

某卫星天线驱动用步进电机性能仿真分析
描述
作者:杨健康1 石宏顺1 朱志能1 刘景林2
摘 要:
对步进电机优化研究的必要性、特点进行了阐述,并详细介绍了步进电机的设计方法。以某卫星天线驱动用步进电机为基础,分析了不同的转子结构、电磁参数对步进电机性能的影响,并进行了性能优化研究。
0 引言
以往关于步进电机的研究主要针对不同的定子齿形、转子齿形(方形齿、梯形齿)对电机性能的影响[1-2]。然而,对于步进电机而言,不同的转子结构、磁钢厚度等参数也会对性能产生很大的影响,而在这两方面所能参考的文献较少。因此,本文以某型卫星天线驱动用步进电机为例,通过使用ANSYS进行有限元分析计算,研究不同的转子结构型式对混合式步进电机的静转矩形成的影响,为后续步进电机的性能优化提供了一定的参考。
1 混合式步进电机工作原理
步进电机的定子分成偶数对磁极,每个磁极上有小齿及控制线圈;线圈提供电流通路;大极上的小齿与转子进行能量转换,使转子步进式旋转。转子由环形磁钢及两段铁芯组成,环形磁钢轴向充磁,铁芯分别装在磁钢两端,所有转子铁芯上都均匀分布有小齿,但相邻两段铁芯上的小齿相互错开半个齿距。定子通电时产生的磁通与转子磁钢相互作用,产生电磁力矩;电机每改变一次通电状态,转子就转过一个步距角(图1);当通电状态的改变完成一个循环时,转子就转过一个齿距。
2 有限元分析法
以往由于计算机资源的限制,文献[3]提出先对步进电机进行二维等效处理,再进行二维有限元分析。然而,对于混合式步进电机而言,转子中有永磁体,存在着轴向磁路,导致其磁路结果具有特殊性;在二维等效过程中会加入一些经验系数,得到的结果往往是不够精确的,与实际结果相比存在着一定的误差。基于此,本文准备使用三维有限元法对混合式步进电机进行仿真研究分析,其主要计算原理如公式(1)所示:
式中:H为磁场强度;σ为介质电导率;E为电场强度;B为磁感应强度。
JI DIAN XIN XI
3 主要电磁参数设计
3.1 转子外径
长径比计算公式如下:

式中:λ为长径比,一般长径比λ选取范围在0.4~2.0;Dro为转子外径;Lt为定子铁芯长度,为了使转子铁芯得到充分利用,在设计时定子铁芯要比转子铁芯稍微长一些。 转子外径依据公式(3)进行计算:
式中:Cm为转矩系数,通常取0.2~0.3;Mjmax为步进电机保持转矩。
3.2 定子铁芯外径

式中:βio为定子铁芯内径与外径的比值,一般在0.4~0.7范围进行选取;Dsi为定子铁芯内径。
3.3 定子铁芯长度

3.4 转子齿数

式中:Nr为转子小齿数;P为电机相数;θs为步距角。
本文电机P=2,θs=1.8°,Nr=50。
3.5 具体设计参数
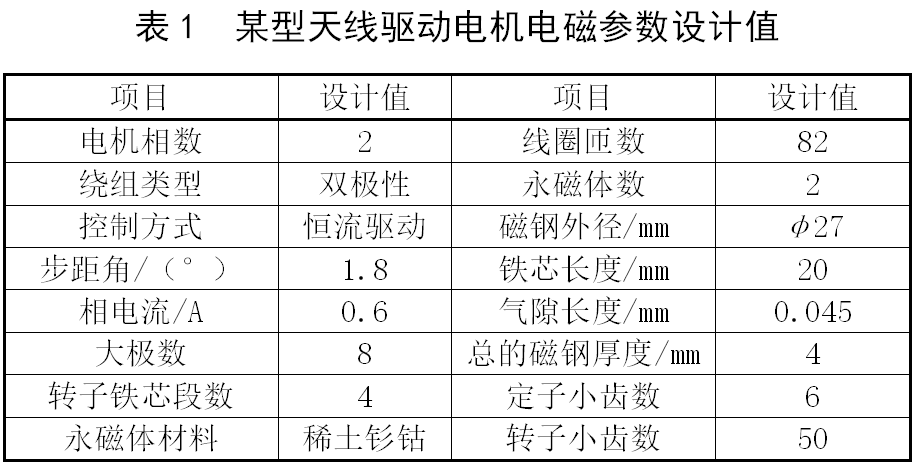
本文设计的某型天线驱动电机为两相混合式步进电机,其主要电磁设计参数如表1所示。
4 性能仿真分析
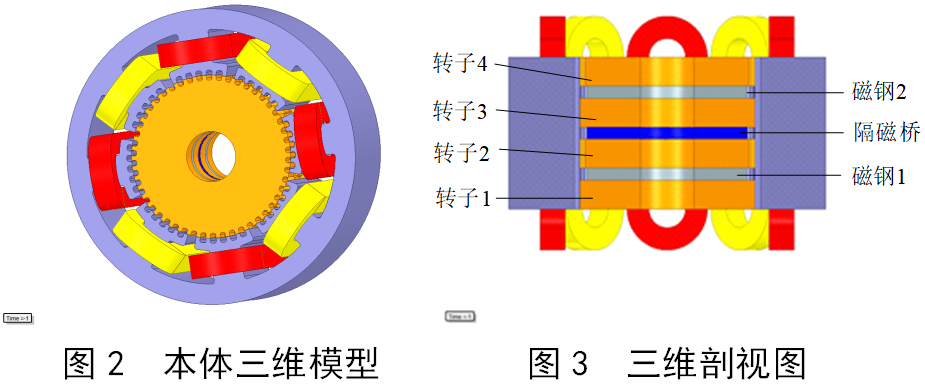
依据表1建立了步进电机三维模型,如图2、图3所示。其结构特点为定子有8个磁极,转子铁芯分为四段,相邻两段转子结构之间夹着环形磁钢并错开半个齿距,中间两段转子铁芯采用隔磁桥隔开。
通过ANSYS工具软件对建立的三维模型进行有限元仿真计算,得到了步进电机自定位转矩曲线与矩角特性曲线,分别如图4、图5所示。
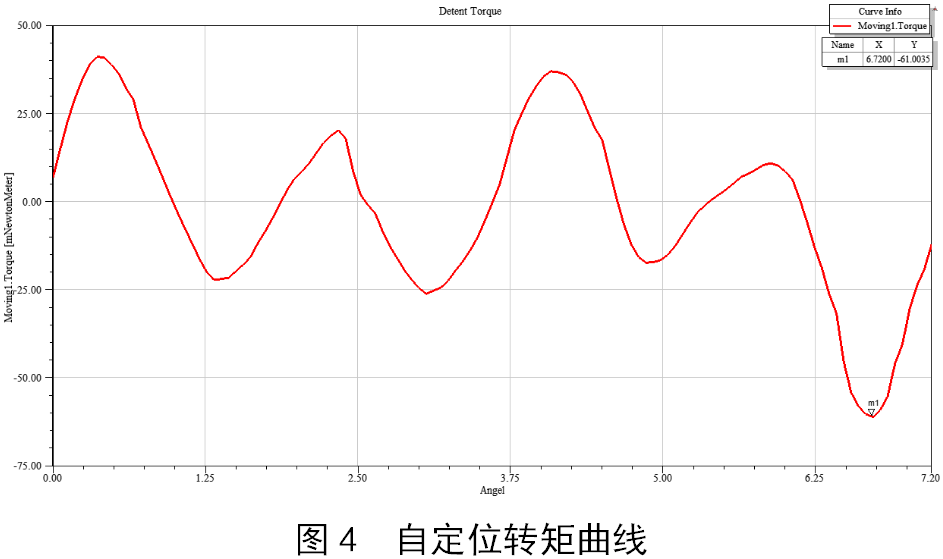
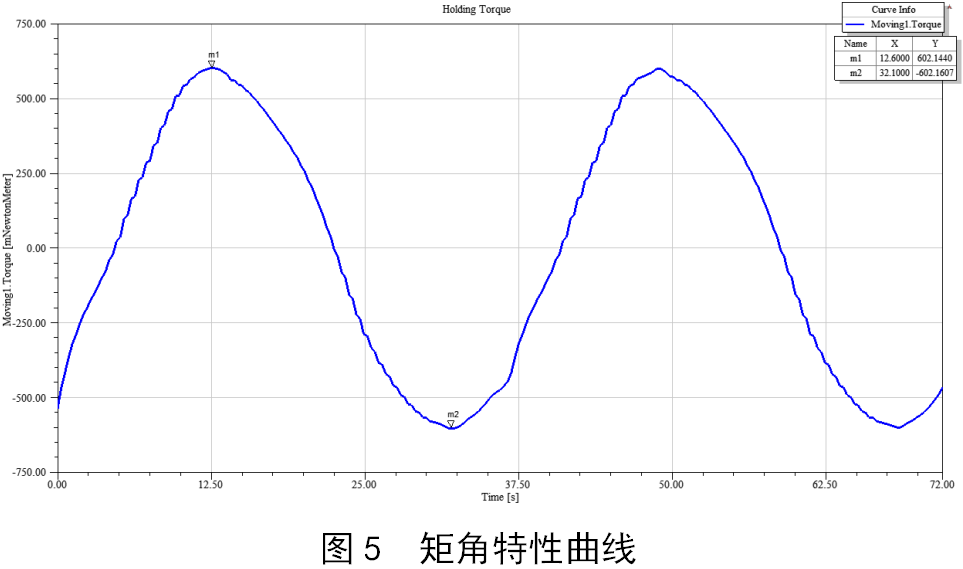
由图4可知,电机在一个齿距范围内自定位转矩峰值为61 mN·m;由图5可知,两个齿距范围内步进电机静转矩的正峰值为602.1 mN·m,负峰值为-602.2 mN·m。
5 性能优化研究
为了提高步进电机力矩密度,在小电流下,步进电机能够输出大力矩,本文以步进电机静转矩作为目标函数进行优化,通过优化设计得到步进电机静转矩的最大值。
5.1 转子结构对电机性能的影响及优化
通过只改变转子的结构,对比分析图6、图7中两种不同的转子结构对步进电机静转矩的影响。

图6是在图3的转子铁芯结构基础上,改变了中间隔磁桥厚度大小,转子铁芯长度相应变化;图7是将步进电机转子结构由四段铁芯变为两段铁芯,磁钢总的厚度大小保持不变。方案一、方案二的矩角特性仿真结果分别如图8、图9所示。
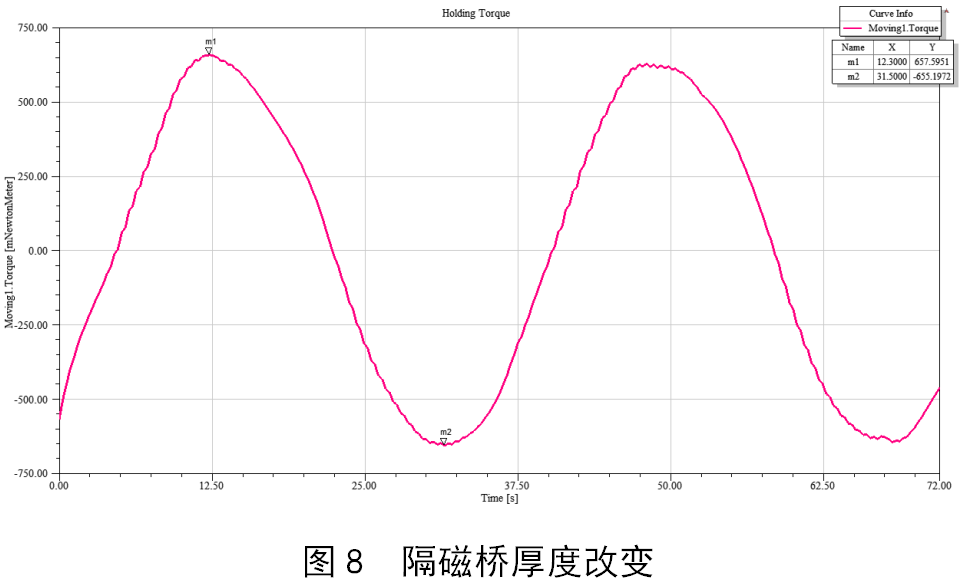
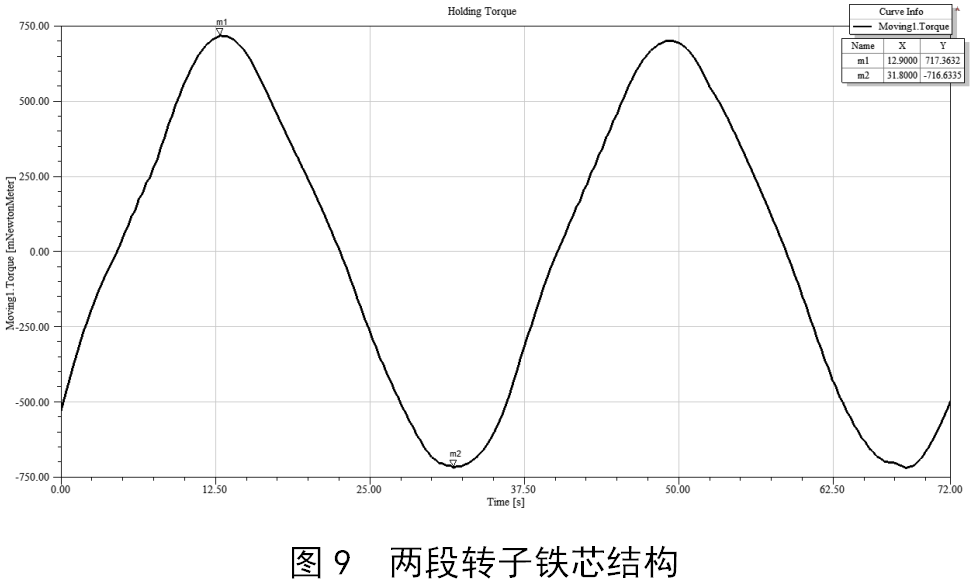
由图8可知,当隔磁桥的厚度减小后,步进电机在两个齿距范围内的静转矩正峰值为657.6 mN·m,负峰值为-655.2 mN·m;由图9可知,当转子铁芯段数减少以后,步进电机两个齿距范围内静转矩的正峰值为717.4 mN·m,负峰值为-716.6 mN·m。
相比原方案,方案一能够使得步进电机的最大静转矩增加,增加幅度为8.9%;方案二使得步进电机的最大静转矩提升更大,提升幅度约为19.1%。对比三种方案的矩角特性波形,方案二波形的正弦性最好,曲线也最为光滑。综上所述,本文决定采用方案二中的转子结构。
5.2 磁钢厚度对电机性能的影响及优化
磁钢结构对步进电机的力矩性能存在着一定的影响。在方案二的转子结构基础上,通过只改变磁钢的厚度lm,研究分析步进电机最大静转矩随着磁钢厚度变化的情况。
选取磁钢厚度分别为1 mm、1.5 mm、2 mm、2.5 mm、3 mm、3.5 mm、4 mm、4.5 mm、5 mm时的最大静转矩,得到最大静转矩随磁钢厚度lm变化曲线,如图10所示。
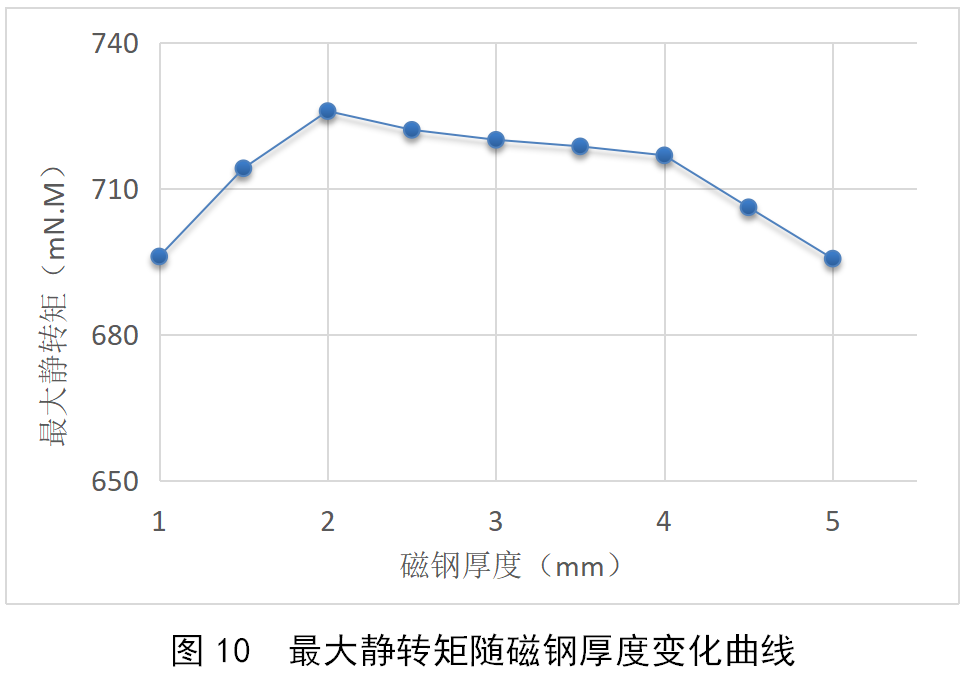
由图10可知,磁钢厚度lm存在一个最佳值。当lm=2 mm时,最大静转矩达到最大值;当lm≥4 mm时,最大静转矩开始显著降低。这是因为当磁路饱和时,继续增加永磁体厚度,增磁侧由于磁路饱和,正力矩增幅减小,去磁侧由于磁路不饱和,负力矩值变大,导致总的合成力矩变小。综上所述,优化后的磁钢厚度选为2 mm。
5.3 铁芯迭长对电机性能的影响及优化
为研究不同的铁芯迭长对步进电机性能的影响,在磁钢尺寸不变的情况下,本文选取铁芯迭长分别为15 mm、19 mm、23 mm、25 mm、27 mm、31 mm、35 mm时的最大静转矩,得到了其随铁芯迭长变化曲线,如图11所示。
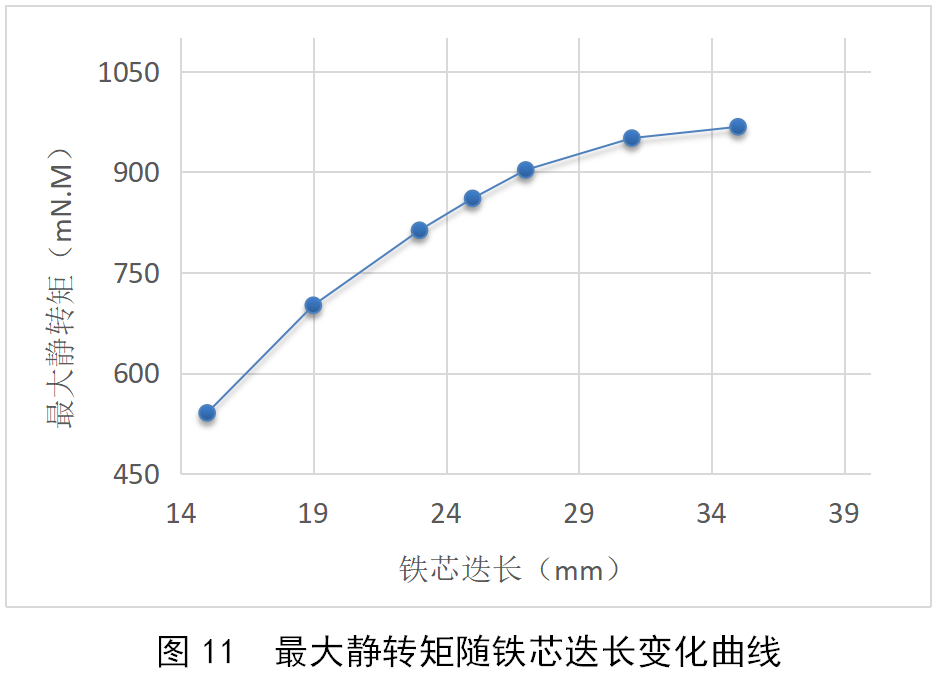
由图11可知,步进电机单位铁芯长度所产生的转矩并不是随铁芯迭长的增大而保持恒定的。这是因为虽然铁芯迭长不断增加,但永磁体的尺寸是保持不变的,导致由永磁体提供的轴向磁通有限,当铁芯迭长超过一定值后,转矩增加的幅度开始减少,转矩值逐渐趋于平稳。
铁芯长度越大,步进电机的最大静转矩也就越大,但对应的铁芯重量也会相应增加。在太空应用环境中,小体积、轻量化设计是必须优先考虑的,铁芯迭长选取时应考虑电机的性能并兼顾安装尺寸与重量要求,基于此,本文的步进电机铁芯迭长选取25 mm。
5.4 优化前后参数对比
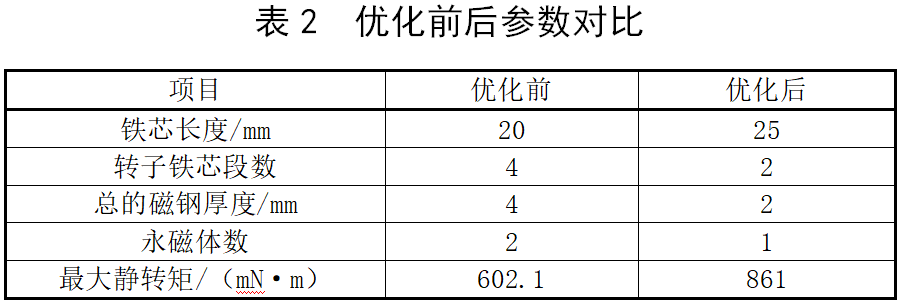
电机优化前后参数对比如表2所示。由前文分析可知,当电机转子铁芯段数由四段变为两段后,电机最大静力矩性能提升为19.1%;当转子永磁体厚度变为2 mm后,电机最大静力矩性能提升约1.4%;当铁芯迭长变为25 mm后,电机最大静力矩性能提升约22.4%。优化后,步进电机的最大静转矩提升明显。
6 结论
本文针对混合式步进电机的仿真及性能优化进行了研究,并从转子结构、磁钢厚度、铁芯迭长三个方面对电机性能进行优化,主要得到如下结论:
(1)进行步进电机设计时,首先应依据指标要求确定合适的铁芯迭长与转子结构,再进行其他参数的设计。电机的铁芯迭长优化,对电机最大静力矩性能提升最为明显;其次为优化电机的转子结构型式;进行优化设计时,也应着重考虑两者对性能的影响。
(2)对于步进电机而言,磁钢的厚度并不是越大越好,它存在着一个最优值,需要依据步进电机磁密分布情况,统筹考虑。当磁路饱和时,继续增加永磁体厚度lm,会导致总的合成力矩变小。因此,在设计过程中,当电机齿部磁密过饱和时,在保证磁钢刚度的前提下,可以适当减小磁钢厚度,优化电机转矩性能。
(3)铁芯长度越大,步进电机的最大静转矩也就越大,但对应的铁芯重量也会相应增加。在太空应用环境中,小体积、轻量化设计是必须优先考虑的,铁芯迭长选取时应考虑电机的性能并兼顾安装尺寸与重量要求。
审核编辑:汤梓红
-
全国卫星天线仰角、方位角、极化角计算软件软件版2009-10-23 0
-
卫星通信天线伺服系统的离散滑模控制算法研究2010-04-22 0
-
卫星天线作用及原理2010-06-04 0
-
海信电视不显示图像的原因(使用卫星天线)2011-02-12 0
-
新卫星天线的最近进展2019-07-16 0
-
怎么判断卫星天线安装的正确位置?2019-08-09 0
-
卫星天线端口静电防浪涌保护设计方案图2020-12-03 0
-
卫星天线简易手动极轴座的制作资料推荐2021-05-11 0
-
船载卫星天线伺服系统仿真设计2010-04-28 640
-
卫星天线焦距的调整2006-04-16 2359
-
卫星天线馈源2009-08-17 6004
-
数字卫星天线跟踪控制器的研制2011-06-26 1300
-
卫星电视中卫星天线及馈源的对焦2011-09-15 3542
-
如何调整卫星天线的方法分享2012-05-07 12624
-
我做的卫星天线32CM,32cm Satellite Antenna2018-09-20 1067
全部0条评论

快来发表一下你的评论吧 !
