

机器人通过外部零点标定进行零点复归测试
描述
KSS15066
调零开关处电平出乎意料地低
原因: 参考点开关脏污
解决方案: 清洁参考点开关
如未进行零点复归测试,参考点开关至少被触发 5 分钟,因参考点开关的接近开关表面脏污,例如金属粉尘或焊渣。
原因: 零点复归测试的输入端配置错误
解决方案: 更改安全配置
原因: 参考点组未示教
解决方案: 示教参考点组
参考点组未示教。必须针对参考点组示教下列点:
• 运动至参考点开关
• 参考位置
• 离开参考点开关
原因: 参考点开关安装错误或移位
解决方案: 重新安装或校准参考点开关
未进行零点复归测试,参考点开关被触发至少 5 分钟。参考点开关安装在错误的位置上或被移动。
1. 接近参考点位置。
2. 检查参考点开关的两个接近开关表面是否被按键触发(触发板或工具)。
安装并调整参考点开关,使机器人到参考点位置时同时触发参考点开关的两个接近开关表面。
原因: 参考点开关损坏
解决方案: 更换参考点开关
未进行零点复归测试,参考点开关被触发至少 5 分钟。参考点开关损坏。
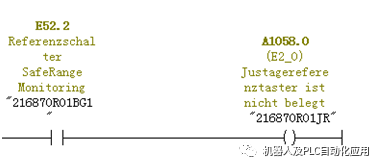
相关变量:
$MasteringTest_Switch_OK
检查参考开关的功能
TRUE =参考开关正常。
FALSE =参考开关故障。
默认值:TRUE
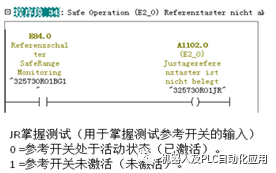
$MasteringTest_Active
掌握测试的状态
TRUE =参考测试处于活动状态。
FALSE =没有参考测试处于活动状态。
$MasteringTest_Group
参考组号当前在参考位置
0:参考位置中没有参考组
1 ... 3:该编号在参考位置的参考组
VASS标准的KUKA安全机器人安全归零程序:
开始安全寻参
LIN VB=200[mm/s] VE=0% ACC=100% RobWzg=5 Base=0 SPSTrig=0[1/100s] P
......
4: Tech_ SafeRobot JustageschalterGruppe 1 aktivieren EIN开始安全寻参
......
VW_USR_R (#USR_ADV,109,31,1,1,1,1,1,TRUE)
结束安全寻参
LIN VB=200[mm/s] VE=0% ACC=100% RobWzg=5 Base=0 SPSTrig=0[1/100s] P
......
3: Tech_ SafeRobot Justageschalter deaktivieren EIN结束安全寻参
VW_USR_R (#USR_ADV,109,34,1,1,1,1,1,TRUE)
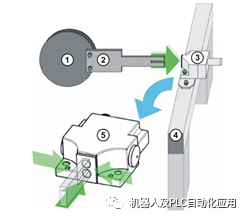
参考点位置必须根据以下标准进行选择:
• 参考点开关的位置和触发板不会妨碍机器人的工作。
• 轴在参考点位置处不得彼此位于奇点内。
• 参考点开关的两个接近开关表面在参考点位置处由触发面触发(触发板或工具)。
• 同一个参考点组中的所有轴位于参考点位置,以便触发参考点开关。
• 机器人轴在参考点位置处距零点标定位置至少有 ±5°(旋转轴)或±15 mm(线性轴)。
• 参考点开关的位置位于机器人运动范围内。
在参考点位置与参考点开关的间距最大允许为 2 mm。若间距更大,则参考点开关不会触发。
通过外部零点标定进行零点复归测试
如果已配置通过外部零点标定进行零点复归测试,则无法使用安全配置中保存的参考点位置验证零点标定。没有用于执行零点复归测试的 KRL 程序。
系统集成商必须检查本身作为安全功能组成部分的上级控制系统中的零点标定,并通过机器人控制系统的安全输入信号确认已成功执行的零点复归测试。
为了通过上级控制系统进行外部零点标定确认,配置了安全输入端 EJB(外部零点标定确认)。通过以下接口可提供 EJB 信号:
• 以太网安全接口
• 可与安全接口 X13 组合使用的接口 X42
如要确认零点标定,必须在输入端 EJB 上生成一个正脉冲。脉冲必须至少为350 ms 长,允许最长为 5 s。当 EJB 信号从“逻辑 0”切换为“逻辑1”,并且在该时间段内重新切换回“逻辑 0”时,零点复归测试已成功确认。
是否需要确认零点标定,可由上级控制系统通过安全输出信号 RR(机器人已回参考点)和 SO(安全选项已激活)确定。
如果安全输出端 RR 为“逻辑 0”,则需要确认零点标定。然而,输出端 RR在以下情况下也为“逻辑 0”:
• 机器人控制系统已关闭或尚未完全启动(准备就绪)。
• 安全选项未激活,因为安全监控已关闭。
建议另外测试安全输出端 SO(安全选项已激活)。在使用以太网安全接口时,也可以测试安全输出信号 PSA(安全接口已激活)。如果安全输出端 SO或 PSA 为“逻辑 1”,则安全输出端 RR 的状态也有效。
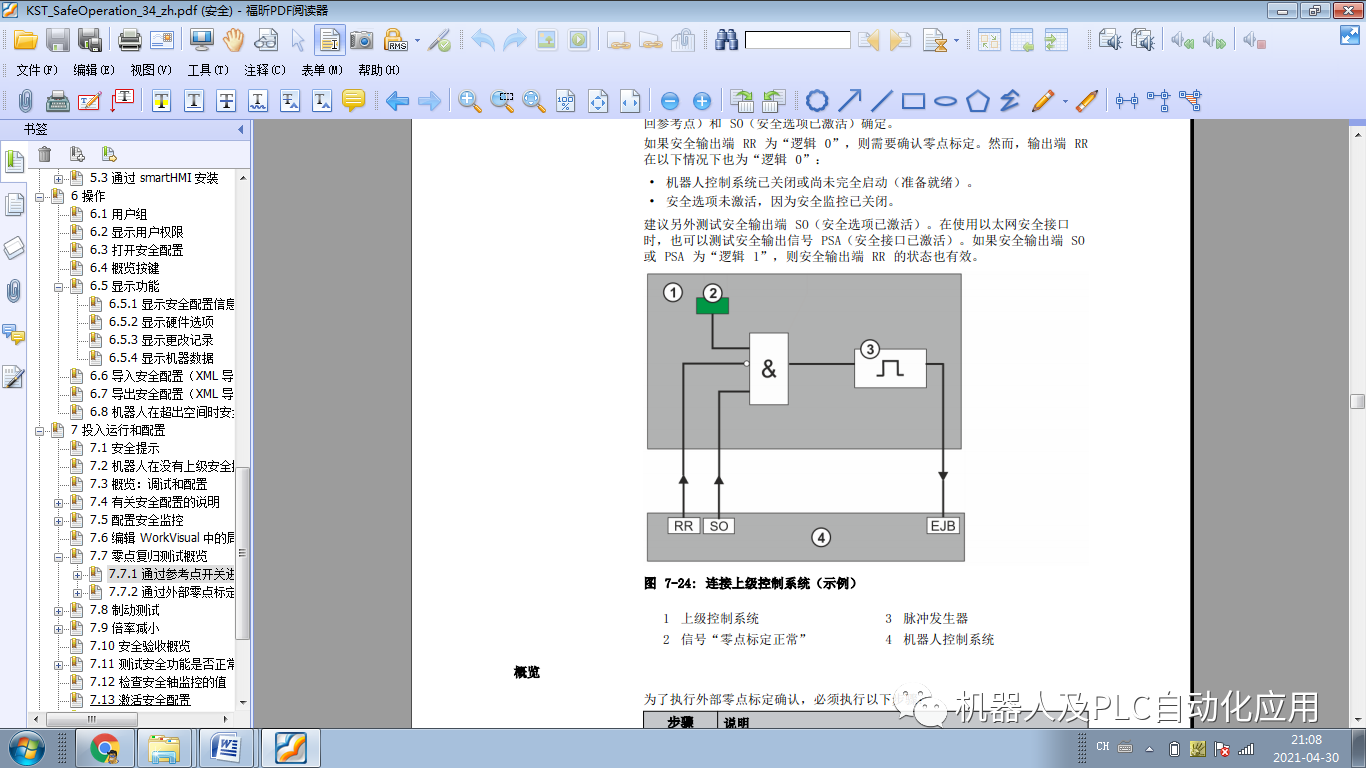
1 上级控制系统
2 信号“零点标定正常”
3 脉冲发生器
4 机器人控制系统
为了执行外部零点标定确认,必须执行以下步骤:
1 定义参考点位置并将其保存在上级控制系统中。
2 在机器人控制系统要求进行零点复归测试时驶至参考点位置(通过一个需要单独编制的 KRL 程序)。
3 将机器人和附加轴的实际位置与上级控制系统中保存的参考点位置作比较并检查位置是否一致。
4 如果位置调整成功,则通过上级控制系统确认零点复归测试:将安全输入端 EJB 上的确认脉冲发送至机器人控制系统。
5 如果位置调整失败,则机器人不得继续移动:在机器人控制系统方面通过上级控制系统采取合适的措施,例如撤销运行许可。
外部零点标定确认的信号波形:
显示的信号波形针对以下情况:
• 安全输出信号 RR 由上级控制系统进行评估。
• 机器人口控制系统要求零点复归测试。信号 RR 从“逻辑 1”切换至“逻辑 0”。
• 上级控制系统通过 EJB 脉冲信号确认已成功执行的零点复归测试。
• 信号 RR 从“逻辑 0”切换至“逻辑 1”。显示信息 零点复归测试已成功完成。
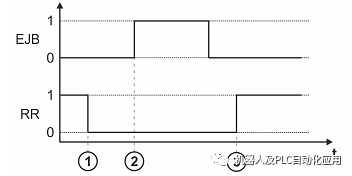
1 要求零点复归测试。
2 外部零点标定确认开始。
3 已确认零点复归测试成功执行。
审核编辑:刘清
-
如何进行零点补正?螺旋测微器的原理是什么?2023-10-26 6776
-
什么是零点漂移?如何抑制零点漂移?零点漂移怎么解决?2023-09-19 24866
-
电磁流量计检定中的流量零点和电流零点,你知道吗2023-07-24 2470
-
KUKA C4机器人零点校正V4.8版2023-04-14 2535
-
机器人视觉零点标定操作的具体操作流程2023-02-16 5779
-
KUKAC4机器人零点校正详细步骤2022-12-12 12420
-
运行的机器人遭遇突然停电,如何找回零点?2021-02-12 11433
-
KUKAC4机器人零点校正2020-06-12 4831
-
差压式液位计为什么要进行零点迁移2019-11-29 16276
-
如何通过视觉来恢复机器人的零点位置2019-08-28 2366
-
零点标定的情况与机器人零点标定方法2017-09-19 3375
-
零点检测电路2009-04-24 1403
-
电桥零点补偿电路2009-01-31 2790
全部0条评论

快来发表一下你的评论吧 !
