

异步电机速度估计学习
电子说
1.4w人已加入
描述
导读:本期文章主要介绍一下用异步电机的运动方程来进行速度估计,低速区域的估计效果还不错。
异步电机矢量控制系统中,转速的闭环控制必不可少,其是保证控制稳定性和控制性能的保证。矢量控制从其获取速度的不同方法来分,可以分为有速度传感器和无速度传感器两大类。一般早期的异步电机矢量控制常采用光电码盘等速度传感器来进行转速的直接检测,并反馈被测电机的转速信号。但额外的速度传感器不仅会增加系统的成本,其次如果传感器安装不当也易影响测速精度,而且传感器的安装还会使电机轴向上体积增大,给电机的日常维护带来一定困难,并且速度传感器还会降低电机的机械鲁棒性,在高温、高湿环境下传感器精度也会受到影响.基于这些不足,为了克服上述问题人们开始研究无速度传感器矢量控制方法。
一、运动方程
 :转子角速度,
:转子角速度, :电磁转矩,
:电磁转矩, :负载转矩,J:机械转动惯量。
:负载转矩,J:机械转动惯量。
由上式异步电机的运动方程可知,转子角速度的估计只需要对电磁转矩和负载转矩的差进行积分,便可得到且容易实现。
二、建模
2.1负载转矩TL
利用信号发生器,给异步电机加上负载转矩。幅值是7.5,频率设为1秒。

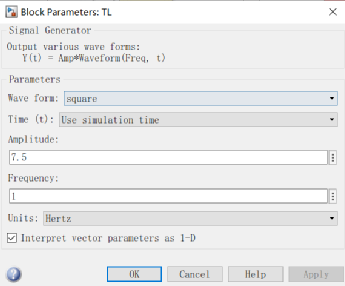
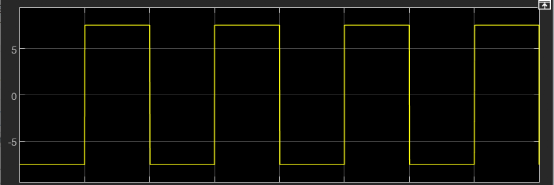
图1 负载转矩变化情况
2.2速度估计
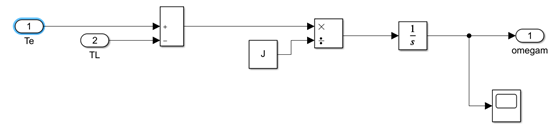
图2 实现过程
实现的过程完全是根据异步电机的运动方程。
三、仿真波形
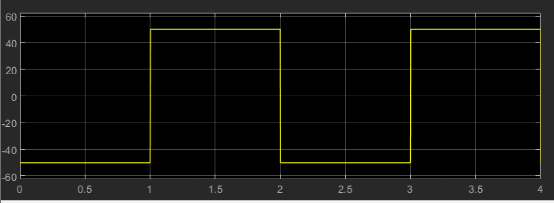
图3 速度给定情况
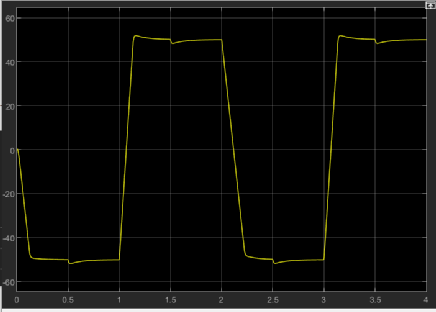
图4 速度估计波形变化情况
从图3给定转速看,图4的速度估计的效果很好。
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
基于高频注入的异步电机无传感器控制2025-07-28 858
-
异步电机与同步电机的区别和应用2023-12-09 5596
-
异步电机速度估计之直接计算法2023-05-30 1710
-
异步电机速度估计-直接计算法2023-05-25 1463
-
异步电机速度估计-混合模型磁链观测器法2023-05-18 2160
-
异步电机速度估计方法之直接计算法2023-05-05 1077
-
异步电机矢量控制之磁通估计器2023-03-29 804
-
力矩电机和异步电机区别2023-03-10 2932
-
什么是异步电机?2021-07-07 1601
-
三相异步电机和单相异步电机之间怎么区别?2021-06-25 10643
-
异步电机与同步电机的区别2019-06-21 110589
-
异步电机的无速度传感矢量控制设计2016-01-21 4899
-
SIMUlink的异步电机的建模与仿真讲解2015-12-28 1933
全部0条评论

快来发表一下你的评论吧 !
