

如何使用MAX20446设计LED背光驱动系统
描述
本应用笔记详细介绍了MAX20446 6通道背光高亮度LED驱动器的分步设计过程,并重点介绍了加快关键元件选择所需的计算。还讨论了组件选择的权衡。本应用笔记重点介绍升压转换器拓扑结构,相同的设计工艺可以扩展到其他LED驱动器产品。
介绍
MAX20446为峰值电流模式控制的LED驱动器,能够以几种不同的配置驱动多达6个LED串:升压、降压-升压、SEPIC和反激式拓扑。本应用笔记重点介绍LED串正向电压始终高于输入电源电压范围的升压拓扑。
MAX20446具有以下特性:
6 个集成电流输出,每个输出可吸收高达 120mA 的 LED 电流
集成扩频和相移
我2C 控制脉宽调制 (PWM) 调光和混合调光
可编程开关频率介于 400kHz 和 2.2MHz 之间。
在此 LED 背光驱动系统设计示例中,6 个 7 LED 灯串以每串 100mA 的恒定电流驱动。假设每个 LED 的最大预期正向压降为 3.3V,最小预期正向压降为 2.7V。还假设LED驱动电路由汽车电池直接供电,其典型V型在12V,但可在5V至16V范围内变化。
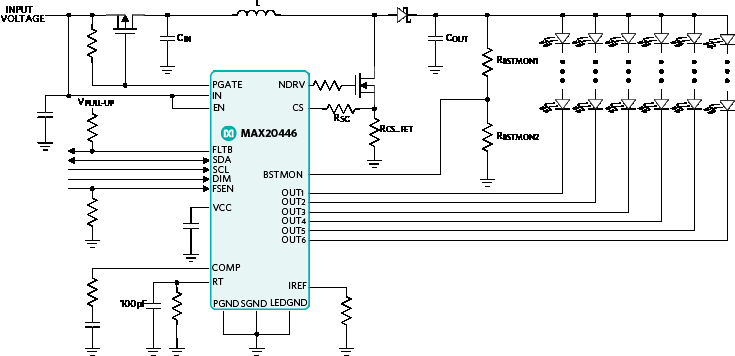
图1.MAX20446典型工作电路
电感器选择
要选择合适的电感值,请计算所需的总输出电流(I发光二极管) 使用以下公式驱动 LED:

(公式1)
我在哪里字符串是每个字符串的电流,并且 N字符串是使用的字符串数。
最大电压(VLED_MAX) 驱动 LED 串由以下公式给出:

(公式2)
其中 VOUT_MAX最大OUT_调节电压(MAX20446数据资料的电气特性为1.1V),VF_MAX是每个 LED 上的最大预期前向压降,N发光二极管是构成每个串的 LED 的数量。
最大占空比 (DMAX) 由以下公式给出:

(公式3)
其中 VLED_MAX是 LED 串的正向电压,单位为 V,VD是整流二极管的正向压降(约0.6V),VIN_MIN是以伏特为单位的最小输入电源电压,V.CS是峰值电流检测电压,单位为伏特(应考虑可用限值的 90%),V场效应管是开关 MOSFET 导通时的平均漏源电压,以伏特为单位(最初假设为 0.1V)。
最大占空比和LED电流决定了平均电感电流(IL平均),由以下等式表示:
(公式4)
知道平均电感电流,峰值电感电流(ILP) 表示如下:
(公式5)
哪里?我L是以安培为单位的峰峰值电感电流纹波。较低的纹波电流需要更大(通常更昂贵)的电感。较高的纹波电流不仅会导致更高的开关损耗,而且还需要更多的斜率补偿和更大的输入电容。如果建议的最大峰峰值纹波是平均电感电流的±30%,则?我L由以下等式给出:

(公式6)
由公式4可知,平均电感电流与输出电流成正比,并且由于电感纹波电流,?我L,与输出负载电流无关,电感电流的最小值和最大值精确地跟踪电感器电流的平均值。 基于此,公式5可以改写如下:

(公式7)
最后,最小电感值(L最低) 在亨利斯中由以下等式表示:

(公式8)
其中 f西 南部是所需的开关频率,以赫兹和 L 为单位托尔是应用于电感标称值的容差参数。
例如,如果 f西 南部= 2.2兆赫,升托尔= 30% 和 V.CS= 0.378V,数值计算如下:

(公式9)

(公式10)

(公式11)

(公式12)

(公式13)

(公式14)

(公式15)
确定最小电感值时,必须选择尽可能接近L的实际电感值最低没有下去。使用所选电感值重新计算峰值电感电流和纹波。这些数字对于以后的其他计算是必需的。

(公式16)

(公式17)

(公式18)
确保所选电感的额定电流高于ILP.通常,电感峰值电流使用20%裕量。
输入电容选择
在升压转换器中,输入电流是连续的,因此输入电容的RMS纹波电流很低。大容量电容和ESR都会影响输入纹波。假设大容量电容和ESR的纹波贡献相等,如果铝电解电容和陶瓷电容并联使用。如果仅使用陶瓷电容器,则大部分输入纹波来自大容量电容(因为陶瓷电容器具有非常低的ESR)。使用公式19和公式20计算最小输入大容量电容和最大ESR。
(公式19)
(公式20)
哪里?VQ_IN和?VESR_IN分别是电容放电和ESR引起的输入电压纹波贡献。
假设可以容忍50mV的最大输入纹波(V的1%)IN_MIN),其中95%的输入纹波来自大容量电容,并按如下方式计算输入电容:

(公式21)

(公式22)
考虑到电容标称值的容差为20%,使用4.7μF电容可实现0.98μF的最小大容量电容。确保所选电容器在工作直流电压下满足最小大容量电容要求(电容会随着陶瓷电容器电压的变化而大幅降低)。
介电材料应为X7R或更好。否则,电容器可能会因直流偏置或温度而损失大部分电容。如果输入电压有噪声或满足电磁干扰(EMI)要求,也可以增加总电容值。
输出电容器选择
在升压转换器拓扑中,输出电容在开关 MOSFET 导通时提供负载电流。输出电容的功能是将转换器输出纹波降低到可接受的水平。整个输出电压纹波出现在恒流灌电流输出端,因为LED串电压由于恒定电流而稳定。
输出电容的ESR、ESL和大容量电容会影响总输出电压纹波。在大多数应用中,使用低ESR陶瓷电容器可以显著降低输出ESR和ESL效应。为了降低ESL和ESR效应,并联多个陶瓷电容器以实现所需的大容量电容。为了在PWM调光期间衰减可闻噪声,通常将输出端的陶瓷电容器数量降至最低。
在这种情况下,额外的电解或铝有机聚合物电容器提供大部分大容量电容。或者,也可以使用低噪声陶瓷电容器。
使用以下公式确定升压输出端的最小大容量电容:

(公式23)
哪里?VQ_OUT是电容器放电引起的输出电压纹波贡献。
额外的输出电压纹波贡献(?VESR_OUT) 来自输出电容 ESR,其公式由下式给出:

(公式24)
将峰峰值输出电压纹波限制在50mV,以获得稳定的输出电流。假设大容量电容占纹波贡献的95%,并使用公式23和公式24计算以下值。

(公式25)

(公式26)
并联使用三个 4.7μF 陶瓷电容器以超过 4.65μF 的最小输出电容,因为所选电容器必须满足工作电压下的最小大容量电容要求。
过压保护
如果任何 LED 串断开,DC-DC 转换器输出电压将增加以达到所需的 LED 电流。过压保护门限通过连接在转换器输出、BSTMON 输入和 GND 之间的分压器网络来限制输出电压。如果 BSTMON 电压超过 1.23V,NDRV 被强制为低电平,这将关闭开关 MOSFET 并防止升压输出电压增加。
DC-DC转换器输出端的过压保护门限由下式确定:

(公式27)
其中1.23V(典型值)是BSTMON的过压门限。
VBSTMON是升压转换器可以产生的最大电压,应大于预期的最大 LED 灯串电压 (VLED_MAX) 根据以下不等式:

(公式28)
其中因子 1.1 考虑了 10% 的保证金。
最小预期 LED 灯串电压 (VLED_MIN) 由以下等式表示:

(公式29)
其中 VOUT_MIN= 0.7V。
如果在启动期间发生欠压,升压转换器将闭锁。为避免升压转换器闭锁,BSTMON 引脚上的电压必须始终大于 0.6V。这导致 V 之间的以下关系BSTMON和 VLED_MIN:

(公式30)
公式28和公式30中的不等式可以组合起来得到以下结果:

(公式31)
选择 R 的值BSTMON1和 RBSTMON2使输出电压不超过其绝对最大额定值(52V),同时遵守公式31。通过选择 RRBSTMON1= 226k?和 RBSTMON2= 10k?,获得 VBSTMON 的以下值:

(公式32)
斜率补偿和电流检测电阻选择
MAX20446为电流模式控制的LED驱动器,这意味着电感电流信息被反馈到环路中。
在占空比大于50%且电感电流连续(即始终大于零)时,负载瞬态会导致次谐波振荡和环路不稳定,而无需斜率补偿。为了保持环路稳定,电阻(R南卡罗来纳州) 必须从 CS 添加到开关 MOSFET 的源极。在MAX20446内部,有一个电流源,通过R提供小的斜坡电流。南卡罗来纳州在斜率补偿电阻(V南卡罗来纳州).该电压与FET检流电阻两端的电压R相加CS_FET,并将结果与基准电压(即 COMP 引脚上的电压)进行比较。
因为 RCS_FET如果开关MOSFET电流和斜率补偿电流流过它,CS引脚上的总电压由以下公式表示:

(公式33)
斜率补偿电压定义如下:

(公式34)
为了保持稳定性,所需的最小斜率补偿电压速率由以下公式表示:

(公式35)
我在哪里L_UPSLOPE和我L_DOWNSLOPE表示如下:
(公式34)

(公式36)
因此,VSC_MIN和 RSC_MIN由以下等式定义:

(公式37)

(公式38)
这包括 1.5 倍以提供足够的保证金。
回顾公式33,R的最小值CS_FET电阻通过求解以下公式得到:

(公式39)
其中0.39V是峰值电流检测门限电压的最小值。电流检测门限还包括斜率补偿组件。将0.39V的最小电流检测门限乘以0.9,以考虑容差。
RCS_FET然后用以下等式表示:

(公式40)
根据规定的设计规范,R 的值CS_FET和 R南卡罗来纳州计算方法如下:

(公式41)

(公式42)
RCS_FET选择= 75mO,这是最接近的低值标准电阻。
R南卡罗来纳州= 2.7k?为此应用程序选择。
开关场效应管选择
外部开关MOSFET的额定电压应足以承受最大输出电压和整流二极管正向压降之和,如下式所示:

(公式43)
开关 MOSFET 的额定值也应能够处理最大 RMS 电流:

(公式44)
我在哪里数字版权管理系统是开关 MOSFET 的漏极 RMS 电流(以安培为单位),包括系数 1.3 以考虑 30% 的裕量。
对于此示例应用程序,所需的 VDS_FET_ABS_MAX和我数字版权管理系统计算方法如下:

(公式45)

(公式46)
MOSFET 的导通电阻 (R德森) 与额定电流有关,会影响升压转换器的效率,因为它决定了器件的阻性功率损耗。它越高,转换器的整体效率越低。使用以下公式计算阻性功率损耗:

(公式47)
给定总输出功率(P外)和估计的整体LED驱动器效率(?)为90%,PLOSS_TOT值可以按如下方式获得:

(公式48)

(公式49)

(公式50)
R型DSON_MAX值,限制 PLOSS_RDSON对整体效率的影响为1%,可以使用以下公式确定:

(公式51)

(公式52)
另一个考虑因素涉及栅极电荷,因为栅极驱动器必须提供该电荷才能打开和关闭MOSFET。电荷越小越好,开关速度也很重要,但相似电流、导通电阻和额定电压的MOSFET之间没有显著变化。
安森美半导体NVTFS5C471NL N沟道MOSFET的特性适用于此应用。®
整流二极管选择
整流二极管可能是导致整体功率损耗的主要原因。选择具有低正向压降的肖特基二极管,该二极管的额定值可处理平均LED电流。使用以下公式确定整流二极管所需的额定电流:

(公式53)
其中保证金包括系数 1.2。
使用先前计算的 IL 值平均= 3.158A 和 D.MAX= 0.81,整流二极管需要处理0.72A的正向电流,如公式54所示。

(公式54)
还要确保肖特基二极管的反向电压额定值比 V 高 20%LED_MAX,二极管两端的最大预期反向电压。
肖特基二极管最明显的局限性是其相对较低的反向电压额定值和相对较高的反向漏电流。对于金属硅肖特基二极管,反向电压通常为50V或更低。反向漏电流随温度升高而增加,这会导致热不稳定问题,这通常会将有用的反向电压限制在远低于实际额定值的水平。
根据计算结果选择安森美半导体NRVBS260T3G肖特基二极管。
误差放大器补偿
图2显示了采用连续电感电流工作的电流模式升压转换器的通用开环配置。
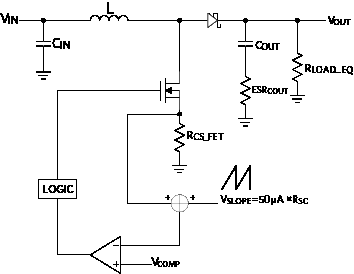
图2.通用电流模式升压转换器开环配置。
在MAX20446 LED驱动器中,RLOAD_EQ替换为

.传递函数 A(s) 由以下等式给出:

(公式55)
其中人工补偿斜坡斜率(S一个)、电感斜率(SN), fZ1, fRHPZ和 f小一用以下等式表示:
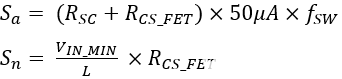
fRHPZ是右半平面 (RHP) 零点所在的最坏情况频率。RHP 零点不同于传统的左半平面 (LHP) 零点。RHP零点不是升压相位,而是进一步滞后相位,从而降低相位裕量并导致环路不稳定。
如果在转换器输出端使用ESR几乎为零的陶瓷电容器,则fZ1可以忽略不计,因为它向高频偏移,并且很可能超出转换器的带宽。
主导极点的 f小一由于升压的影响,频率是普通极点频率的两倍。 环路补偿由所谓的II型跨导放大器保证,该放大器表征闭环响应(B(s)).图3显示了带有外部补偿元件的基本II型跨导放大器电路。
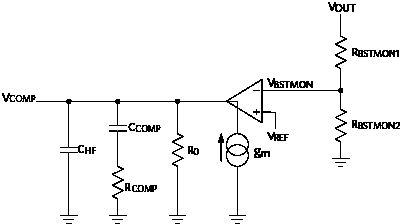
图3.用于环路补偿的II型跨导放大器。
假设 R0>>·比较和 C比较>> C高频,图3的B(s)传递函数可以写成如下:

(公式56)
其中 A虚拟机是中频带电压增益和gM是误差放大器的跨导。AVM 表示如下:

f玉蜀黍属和 f豌豆表示如下:
LED驱动器的闭环响应为A×B。
环路补偿的目标是确保环路增益大于0dB(以及足够的相位裕量)的相移小于180度。误差放大器由于C的积分效应而增加了一个零频极点比较,这允许以-20dB/十倍频程的斜率将环路增益滚降至0dB(在主极点之后,远在RHP零点的影响之前)。
建议闭环增益交越频率fC,限制为至少 f 的五分之一RHPZ以获得高于 45 度的可接受相位裕量。补偿零点,f玉蜀黍属,应放置至少目标交越频率的五分之一,约为 1/25 FRHPZ.
将总环路增益固定在f第 1 页使总环路增益在 1/5 f 时越过 0dB,斜率为 -20dB/十倍频程RHPZ,R的最佳值比较由以下表达式给出:

(公式57)
C 的值比较然后可以从 f 的定义中获得玉蜀黍属.

(公式58)
环路增益在跨越0dB之前保持在零以上的频率越高,环路响应越快,因此,负载阶跃期间的输出电压降越低。降低 R比较同时保持 F玉蜀黍属̃ fC/5,在不显著改变增益的情况下增加相位裕量,并增加输出电压在负载阶跃后建立所需的时间。
如果总输出电容的ESR很大,则f时的输出零点效应Z1不可忽略,可以通过放置误差放大器的主极点频率f 来平衡豌豆,在 f 处Z1.因此,可选的 C高频电容值表示如下:

(公式59)
该 f豌豆极点可能也是必要的,以确保增益在交越频率之后继续滚降。
根据此设计示例先前计算的值,f 的值RHPZ, f小一/ 1LOAD_EQ/ 1比较和 C比较计算方法如下:

(公式60)

(公式61)

(公式62)

(公式63)

(公式64)
选择 R 的标准商业价值比较= 4.7k?和 C比较= 18nF 对于此数值示例以计算 F玉蜀黍属如下:

(公式65)
图4和图5显示了LED驱动器闭环响应的波特图。0 dB 交叉频率 (fC) 的 10kHz 和 70 度的相位裕量 (PM)。
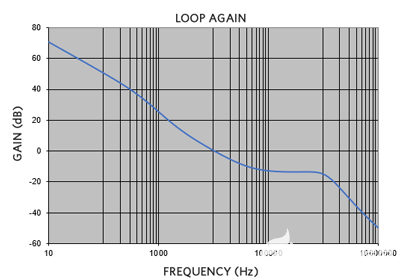
图4.环路增益。
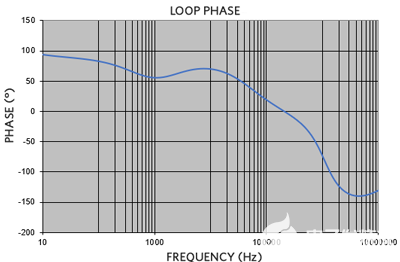
图5.循环阶段。
结论
图6显示了完整的升压LED驱动器原理图,其中包含从设计示例中选择的元件值。本应用笔记中概述的分步设计过程可用作调试和测试阶段的参考。
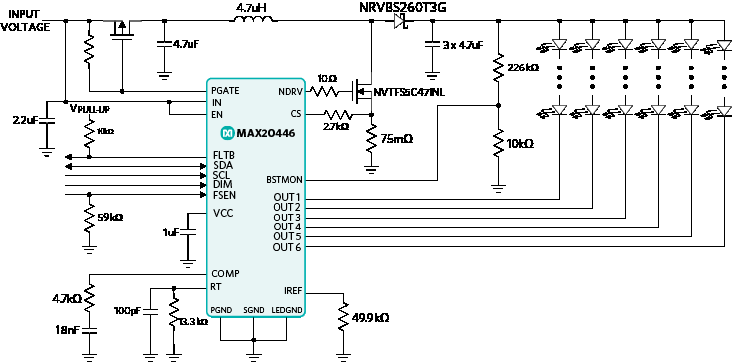
图6.MAX20446典型工作电路基于示例计算(不包括可选的P-MOS和相关偏置电阻)。
审核编辑:郭婷
-
MAX20070B:集成TFT电源与LED背光驱动的解决方案2026-01-30 376
-
如何使用 MAX20446 设计 LED 背光驱动系统2022-11-16 238
-
通用led背光驱动器设计2022-08-18 958
-
基于RGB-LED的背光驱动系统该如何去设计?2021-06-07 1612
-
LED背光驱动模块电路设计2014-09-24 6312
-
RGB LED背光驱动电路实例2011-05-20 4875
全部0条评论

快来发表一下你的评论吧 !
