

STM32实现:步进电机的速度控制
工业控制
描述
项目需求
在制作一个使用全向轮的机器人底盘,对于全向轮,电机的精度是影响效果的重要因素。所以使用了步进电机,使用步进电机的优点是可以不使用编码器,开环控制即可达到高精度的效果。
调整占空比或者调整周期
众所周知,PWM有两个重要参数,周期与占空比。 步进电机的运动方式是,每收到一个脉冲,就旋转指定的角度。因此影响电机速度的唯一参数就是PWM的频率。以下附图两张来说明调整占空比与调整周期的区别。
周期固定,调整占空比
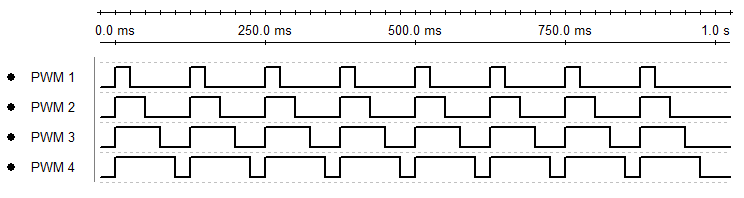
上图中有4个PWM,它们的周期是一样的,不同之处是拥有从80%至20%的占空比。可以看出,无论占空比为多少,在1s内,它们产生的高电平的数量是一样的,即无论占空比为多少,PWM的频率都一致。因此也就无法调整步进电机的速度。因为步进电机的速度仅与PWM的频率有关。
占空比固定,调整周期
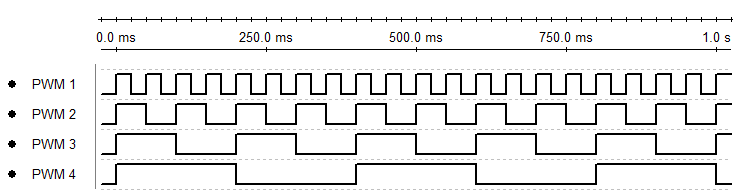
上图中有4个PWM,它们的占空比都固定为50%,却拥有不同的周期。可以看出,即使占空比固定,只要动态调整周期,PWM就能在相同时间内产生数量不同的脉冲。因此,固定占空比,动态调整PWM周期,即可达到控制步进电机速度的效果。
基于STM32的实现
在STM32F1中,定时器具有PWM模式,可以用来产生PWM。相关文章:STM32中PWM的配置与应用详解。但是,STM32的PWM模式,只要确定了时基单元(即确定了PWM周期),改变输出比较寄存器,仅可改变PWM的占空比。 若需要改变PWM周期,需不停地改变定时器的时基单元。但时基单元与硬件相关,不适合频繁变更。因此,步进电机的调速,不适合使用STM32下定时器的PWM模式来控制。 在多方查找资料后,确定了一种利用输出比较精确控制PWM周期的方式。
利用输出比较产生频率可变的PWM
利用输出比较产生频率可变的PWM,原理简单介绍如下: 首先配置定时器时基单元,确定脉冲最小长度单位CK。
然后开启定时器的输出比较,设置模式为翻转模式,并开启输出比较中断。
将定时器内计数器CNT当前值,加上脉冲长度X(单位为CK),写入输出比较寄存器。
在X个CK后,将会触发输出比较中断。同时电平翻转。
在中断中再次将当前计数器CNT的值,加上脉冲长度X,写入输出比较寄存器。
在X个CK后,将会触发输出比较中断。同时电平翻转。
在中断中再次将当前计数器CNT的值,加上脉冲长度X,写入输出比较寄存器。
如此往复…… 以此即可得到一个占空比为50%,周期为2X个CK的PWM。
确定最小单位CK,配置时基单元
首先确定一个最小的间隔CK,规定PWM的高电平长度和低电平长度的单位都是CK。 即高电平的长度一定是CK的整数倍。低电平亦然。 然后配置定时器的时基单元,通过CK的长度确定预分频系数。 已知STM32F103的主频为72MHZ,则时基单元中预分频系数为:
PSC = 72M / (1/CK)例如,rtz所确定的CK长度为10us(0.00001s),即可得出方程。
TIM_TimeBaseStructure.TIM_Period = 0XFFFF; TIM_TimeBaseStructure.TIM_Prescaler =720; TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
开启输出比较通道,设置输出比较模式为翻转模式,并配置NVIC,开启输出比较中断,配置输出比较通道:
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_Toggle; TIM_OCInitStructure.TIM_Pulse = 500; TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Set; TIM_OCInitStructure.TIM_OCNIdleState = TIM_OCIdleState_Reset; TIM_OC1Init(TIM2, &TIM_OCInitStructure);开启输出比较中断,配置NVIC优先级:
TIM_ITConfig(TIM2, TIM_IT_CC1, ENABLE); NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_Init(&NVIC_InitStructure);
编写中断服务函数
在输出比较中断中,唯一要做的事情就是把当前CNT的值取出,加上脉冲长度X,写入输出比较寄存器。 当计数器达到0XFFFF(之前设定的重装载值)后,再加一会自动变为0。 例如,当前CNT值为0XFFFF,脉冲长度为5,很明显,输出比较寄存器应设置为0X0004才可触发下一次中断,而不是0X10004,这样会造成溢出。 因此将CNT的值与脉冲长度相加后,需要取0XFFFF的余数后,再写入输出比较寄存器。
int t_m=5;//低电平和高电平的长度
void TIM2_IRQHandler(void)
{
if (TIM_GetITStatus(TIM2, TIM_IT_CC1) != RESET) {
TIM_SetCompare1(TIM2,(TIM2->CNT+t_m)%0XFFFF);
TIM_ClearITPendingBit(TIM2, TIM_IT_CC1);
}
}
动态调整中断服务函数中的变量t_m,即可达到修改PWM频率的效果。
编辑:黄飞
-
步进电机的速度控制2016-01-11 7062
-
基于Stm32F407的多路步进电机速度控制函数2021-06-29 1970
-
stm32控制步进电机加速度2021-07-08 1487
-
基于STM32的步进电机转速控制实验设计2017-09-28 1879
-
基于ARMCortex_M3的步进电机线性速度控制的实现2017-09-29 957
-
基于STM32的步进电机控制系统2017-11-27 4444
-
使用PLC如何控制步进电机的速度与方向2020-02-16 24061
-
基于STM32的步进电机速度控制2020-09-23 12589
-
基于DSP的步进电机速度控制系统2021-06-07 2579
-
基于STM32的步进电机驱动设计2023-03-16 1220
-
STM32实例之步进电机的速度控制2023-03-22 739
-
STM32实现四驱小车电机控制任务之电机速度PID控制算法2023-05-06 1220
-
plc如何控制步进电机的速度和方向?2023-08-07 3495
-
步进电机控制器怎么调速度2024-06-12 7158
-
步进电机的控制实现方法2025-01-21 3220
全部0条评论

快来发表一下你的评论吧 !
