

简单介绍三种扫地机器人的BMS拓扑
描述
扫地机器人的电池包,目前主流则为4串。根据不同的需求,可以将扫地机器人电池组的BMS拓扑分为三类:电量计型,模拟前端+MCU型,硬件保护型。下面分别对这三种BMS拓扑进行介绍。
1、电量计型
如图1所示为电量计型BMS拓扑示意图。仅电量计单颗芯片,结合电流采样电阻,保护开关构成电池包。该方案的优点是使用单颗芯片即可实现电量计算,电池监控以及保护。
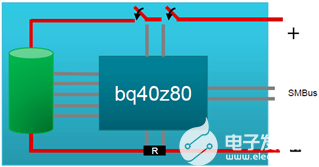
图1. 电量计型BMS拓扑
2、模拟前端+MCU型
图2所示为模拟前端+MCU型BMS拓扑示意图。该拓扑与电量计型类似,只是将电量计替换为模拟前端和MCU。该拓扑和电量计型拓扑相比,该方案不再自带电量计算功能,但仍可通过MCU结合电压电流采样数据进行电量计算,电量精度取决于采样精度和电量算法。
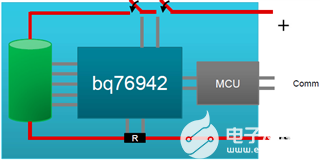
图2. 模拟前端+AFE型BMS拓扑
3、硬件保护型
图3所示为硬件保护型BMS拓扑示意图。仅由保护IC,结合电流采样电阻,保护开关构成电池包。该方案的优点很明显: 简单,价格便宜。但缺点同样明显: a. 功能有限,仅支持保护功能,并且保护值不可配置,灵活性较差; b. 不具备电量计算功能,需要主机端额外具备电量计算能力。因此该拓扑更适合应用于低成本或者主机侧能力较强的场合。
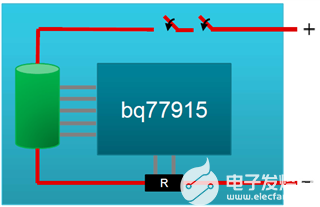
图3. 硬件保护型BMS拓扑
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
电机驱动的扫地机器人介绍2022-11-09 2607
-
吸尘器/扫地机器人电池组的BMS拓扑介绍2022-11-04 1603
-
典型吸尘器/扫地机器人BMS拓扑2022-10-28 930
-
扫地机器人自动回充的技术原理是什么2021-09-14 5595
-
智能扫地机器人用什么马达2018-10-12 7080
-
如何选择好的扫地机器人2018-08-20 4602
-
智能扫地机器人解决方案2017-05-27 8805
-
扫地机器人怎么制作2017-01-12 7850
-
小米扫地机器人上手:家居能手2016-09-28 8346
-
原来扫地机器人是这样工作的!2015-12-24 31562
-
【NanoPi2申请】扫地机器人2015-12-02 3601
-
扫地机器人方案2015-05-18 10619
-
扫地机器人如何选购?2015-01-21 7851
-
扫地机器人十大排名!了解扫地机器人哪个牌子好2015-01-20 10628
全部0条评论

快来发表一下你的评论吧 !
