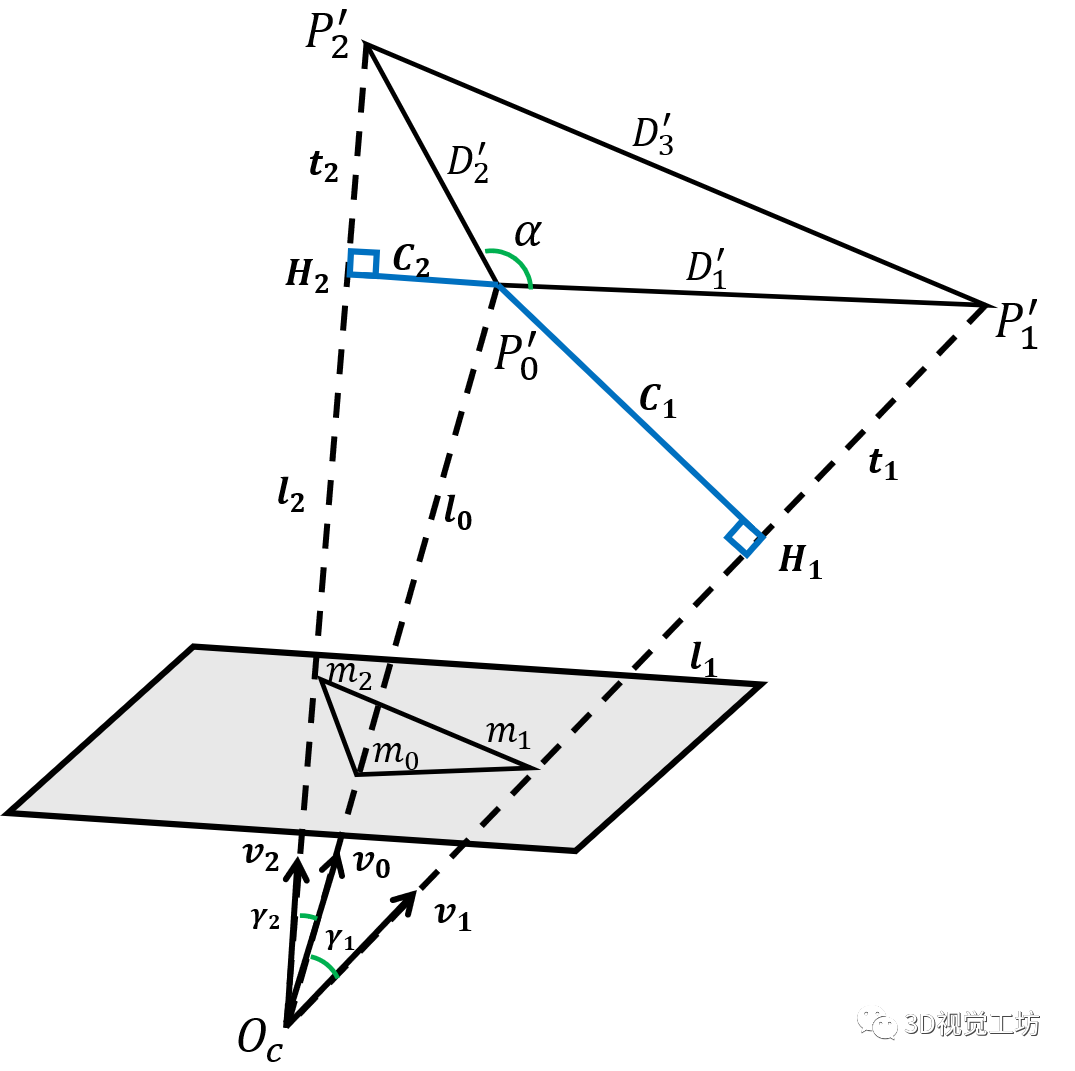
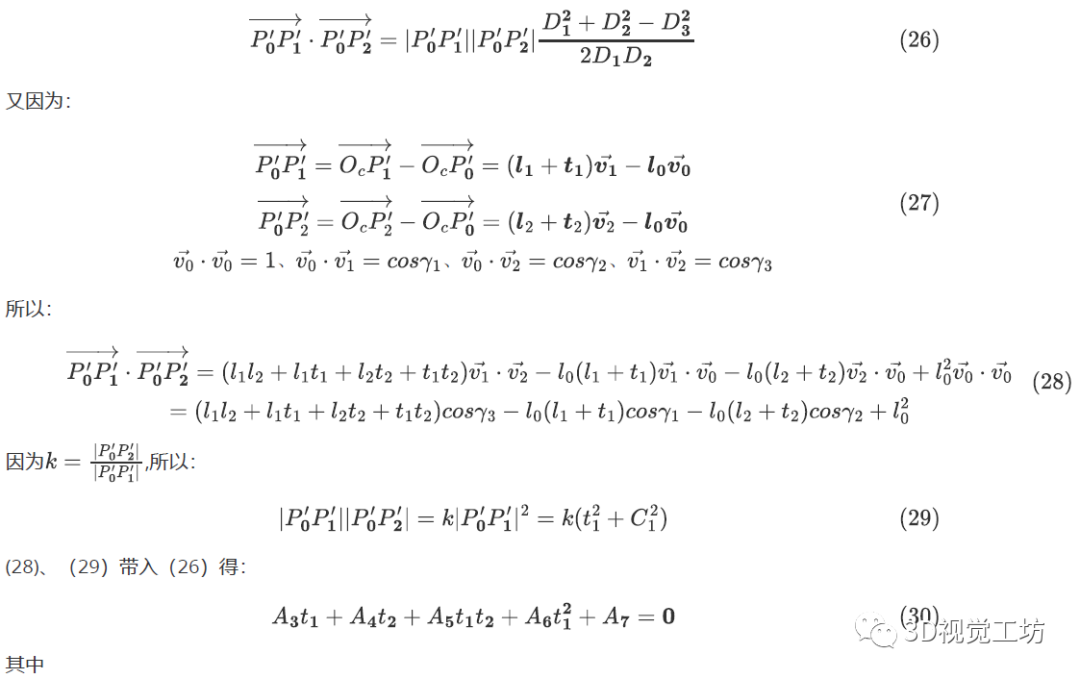
图6.PST几何结构 约束1:相似三角形对应边成比例
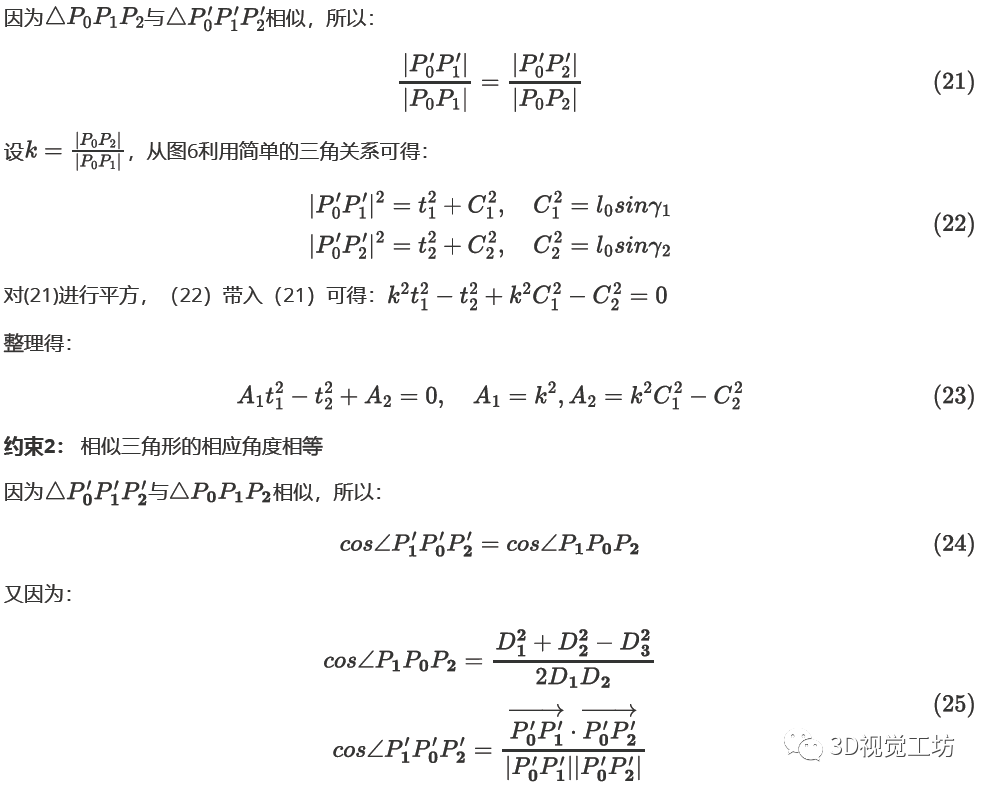
所以:


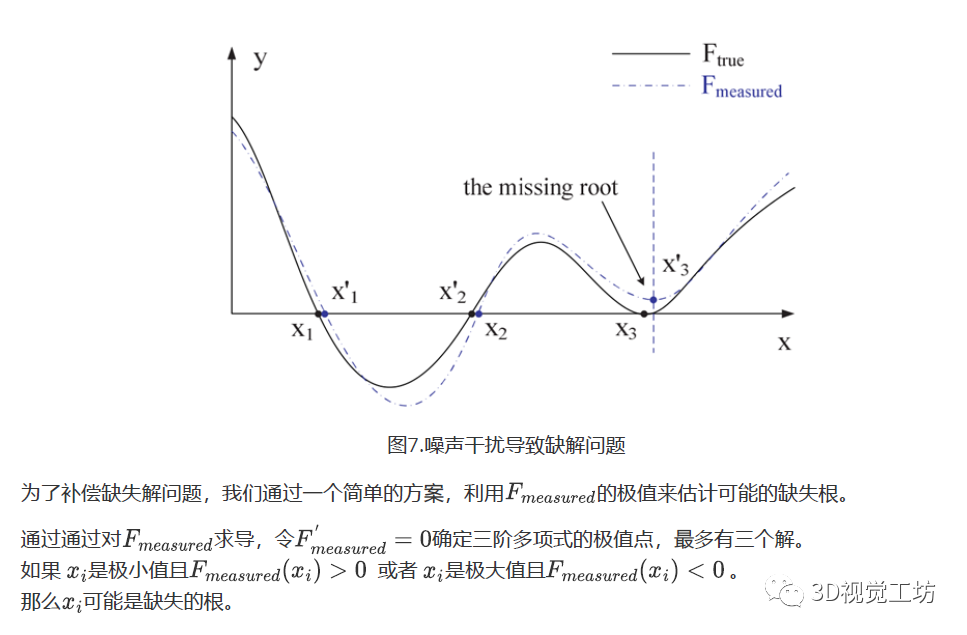
(3)PST多解和缺解问题
由PST(perspective similar Triangle)求解,可得方程组等效转换为四次多项式

多解问题: 由于存在多组解,相机位姿不能从3点集唯一确定的。解的个数直接对应于四次多项式实根的个数。要得到唯一的解,至少还应引入一点,构建2个三角形,进行求解。另一种方法是RANSAC算法,该算法将点集划分为3个点子集,检查这些子集的一致性。 RANSAC算法参考文献:Random Sample Consensus: A Paradigm for Model Fitting with Apphcatlons to Image Analysis and Automated Cartography 缺解问题:

缺解问题是由P3P的固有结构决定的,其他P3P方法,如迭代解法、几何解法和分类法,也有同样的问题。

3.RPnP
文章[3]:A Robust O(n) Solution to the Perspective-n-Point Problem
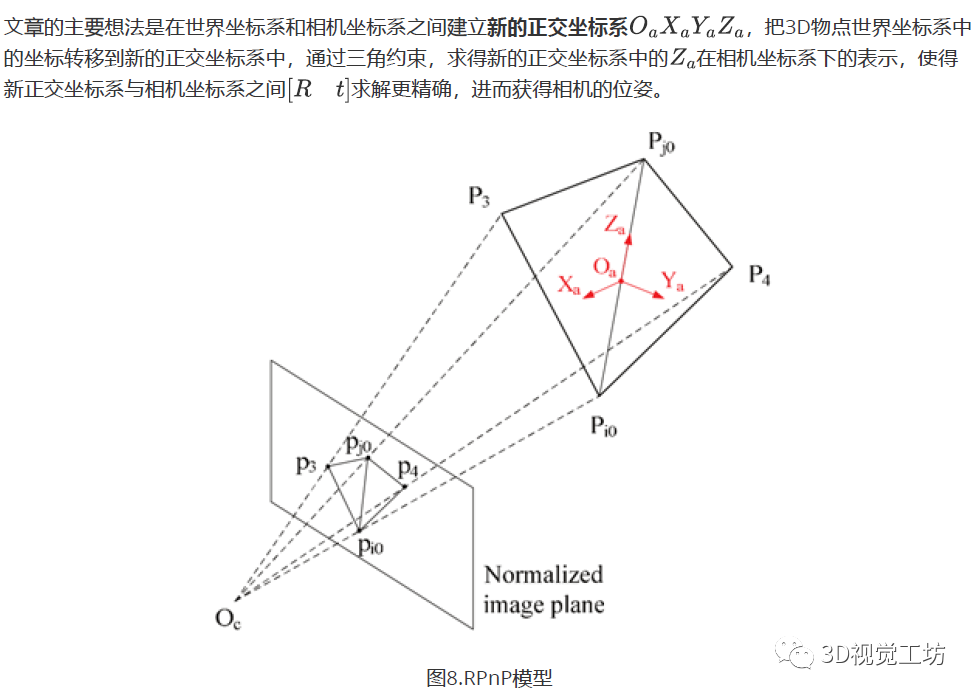
下面来看一下,如何建立新的正交坐标系,以及如何求解正交坐标系到相机坐标系之间[R T]。
3.1确定旋转轴
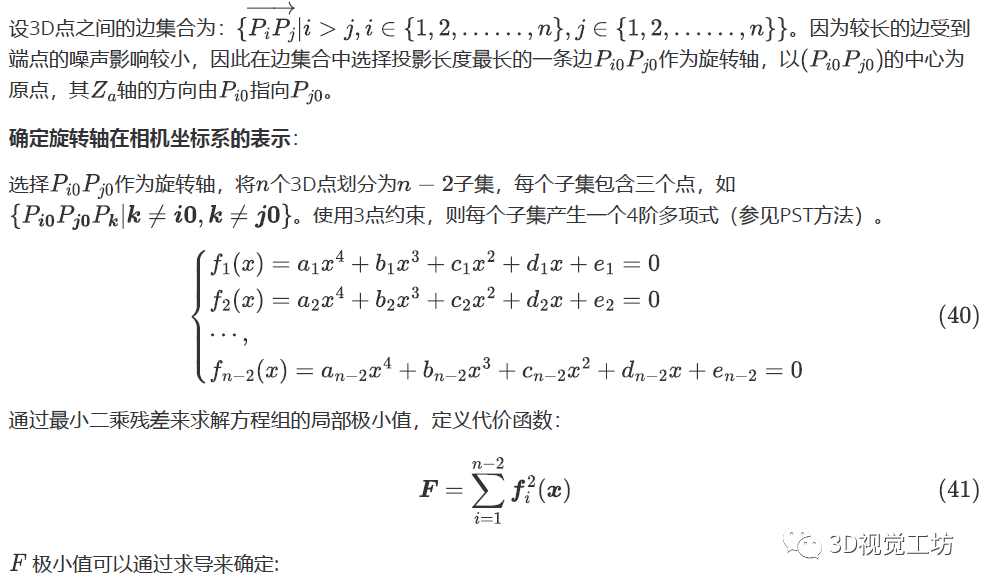
当确定旋转轴时,只需求解剩余的旋转和三个平移参数,减少了未知变量的数量,来提高方程组的数值精度。
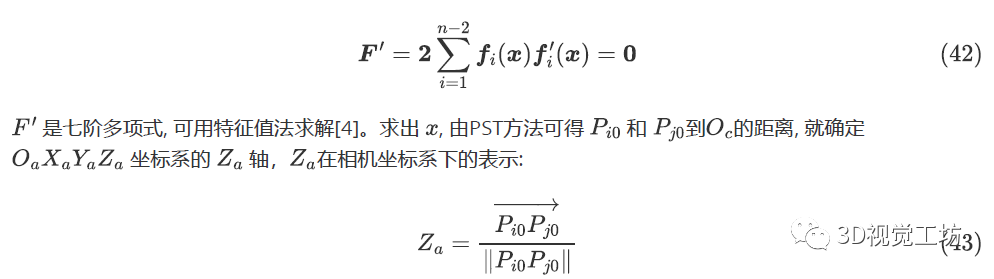
3.2求解旋转角和平移矢量的方程
相机坐标系与新坐标系绕之间的旋转矩阵:

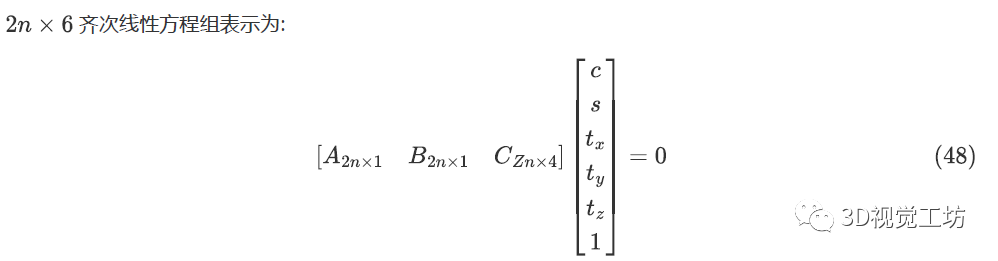
其中,
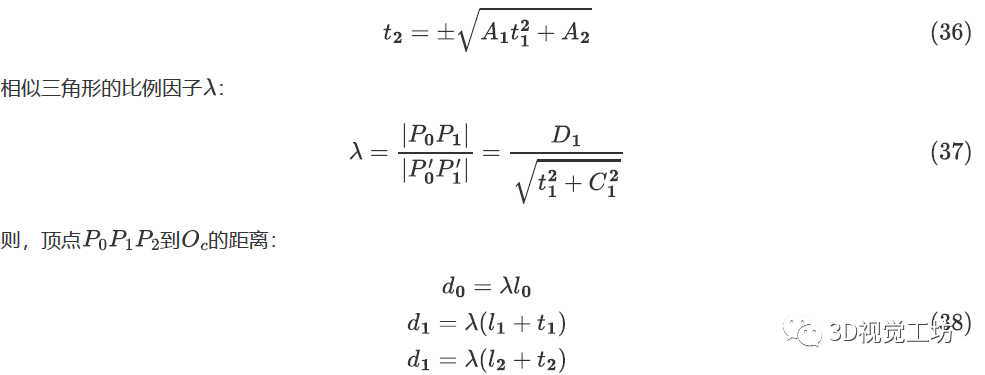
3.3获取相机的位姿

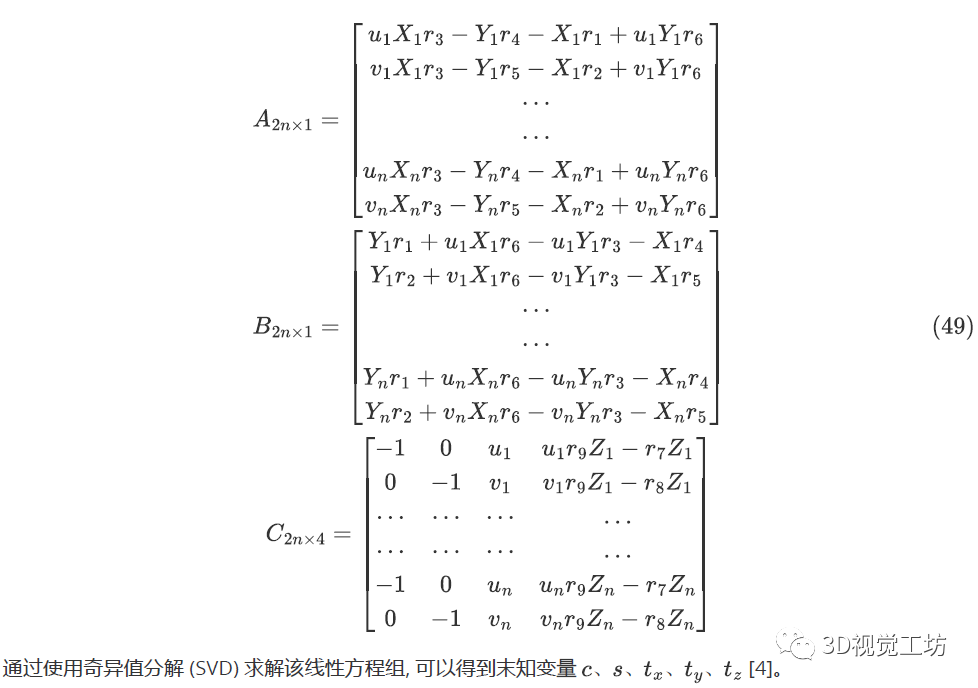
再获取到相机坐标系与新坐标系绕之间的旋转和平移矩阵,进而可直接相机坐标系与世界坐标系绕之间旋转和平移矩阵,即相机的位姿。
审核编辑:郭婷
-
PNP传感器的功能和结构2024-09-13 2892
-
切削刀具的基本几何结构2023-06-15 3634
-
[源代码]Python算法详解2023-06-06 749
-
算法篇(PID详解)2020-05-19 4257
-
详解快速傅里叶变换FFT算法2020-03-28 2428
-
环视SAR成像处理中的几何失真校正算法2018-03-13 8302
-
一种几何图形结构描述模型2017-12-21 918
-
基于几何变换的MAGA混合智能算法2017-12-06 761
-
PID算法详解2016-12-17 1218
-
SVPWM的原理推导和控制算法详解2016-01-28 14474
-
图书分享:卡尔曼滤波算法的几何解释2015-06-11 13967
-
LiAl的电子与几何结构2010-01-01 1054
-
路由算法详解2009-08-06 5852
全部0条评论

快来发表一下你的评论吧 !
