

汽车电子T-Booster与ESC耦合制动系统技术解读
汽车电子
描述
一 、概述
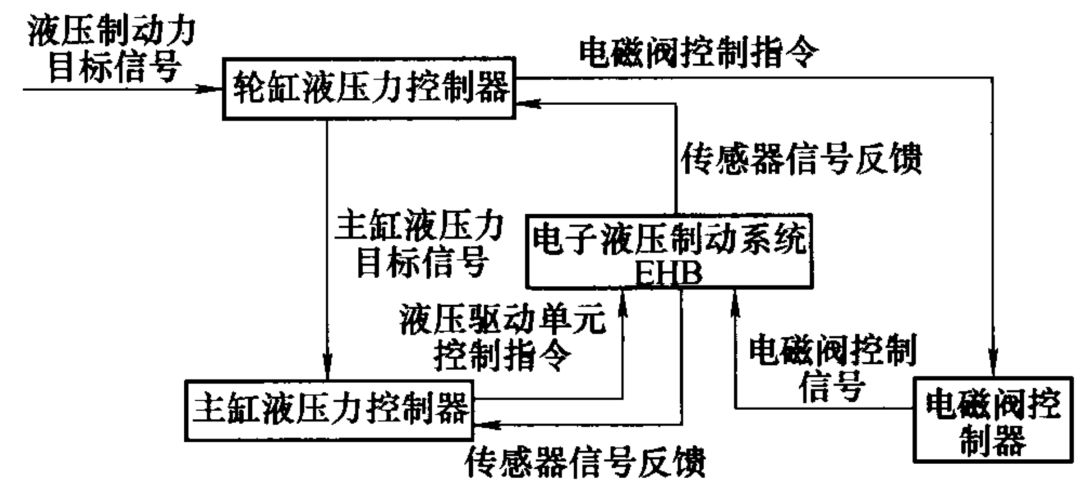
简单介绍一下线控制动是怎么回事,分析线控制动技术类型、结构和优缺点及研究现状,阐述其功能特点和工作原理。在剖析电子液压制动系统组成架构的基础上归纳出电子液压制动系统的液压力控制架构,以控制变量和控制算法为突破口,从主缸液压力控制和轮缸液压力控制这两个层面分别对国内外的研究进展进行综述,对能够应用于电子液压制动系统上的电磁阀特性进行分析,对其控制方式进行研究,提出对于电子液压制动系统液压力控制的发展展望;根据电动智能汽车对制动系统提出的新要求,设计了一款新型混合线控制动系统HBBW。
基于HBBW开发了前后轮制动力精确跟随控制算法,并进行了HiL试验验证。前轮EHB和后轮EMB系统均能达到设计的响应要求,较好跟随目标压力;通过整车制动力分配算法,能实现对前后车轮制动力的精确调节,满足整车制动力分配的需求;对一种线控制动系统踏板感觉模拟器进行计算分析和试验验证,确定了模拟器常闭电磁阀过流孔径是影响踏板行程特性曲线偏离的主要因素. 重新设计了一种液控开闭阀,该阀由原踏板模拟器常闭电磁阀控制,所设计的液控开闭阀可提高踏板模拟器回路的通流能力. 利用 AMEsim 仿真模型完成参数选型并进行了装车试验,仿真及试验结果均表明该方案可获得良好的踏板感曲线精度,同时具备开发方便、降低电磁阀负荷的特点;汽车安全技术的研究与开发是当今世界汽车技术的重要发展方向,汽车制动系统对车辆的安全行驶起着至关重要的作用。采用线控技术构建有关汽车安全性能的电子控制系统,可极大地提高驾驶的安全性、可靠性和稳定性。
线控制动给汽车结构和制动性能带来根本性变革,相对传统制动系统具有无法比拟的优点,其研究与应用对汽车安全性、可操纵性、舒适性以及节能环保都将起到重要的作用。然后简述了在当前新形势下线控制动系统面临的主要需求和未来发展趋势。
二、定义
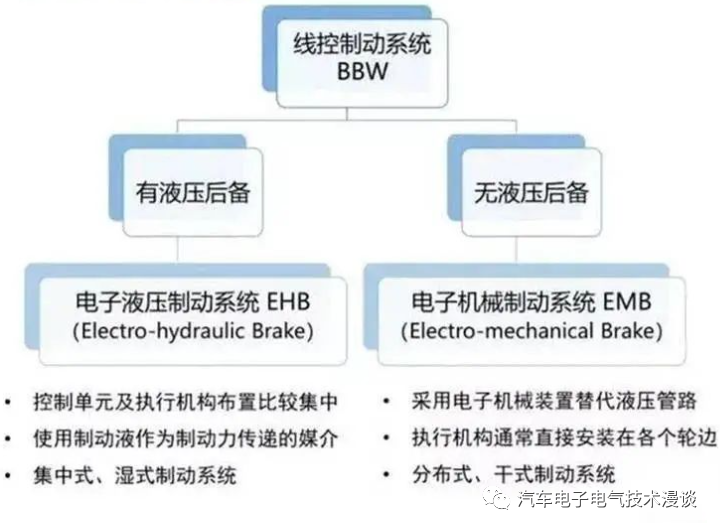
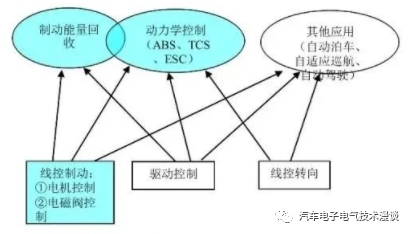
线控技术(X-by-Wire)”就是“电控技术”,从航空技术领域引入,其中,“X” 代表汽车中传统上由机械或者液压控制的各个功能部件,线控制动属于线控,用制动(Brake)代替X就称线控制动(Brake-by-Wire)。机械连接逐渐减少,制动踏板和制动器之间动力传递分离开来,取而代之的是电线连接;将原有的制动踏板用一个模拟发生器替代,通过制动踏板位置传感器监测驾驶员的制动意图产生、传递制动信号,将制动踏板机械信号转变为电控信号,并将信号传递给控制系统和执行机构,以电控模块来实现制动力,并根据一定的算法模拟踩踏感觉反馈给驾驶员;电线传递能量,数据线传递信号,所以这种制动叫做线控制动。 如果制动踏板仅仅只连接一个制动踏板位置传感器,踏板与制动系统之间没有任何刚性连接或液压连接的,都可以视为线控制动系统,如下图。
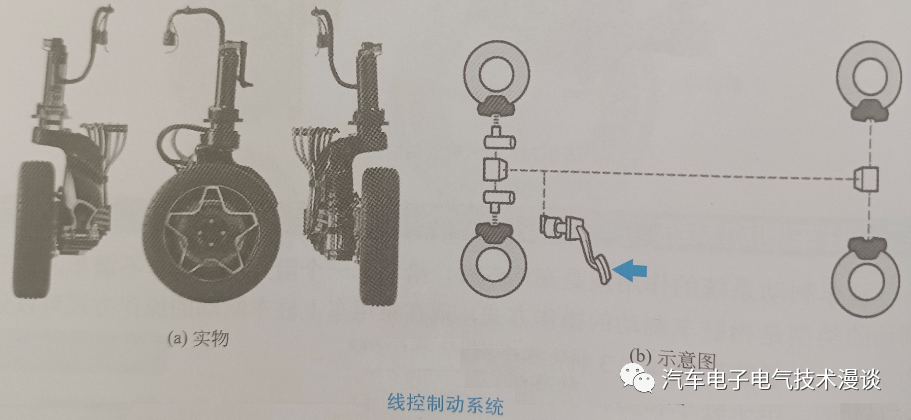
大部分小型车都采用传统的制动系统液压制动,里面通过制动踏板提供能量,而线控制动系统有专门的能量供给方式,一般来说是通过轮边的一些电机直接驱动进行这些工作。里面传统的制动系统液压和气压管路没有了,这是它们最大的区别,比较如下图所示,
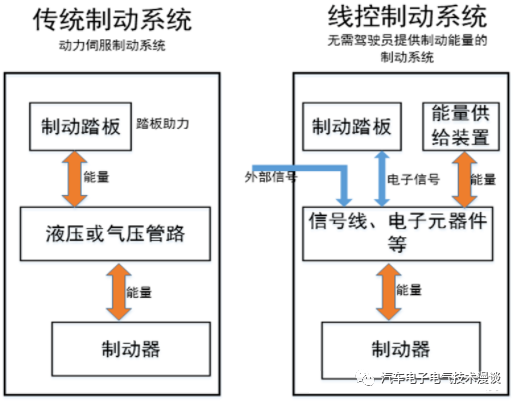
传统制动系统与线控制动系统的区别
线控制动使用一个制动踏板传感器,监测踏板的位置;踏板的移动被传递给ECU,ECU与四个直流电动机相连,每个轮胎上有一个;根据制动踏板的踩踏情况,ECU命令电机进行制动。由于这些电机是相互独立的,它们可以对每个轮胎施加不同的压力,这有助于使用其它技术,如ABS,TCS,ESC等,ECU通过线控液压制动系统,使四个轮缸完成不同的任务,比如增压,减压或者保压,从而完成车辆的制动,或者稳定性控制;ECU还使用来自其他传感器的数据,如轮速传感器和横向加速度传感器,以获得对需要多少制动的完美概念。由于制动是汽车中非常重要的一部分,它的故障是相当具有破坏性的。因此,线控刹车系统也使用了一个备用刹车系统,以确保汽车能够一直刹车。这种冗余系统是L3以上自动驾驶功能必须要具备的。
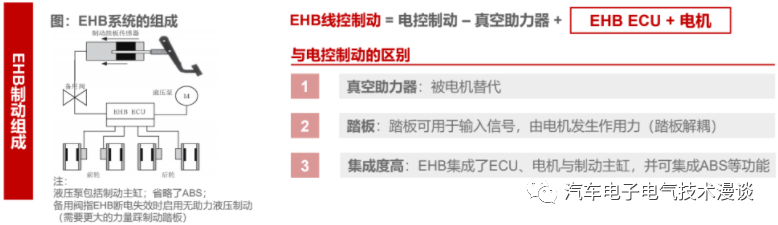
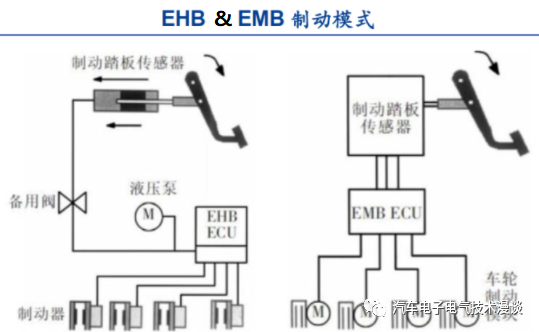
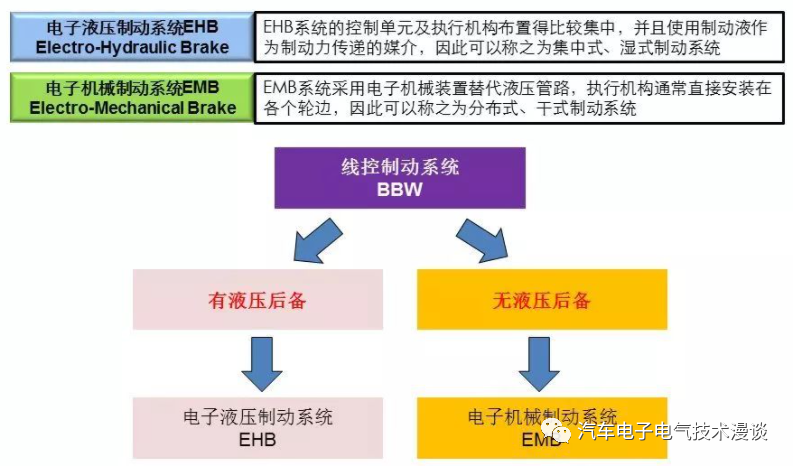
EHB是Electronic Hydraulic Brake的简称,是从传统的液压制动系统发展来的,但与传统制动方式有很大的不同。由于液压管路发展了上百年,现阶段已经是非常成熟可靠的系统,并且也能较好的控制成本,是在它的基础上,用电子器件替代了一部分机械部件的功能,将传统液压制动技术的动力源替换为电子控制系统,只用了一个伺服电机和一套控制器为EHB系统提供动力,取消了传统制动系统中的真空供给部件和真空助力部件。制动踏板不再与制动轮缸有任何机械连接,采用的是电传刹车踏板,即刹车踏板与制动系统并无刚性连接,也无液压连接(如果有也只是作为备用系统),而是仅仅连接着一个制动踏板传感器,用于给电脑(EHB ECU)输入一个踏板位置信号。使用制动液作为动力传递媒介,控制单元与执行机构布置比较集中,并且使用制动液作为制动力传递的媒介,有液压备份系统,那么称之为集中式的湿式的制动系统,也称电子液压制动系统。
与传统制动系统相比,最大的区别在于:首先用电子系统来提供动力源,它以电机为动力源,解决了传统的真空助力器制动系统的真空依赖问题;其次它引入了电控单元和多种传感器,用电子元件替代传统制动系统中的部分机械元件,即用综合制动模块取代传统制动系统中的助力器、压力调节器和ABS模块,使得制动系统实现电控化,可作为智能驾驶的关键执行器。同时保留了成熟的液压部分,可以在电子助力失效时提供备用制动,确保车辆安全。
EHB系统主要功能是提升老旧制动体系的性能,将电子系统和液压系统相结合整合到一起,是一种介于传统的制动系统与电子机械制动系统之间的制动系统, 兼具这两种系统的特点, 系统中既有效把握了传统液压控制系统的结构, 同时又应用了电子控制系统的主要内容。新型的线控电子液压制动系统应运而生,是一个先进的机电液一体电控化系统,其控制单元及执行机构布置集中。传统车用12V电源即可驱动EHB系统,无需设计新的供能系统。
EHB系统虽实现了线控制动功能,但并不完全移除液压系统,备用系统中仍然包含复杂的制动液传输管路,使得EHB并不完全包含线控制动系统产品的优点,EHB系统也因此被视为线控制动控制BBW技术的前期产物。
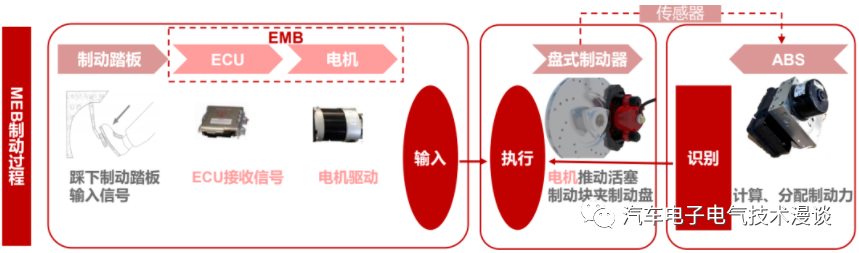
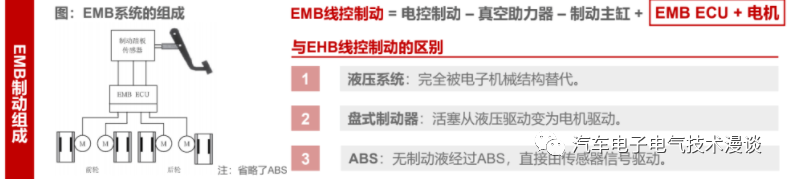
电子机械制动系统EMB是Electronic Mechanical Brake的简称,最早是应用在飞机上的,如美国的F-15战斗机就采用了EMB制动器,后来才慢慢转化运用到汽车上来。EMB与传统的制动系统有着极大的差别,与常规的液压制动系统截然不同,完全不同于传统的真空助力液压制动系统,基于一种全新的设计理念,完全摒弃了传统制动系统的制动液及液压管路等部件,取消了使用一百多年的刹车液压管路,完全抛弃了液压装置,使用电子机械系统替代,其能量源只需要电能,因此执行和控制机构需要完全的重新设计,EMB作为纯机械系统,执行机构通常直接安装在各个轮边,将电机集成在制动钳上,踏板产生制动信号直接输入到制动钳,输入与终端执行之间的部件全部简化。没有制动液也没有液压管路,由电机驱动产生制动力,每个车轮上安装一个可以独立工作的电子机械制动器,如果四个轮胎需要制动的话,就需要四个电机,也称为分布式、干式制动系统。采用电子控制,使用控制模块控制伺服电机进行制动,通过伺服电机直接作用于轮缸,直接给刹车碟施加制动力。这有点像电子手刹,但是与电子手刹最大的不同是它需要能够产生足够大的制动力并且制动线性要高度可调,响应要非常迅速。
汽车的线控制动系统涵盖面广,主要包括了控制装置、传动装置等多项构成,通过全面控制有关的制动系统,并联合先进的制动器,就能够在不同的制动器中,单独进行控制,完成独立操作。而制动踏板和制动器之间没有采用机械进行连接,而是用电线关联,通过电线将两者间的能量、信号等进行传送,不仅提升了传输效率,还能提高汽车的整体性能,有效保障了驾驶过程中的安全。
线控制动系统包含传统制动技术,是基于动力学、运动学、电控等多学科融合技术,技术壁垒较高。掌控着自动驾驶的底盘安全性和稳定控制,只有拥有足够好的制动性能(包括响应速度快、平顺性好等),才能为行驶安全提供良好保障。这一系统结合了汽车电子技术和网络信息技术, 它的应用推动了汽车全自动化水平的提升, 同时在汽车的智能控制方面有重要的作用, 给其创造了良好的条件。
线控制动可以缩短制动距离,软件定义踏板感,满足智能驾驶需求,符合集成化、电子化趋势。即使整车EEA变革,制动单元ECU、芯片对安全稳定性能要求严格,将长期独立存在。
(1)改人力为电信号作为输入起源
在自动驾驶典型的感知-规划-执行设计范式中,线控制动属于执行层部件,为感知层开放了接口。上一代制动系统制动力的输入源必须是驾驶员,而线控制动既可以由刹车踏板控制,也可以脱离人力,由ECU控制主动建压。因此,线控制动作为线控底盘的一部分,是L3+级别自动驾驶的必备条件,部分L2-L2.5级别自动驾驶车型也装配了线控制动。
(2)更快更精的刹车性能,软件定义踏板感
电信号传递快于机械连接,为自动驾驶提供更高级别的安全守护。常规制动系统响应时间为300-500毫秒,布雷博的线控制动系统响应时间只有90毫秒,线控制动距离相应缩短。
三、 组成
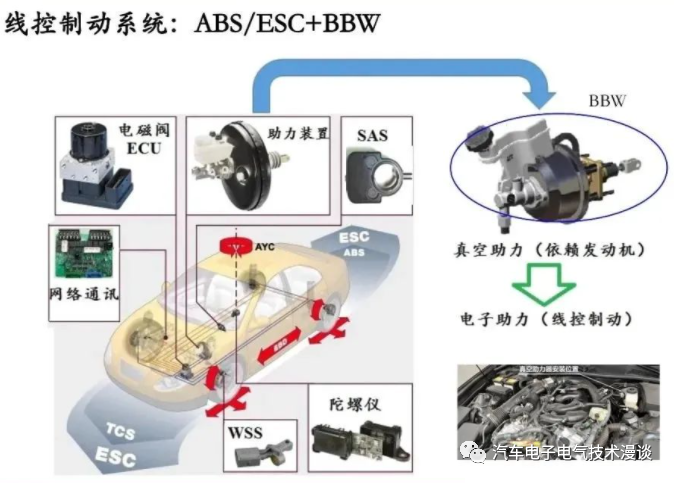
由于防抱死制动系统(ABS)、车身稳定控制系统(ESP)等逐步产生,线控制动系统慢慢在传统的制动系统上发展起来。
L2时代的线控制动可以分为燃油车、混动、纯电三大类,燃油车基本都采用ESP(ESC)做线控制动;混动车基本都采用高压蓄能器为核心的间接型EHB(电液压制动);纯电车基本都采用直接型EHB,以电机直接推动主缸活塞。
L3+级别自动驾驶为线控制动提供明确的市场需求, 线控制动是自动驾驶的标配。线控制动属于执行层部件,既可以由刹车踏板控制,也可以脱离人力,由ECU控制主动建压。功能相似的ESP车身稳定系统只能作为紧急备用方案,要实现L3+级别自动驾驶必须开发一套新的电子助力装置作为常用制动,并配合ESP、EPB、RBU等形式的电子安全冗余。

1.ESP
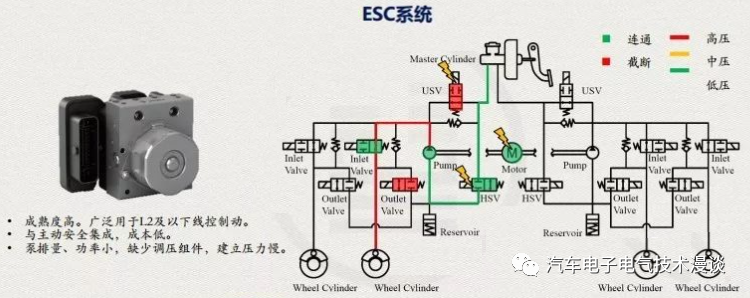
ESP(Electronic Stability Program)车身稳定系统有主动刹车的诉求,因此线控制动系统的结构在ESP中也有所体现。但即便经过了几十年发展,ESP仍不能作为常用刹车方案,只能作为紧急备用方案,无法兼容线控制动功能。博世ESP系统的最大减速度为0.4g,低于常规刹车0.6g-0.8g的要求。并且ESP反应速度较慢,所需刹车时间为ibooster的三倍,每次使用都会导致寿命急剧下滑,频繁使用不超过一个月便会报废,因此有必要重新开发一套电子助力装置。
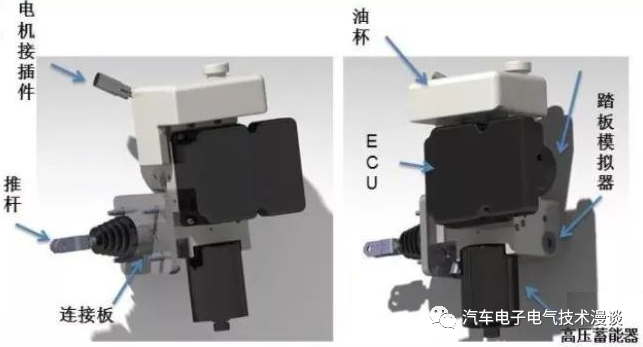
2.电子液压制动系统(EHB) 典型EHB由制动踏板位移传感器(电子踏板)、电子控制单元ECU、液压执行器机构(液压泵、备用阀和制动器)等部分组成。电子踏板是由制动踏板和踏板传感器(踏板位移传感器/角度传感器 )组成。制动踏板位置传感器用于检测踏板行程/踏板转角,然后将位移/转角信号转化成电信号传给ECU,实现踏板行程/转角和制动力按比例进行调控。如下图所示。
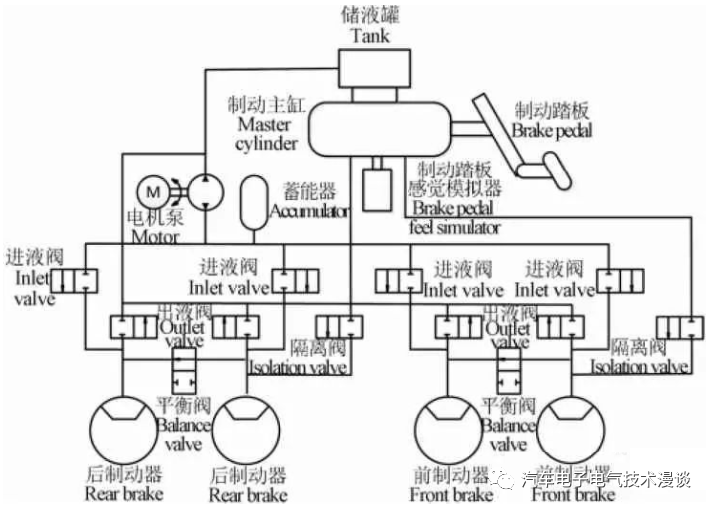
电子液压制动系统结构示意图
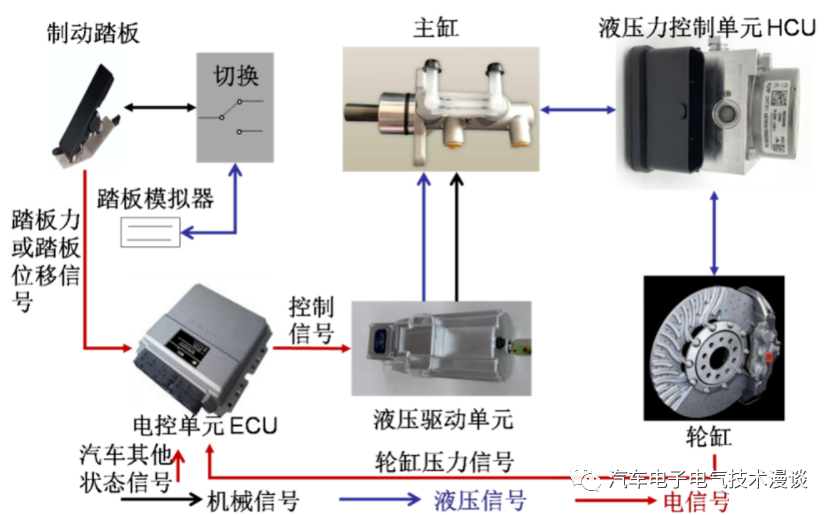
电子液压制动系统(EHB)结构图
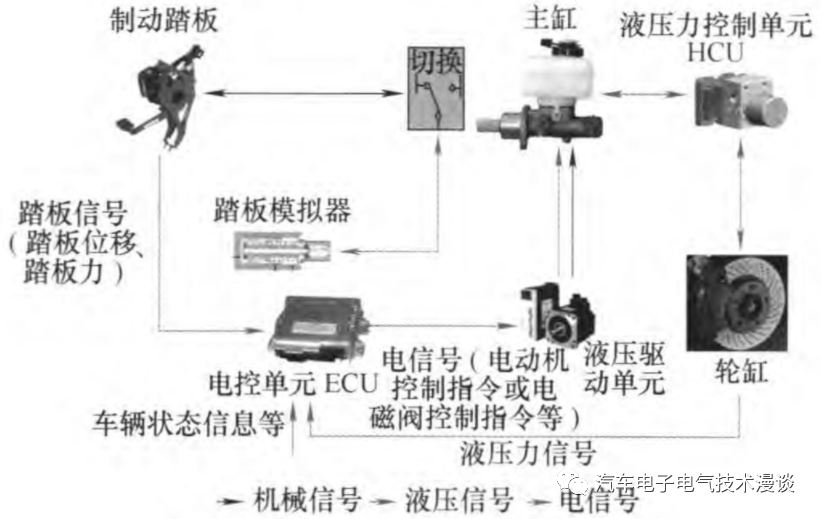
电子液压制动系统的组成
如上图所示,电子液压制动系统共分成四大部分:制动踏板单元、液压调节(驱动)单元、制动执行单元、电子控制单元(控制系统)。
(1)制动踏板单元包括制动踏板、制动液罐、制动主缸、踏板行程传感器、制动踏板模拟器等,负责为驾驶员提供合适的制动踏板感觉,同时获取驾驶员意图 。在普通制动情况下,制动踏板单元不再向车轮制动器提供制动能量,其主要用来利用踏板行程传感器采集驾驶员制动意图以及利用制动踏板感觉模拟器模拟驾驶员的制动感觉。
(2)液压驱动单元包括「电动机 + 减速机构」、「液压泵 + 高压蓄能器」等形式。液压调节单元包括布置在发动机舱内的液压调节器、制动管路、车轮制动器以及安装在蓄能器和每个车轮制动器处的压力传感器。液压调节单元主要包括进液阀、出液阀、平衡阀、隔离阀、气囊式蓄能器以及电机泵等。相比于电子稳定性系统ESP的液压调节单元,EHB在制动主缸与液压调节器连接处增加有隔离阀,用于隔断制动踏板单元与液压调节单元之间的物理连接;同时使用高压蓄能器储存来自电机泵的高压制动液并向车轮制动器提供制动能量,以实现在普通制动下的主动制动功能。电机泵只在蓄能器压力降低到规定极限时,才驱动电动机使液压泵工作。
由于电动汽车制动主缸最高建压需求往往超过15MPa,因此在采用电动机作为液压压力动力源的电子液压制动系统中,均需要加装减速增扭机构,以增大电动机的最大输出转矩,减小电动机体积,节约成本。
1)「电动机 + 减速机构」负责将电动机的力矩转化成直线运动机构上的推力从而推动主缸产生相应的液压力;
2)「液压泵 + 高压蓄能器」通过高压蓄能器的高压能量来提供主缸液压力或轮缸制动力以实现主动调节。
该系统通过制动踏板单元获取制动驾驶意图从而向整车控制器发送指令,以控制高压蓄能器、电磁阀和泵产生相应的液压力;
当高压蓄能器内压力不足时,液压泵将对高压蓄能器增压。
(3)制动执行单元包括主缸,液压管路,轮缸等。这些机构跟传统制动系统的结构保持一致,将推动主缸的推力转化成制动器的液压力,最后通过摩擦力作用在制动盘上产生相应的制动力矩。
(4)控制系统包括电控单元(Electric Control Unit,ECU)、液压力控制单元(Hydraulic Control Unit,HCU)、液压力传感器、踏板力传感器以及踏板位移传感器等;液压力控制单元(HCU)是液压力控制的核心单元。电子控制单元与液压调节器集成在一起,主要通过CAN总线接收来自传感器信号并向液压调节器发出控制指令。
1)HCU 用以精确调节轮缸液压力;HCU 的主要元件是电磁阀,轮缸液压力控制的底层控制就是电磁阀控制。目前用于 HCU 的电磁阀主要有三类:开关阀、高速开关阀和线性阀。
①开关阀是 HCU 的核心执行部件之一,利用快速的开启和关闭动作来改变液体的流向和平均流量。开关阀的开关机理是通过阀口两端压力差产生的液压力和液动力、被压缩弹簧的回位力、电磁线圈产生的电磁力以及阀芯运动过程中所受的制动液粘性阻力、机械摩擦阻力的合力来驱动阀芯移动从而进行阀口的开关动作。
②高速开关阀与传统开关阀的工作原理相同,都是在开、关两种状态之间切换来实现液流的通断。不同之处在于高速开关阀响应速度较快。
③线性阀是解决高速开关阀低频控制下存在缺点的一个有效途径。线性阀的主要特征是节流面积可调,需调控电磁力。其设计思路是控制阀口开度,压力增益可控可调。同一种孔径的产品覆盖面更广,通用性更强,制造成本更低;而且还能抑制噪声,提高制动的舒适性 。电磁阀控制本质上是流量控制。
2)液压力传感器作为反馈单元将液压力实时反馈到整车控制器里,用作控制算法的输入量;
3)踏板力传感器和踏板位移传感器用来检测驾驶员的踏板信号,从而获得驾驶员意图。
特种车用线控制动系统
是一种基于液压传递的全解耦线控制动系统。主要由电机、减速増扭机构(齿轮、丝杆、螺母)、制动主缸、前后壳体、踏板推杆、行程传感器、液压力传感器、电机控制器等组成。项目成果所涉及到的新型踏板行程传感器将踏板推杆的平动转化为传感器内部器件的转动,基于此,可以通过在推杆上设计不同曲率的沟槽,将传感器设计为非线性、线性以及不同的物理精度。所涉及的全解耦电子助力器,制动踏板推杆和制动主缸活塞之间无机械链接,属于智能制动执行器,满足特种自动驾驶车辆对制动系统主动制动的功能要求、取消了传统制动系统对发动机真空度的依赖、具备配合电动车实现制动能量回收的功能。
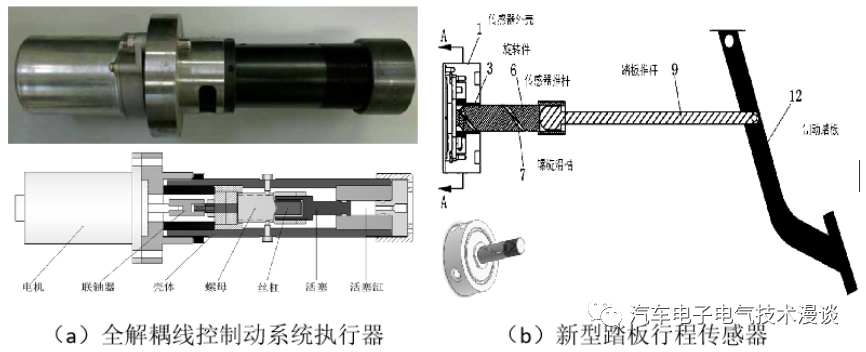
全解耦线控制动系统执行器与行程传感器
解耦原理:踏板推杆与制动总泵推杆之间无连接,制动系统的动作依靠电信号或者行程传感器信号进行控制实现。
工作原理:当驾驶员踩下制动踏板时,踏板推杆向前移动,推动行程传感器内部旋转件转动,传感器记录旋转部件的转角,根据推杆滑槽曲率计算出踏板推杆实际行程,识别驾驶员制动意图。通过电信号传递给系统控制器,控制器控制执行器电机动作,电机驱动丝杆和螺母,讲转动转化为平动,推动制动缸活塞建立液压制动力,作用在轮边制动盘上,产生制动力。
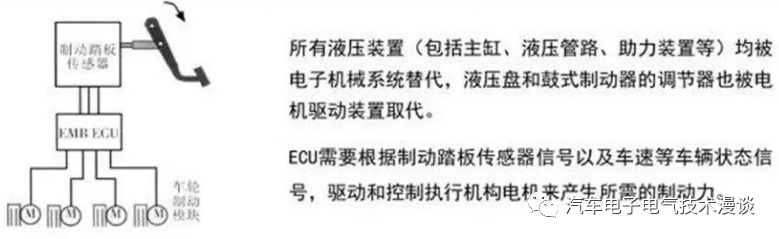
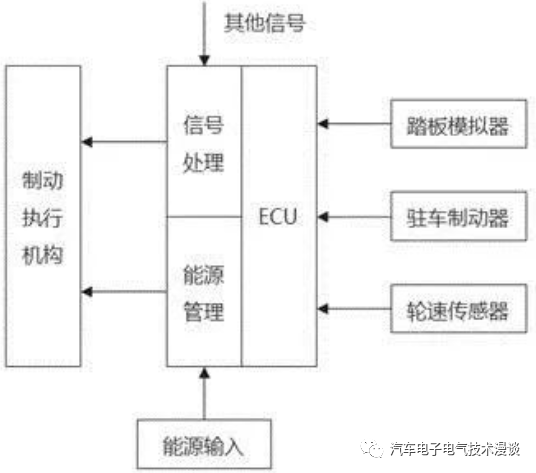
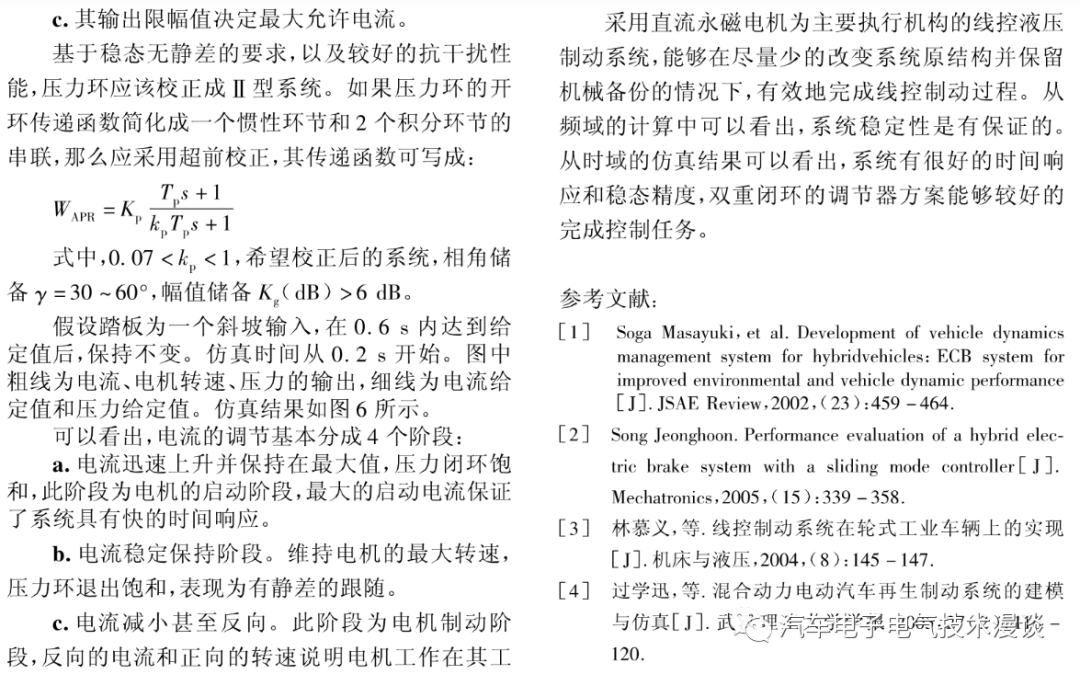
3.电子机械制动系统(EMB) EMB系统主要由踏板模块(传感器)、控制模块(ECU)、驱动执行模块(电子机械制动器)等组成,系统有4套独立的制动系统,分别位于四个轮毂的轮缸处,并且配有独立的控制器,以便实现四轮制动力的独立调节。EMB系统中,所有液压装置(包括主缸、液压管路、助理装置等)均被电子机械系统替代,液压盘和鼓式制动器的调节器也被电机驱动装置取代。其典型EMB系统如下图示。
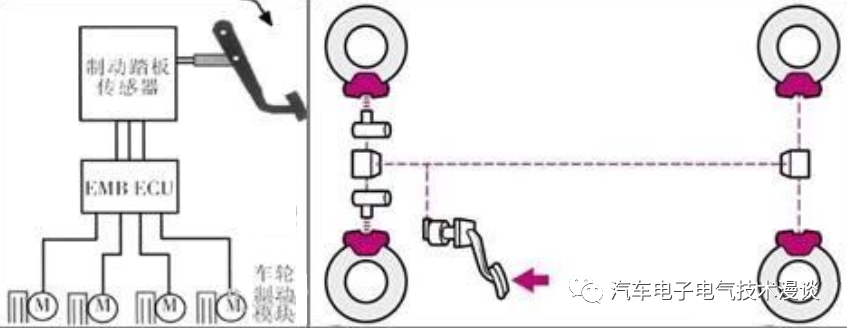
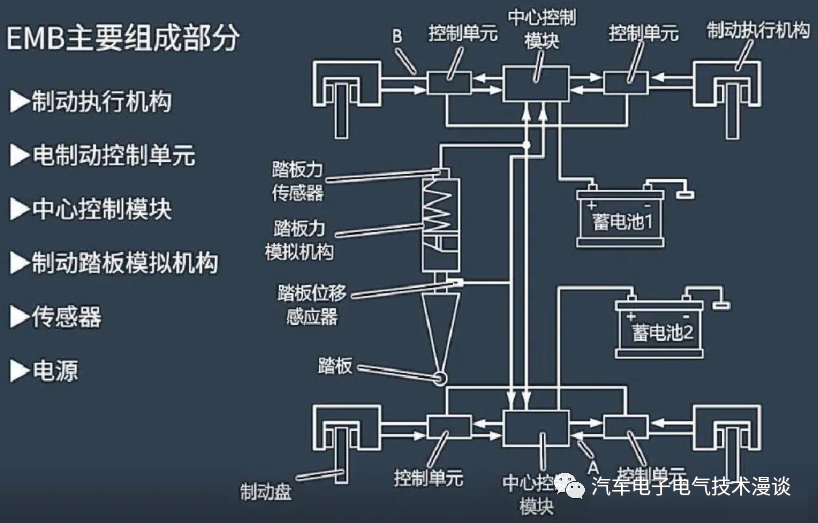
EMB的结构图
(1)电制动器:由电机驱动产生制动力
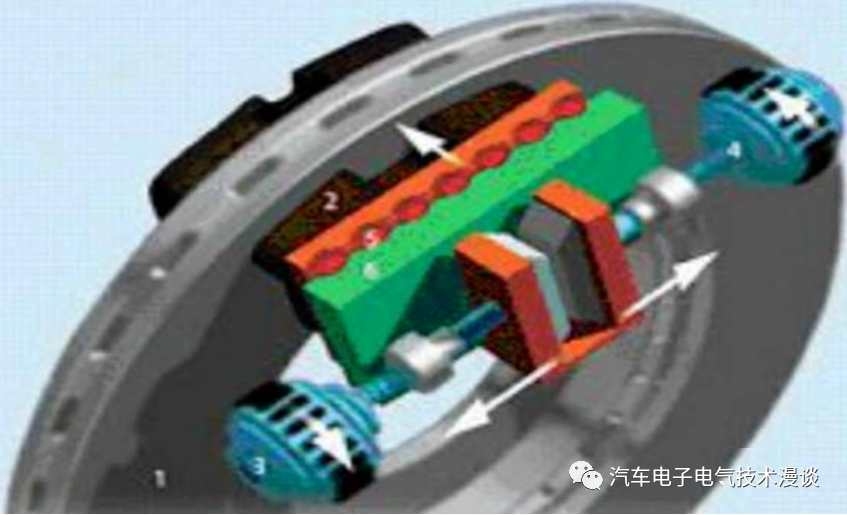
EMB系统的关键部件之一是轮边执行机构系统(电子机械制动器),集成了转角传感器、 扭矩传感器, 结构上又有将电机转动转化为直线运动的机械机构,它通过ECU改变输出电流的大小和方向实现执行电机的力矩和运动方向的改变,通过减速增矩,将电机轴的旋转变换为制动钳块的开合;通过相应的机构或控制算法补偿由于摩擦片的磨损造成的制动间隙变化,同时,电机和驱动机构等都装在制动器上,其结构设计必须十分紧凑,以满足空间要求。轮边工作环境恶劣,是EMB开发难度所在。 当前的EMB实现并没有标准形式。

(2)ECU
1)通过制动器踏板传感器信号以及车速等车辆状态信号,驱动和控制执行机构的电机来产生所需的制动力,控制制动器制动。
2)接收驻车制动信号,控制驻车制动;
3)接收车轮传感器信号,识别车轮是否抱死、打滑等,控制车轮制动力,实现防抱死和驱动防滑功能;
(3)轮速传感器:准确、可靠、及时的获取车轮速度。
(4)电源:为整个制动系统提供能源,可与其它系统共有。
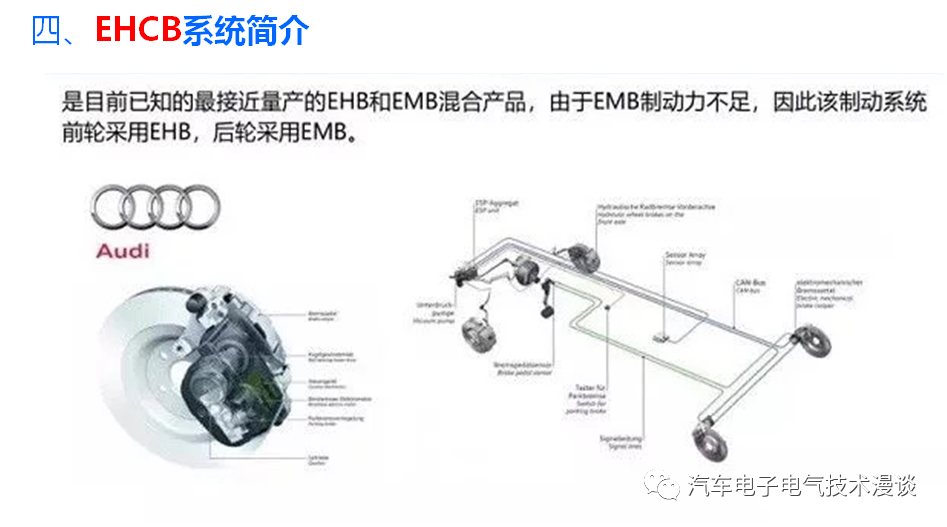
4.EHCB系统
是目前已知的最接近量产的EHB和EMB混合产品,由于EMB制动力不足,因此该制动系统前轮采用EHB,后轮采用EMB,将两种制动系统结合应用可有效发挥两种制动系统的优势。前轮采用EHB系统可实现前轮单轮制动力调节,同时靠装于前轴的EHB实现制动失效备份以满足现行法规要求;后轮采用EMB可缩减制动管路的长度,消除压力控制过程中由于管路过长带来的不确定性,同时能够方便地实现电子驻车制动(electrical park brake,EPB)。
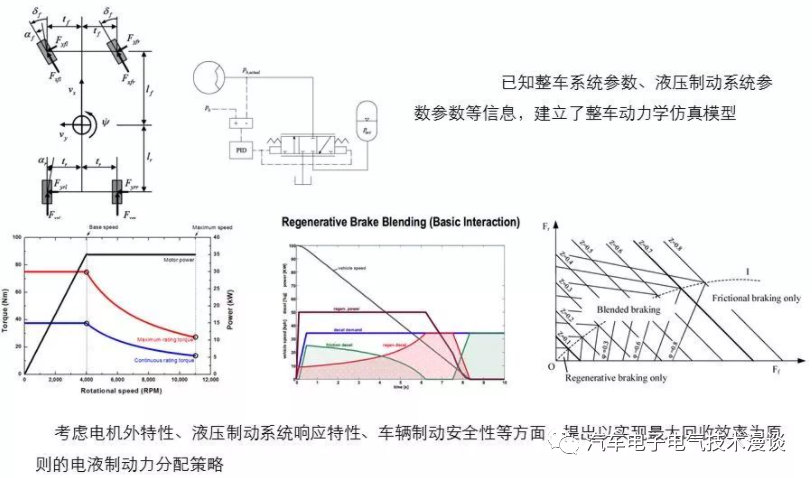
混合线控制动系统制动力精确调节控制策略
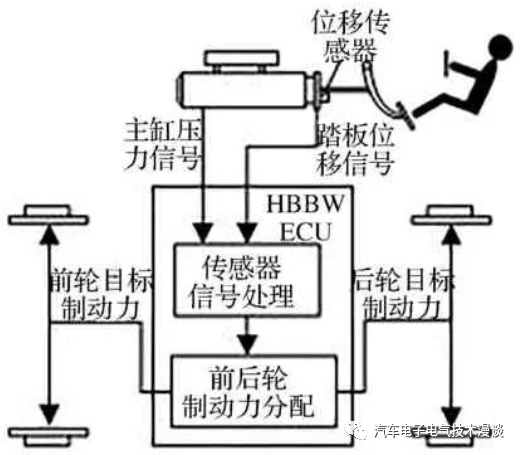
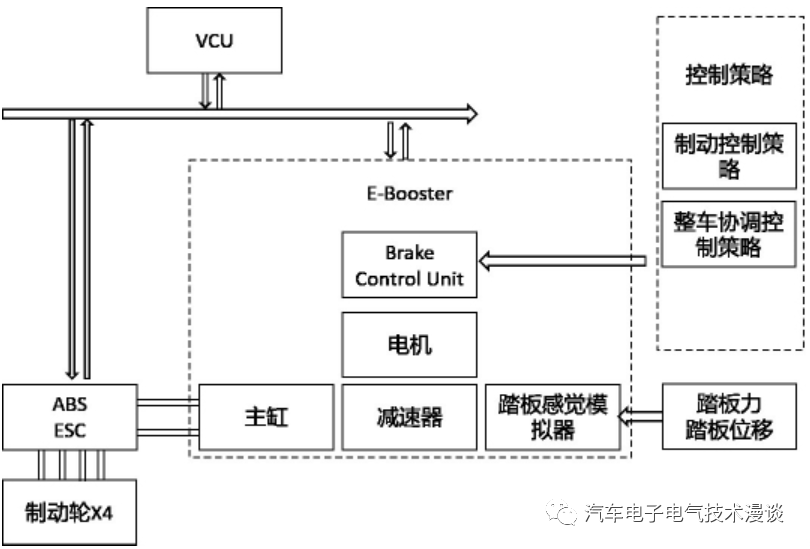
鉴于电子液压制动(electronic hydraulic brake,EHB)系统液压管路复杂且难以集成驻车制动,而电子机械制动(electronic mechanical brake,EMB)很难满足失效备份的需求,提出了一种前轴采用EHB,后轴采用EMB的混合线控制动系统(hybrid brake by wire system,HBBW),研究了EHB的双闭环压力跟随PI控制算法和EMB的三闭环制动力跟随PI控制算法,使其制动力能快速准确地跟随目标值。在此基础上,提出了混合制动系统的制动力精确调节PI控制策略和控制算法,提出将EHB和EMB的制动系统组合形成一种比较理想的混合线控制动系统(hybrid brake by wire system,HBBW),最后基于dSPACE Autobox和CarSim搭建了HBBW系统的硬件在环(hardware-in-the-loop,HiL)试验平台,研究了EHB和EMB的压力跟随PI控制算法,使其制动力能快速准确地跟随目标制动力,进行了HiL测试与算法验证。结果表明,混合线控制动系统可有效地协调工作,实现四轮制动力快速、精确调节,从而提高车辆制动性能。 提出的HBBW系统总体布置方案如下图所示,系统采用前轮EHB,后轮EMB的结构布置。前轮EHB模块由EHB控制器、车轮制动器、液压控制单元(hydraulic control unit,HCU)、制动主缸、踏板感觉模拟器和储液罐组成;后轮EMB模块每个车轮上有一个,由单独的EMB控制器EMB ECU和一个EMB执行器组成。系统装备有一个中央控制器HBBW ECU实现压力控制。
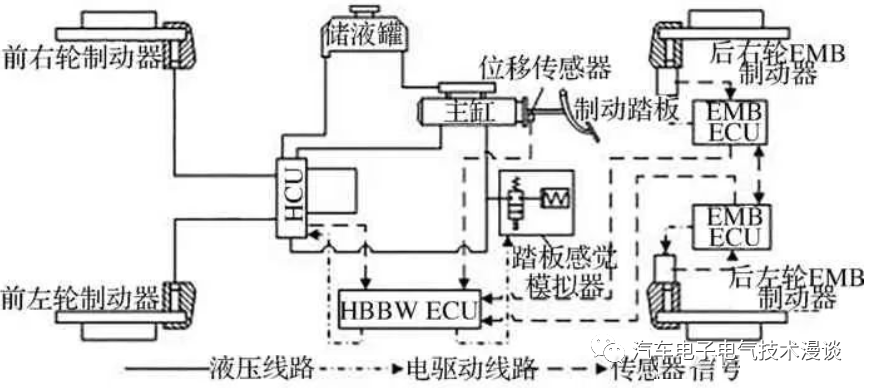
混合线控制动系统总体布置方案 系统工作流程如下:(1)驾驶员踩下制动踏板,主缸中的制动液进入踏板感觉模拟器形成与传统制动系统相同的踏板感觉;(2)HBBW ECU采集制动踏板位移传感器和主缸压力等信息识别驾驶员的制动意图,根据前后轮理想制动力分配曲线给出前后轮制动力;(3)前轮制动由EHB实现,EHB控制器集成于HBBW ECU中,它控制电动泵抽取储液罐中的制动液,向高压蓄能器注入制动液作为高压压力源,通过电磁阀控制制动液流入流出制动器实现压力跟随;(4)后轮制动由EMB实现,HBBW ECU通过CAN向EMB ECU发出制动力控制指令,EMB ECU作为底层控制器驱动EMB执行器实现后轮制动力控制;(5)在HBBW ECU中,还可集成 EBD/ABS/ESP等控制算法。 当系统失效时,启动制动失效备份,如下图所示。后轮EMB不再工作,前轮EHB恢复电磁阀初始状态,踏板感觉模拟器前端电磁阀和增减压电磁阀关闭,两隔离阀打开,电机不再工作。驾驶员通过制动踏板经主缸直接作用于前轮轮缸形成制动力,实现制动。
EHB制动失效备份原理图 该系统既能充分发挥两种制动系统的优势,又能弥补各自的不足。为提高控制响应速度与精度时,在前轴装EHB,实现制动失效备份以满足现行法规要求;另外,由于后轴EMB所需的制动力矩相对较小,现有的12V车载电源系统满足其功率需求。
-2 HBBW制动力调节控制算法
-2.1 HBBW前后轮制动力分配
HBBW在对前后轮进行制动力精确调节之前,需要识别驾驶员的制动行为,下图为HBBW前后轮制动力分配框图。驾驶员踩下制动踏板,位移传感器和主缸压力信号分别采集信号输送给HBBW ECU,HBBW ECU通过对传感器的信号采集分析识别出驾驶员的制动意图,经整车控制算法,根据汽车制动过程中的不同需求,如ABS,ESP和EBD等算法开启和关闭给出前后轮的目标制动压力。
HBBW前后轮制动力分配框图 为能精确而快速地调节前后轮制动压力,EHB和EMB应满足: (1)EHB系统达到14MPa的轮缸压力的增压时间小于200ms,超调量小于1%,能较好地跟随正弦调制压力跟随曲线,适应制动系统调压功能; (2)EMB系统达到12kN的制动器制动力的增力时间小于500ms,超调量小于5%,能较好地跟随正弦调制夹紧力跟随曲线,适应制动系统调节夹紧力功能。 以整车EBD控制算法对HBBW制动力调节控制算法进行验证,如下图所示。首先根据制动踏板位移和主缸压力等信息识别驾驶员的制动意图,通过提前设定的主缸压力与前轮轮缸压力之间的关系曲线,给出前轮轮缸的目标压力值p∗(驾驶员目标压力),通过EHB执行器来调节前轮的制动压力。而对于后轮的制动压力则通过后轮的滑移率控制器来调节后轮与前轮之间的相对滑移率。后轮滑移率控制器根据前轮轮速和后轮轮速的差值,输出目标制动器制动力给EMB控制系统,调节后轮的制动力的大小,保证前后轮的角速度一致,达到车轮抱死时前后车轮同时抱死的目的,可表示为

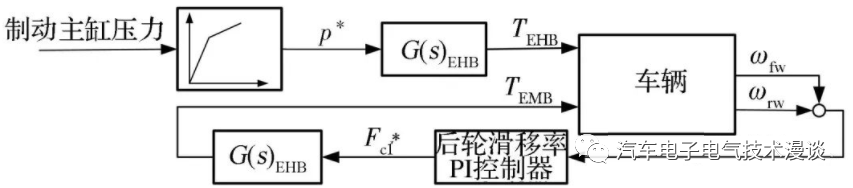
混合线控制动系统EBD控制框图 式中: 为EMB目标制动力;
为EMB目标制动力; 为前轮角速度;ωrw为后轮角速度;Kw-p和Kw-i为后轮滑移率PI控制器的参数。
为前轮角速度;ωrw为后轮角速度;Kw-p和Kw-i为后轮滑移率PI控制器的参数。
-2.2 前轮EHB压力调节控制算法
对于EHB系统轮缸压力的控制,关键在于对线性增减压阀的控制。所选的EHB系统前轮的增减压阀均为常闭阀,下图为EHB轮缸压力跟随控制算法框图。为防止电磁阀过于频繁动作,设定一个保压压力门限值ε(ε>0),控制过程如下:设p∗为目标轮缸压力,p为实际轮缸压力,则当p-p∗<-ε时,减压阀关闭,控制增压阀提升轮缸压力;当-ε≤p-p∗≤ε时,增减压电磁阀均处于关闭状态;当p-p∗≥ε时,增压阀关闭,控制减压电磁阀,降低轮缸压力。在保证轮缸压力跟随中压力误差较小和减少电磁阀开关频繁的前提下,通过试验标定选取ε为0.05MPa。
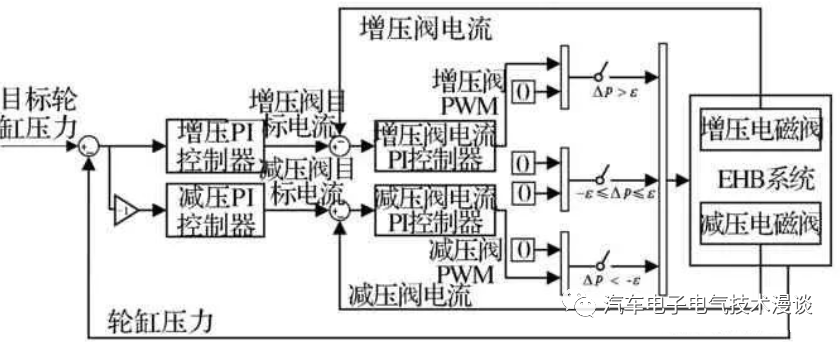
EHB轮缸压力跟随控制框图 对线性电磁阀的控制由电磁阀电流环PI控制器和轮缸压力环PI控制器组成,其中轮缸压力环PI控制器根据目标轮缸压力和实际轮缸压力的差值算得增减压电磁阀的目标电流:
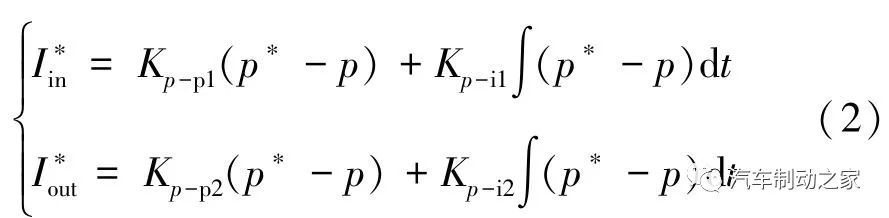
式中:  为增压阀目标电流;
为增压阀目标电流; 为减压阀目标电流;Kp-p1,Kp-p2,Kp-i1和 Kp-i2为压力环PI控制器的参数。 电流PI控制器根据线性电磁阀的目标电流与实际线性电磁阀的电流差值算得调节电磁阀的线圈电压,再换算成PWM控制线性电磁阀开度:
为减压阀目标电流;Kp-p1,Kp-p2,Kp-i1和 Kp-i2为压力环PI控制器的参数。 电流PI控制器根据线性电磁阀的目标电流与实际线性电磁阀的电流差值算得调节电磁阀的线圈电压,再换算成PWM控制线性电磁阀开度:
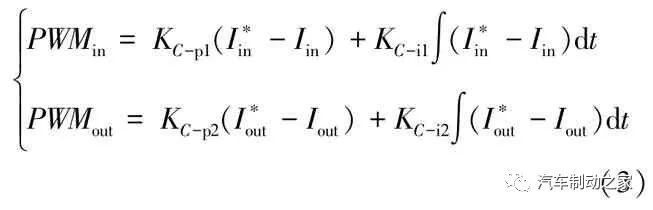
式中:PWM in为增压阀控制信号;PWMout为减压阀控制信号;Iin为实际增压阀电流;Iout为实际减压阀电流;KC-p1,KC-p2,KC-i1和 KC-i2为电流环PI控制器的参数。
-2.3 后轮EMB制动力调节控制算法
对于EMB系统的轮缸压力控制,关键在于对EMB执行器电机的控制。本文中所选取的EMB执行器电机为无刷直流电机(brushless direct current motor,BLDC)。 对BLDC的控制由电机的电流环PI控制器、转速环PI控制器和夹紧力环PI控制器组成,如下图所示。其中夹紧力环PI控制器根据目标制动力和实际制动力的差值算得电机的目标转速,可表示为
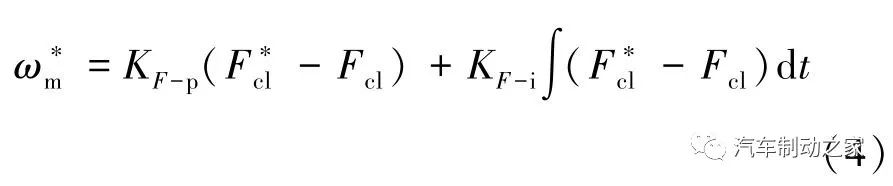
式中: 为电机目标角速度;Fcl为实际制动力;KF-p和KF-i为夹紧力环PI控制器的参数。
为电机目标角速度;Fcl为实际制动力;KF-p和KF-i为夹紧力环PI控制器的参数。

EMB制动力跟随串联三闭环控制框图 电机转速PI控制器根据电机的目标转速与实际电机的转速偏差计算得到电机的目标控制电流,可表示为

式中:i∗为电机的目标控制电流;ωm为电机的实际角速度;KN-p和KN-i为转速环PI控制器的参数。 电机电流PI控制器根据电机的控制电流与实际电机的电流差值算得电机的控制PWM信号:

式中:PWMm为电机的控制PWM信号;i为电机的实际电流;KC-p和KC-i表示电流环PI控制器的参数。PWMm控制BLDC在制动器上形成的制动力。
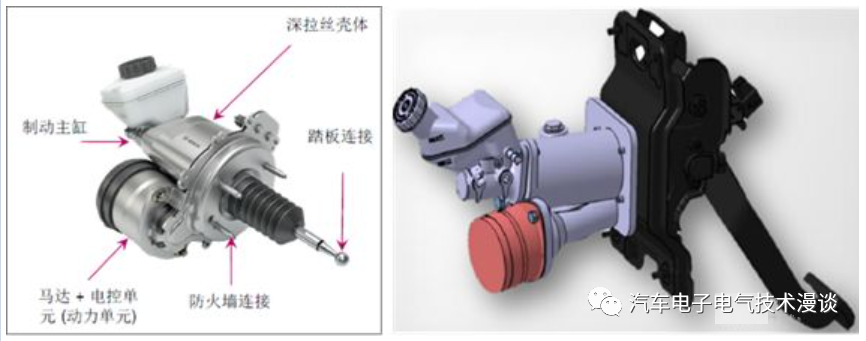
5 I-EHB集成式电子液压制动系统
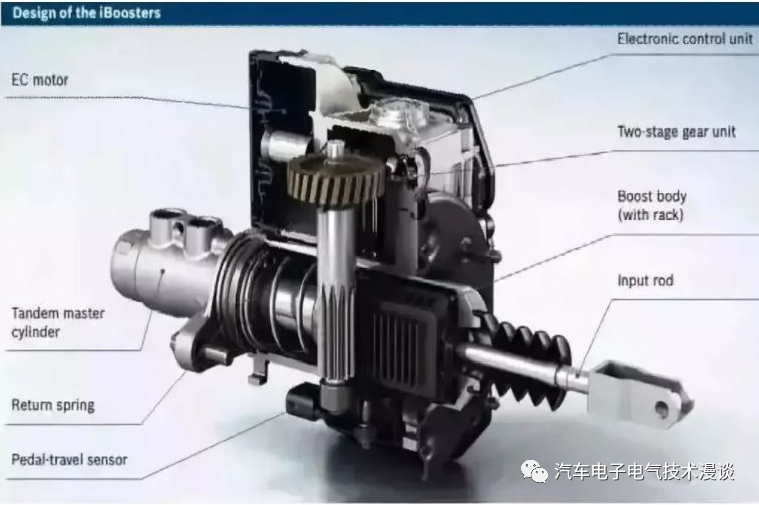
I-EHB系统是一种集成式电子液压制动系统,是以电机+减速机构来代替,内部集成电控模块,整个系统结构更加紧凑。下图为Bosch 公司的iBooster系统。ibooster的响应时间为120-150毫秒,ibooster可配置同一平台的不同车型,通过设定制动性能曲线,软件定义“舒适型”、“运动型”多种踏板感,满足智能驾驶的需求。


Bosch公司iBooster系统

典型带有E-Booster的EHB系统如下图所示。踏板位移和踏板力经电子传感器传导给电子ECU,然后经过不同的助力形式,如电动液压泵高压蓄能器或者直流电机等推动建立起液压,液压再分配给四个制动轮缸。
EHB 系统
(1)I-EHB系统主要组成结构
1)意图获取模块
意图获取模块主要有制动踏板、踏板位移传感器、踏板感觉模拟器等,制动踏板经过踏板位移传感器将驾驶员所踩的制动踏板位移信号发送给I-EHB的ECU。踏板感觉模拟器用来模拟真实状态的脚感与路感。踏板和主缸之间完全解耦,脚感较轻,更便于能量回收。
2)分析控制模块
分析控制模块是整个线控制动的核心,主要为I-EHB的ECU。ECU 通过踏板获取驾驶员的制动意图后,根据相应的算法计算出最佳制动力,控制制动系统的执行。ECU 由嵌入式芯片、信号采集及处理电路、通讯电路、电机驱动电路、冗余电路及I/O 口等组成。
3)液压执行模块
分析控制模块为线控制动的执行部分,包括伺服电机、减速机构、制动主缸等。伺服电机作为驱动电机,与减速机构连接,可直接使用传统车载12V电源,减速机构可增强整个系统的扭矩,获得更大制动力。伺服电机接收来自ECU的制动信号,通过减速机构推动制动主缸建压。
(2)I-EHB系统工作过程
I-EHB系统通过意图获取模块、分析控制模块、液压执行模块等几个模块协调完成整个制动过程,I-EHB系统协调控制示意图如下图所示。
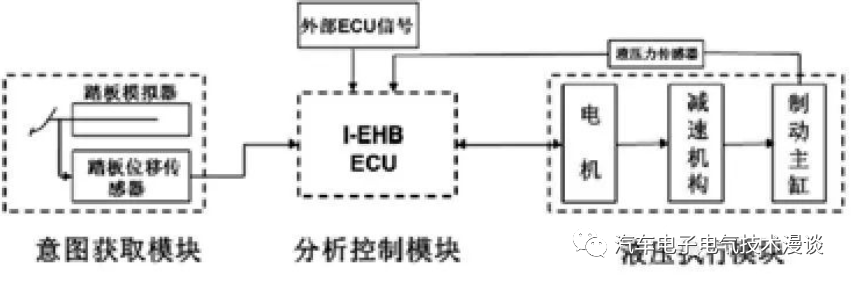
I-EHB 系统协调控制示意图
在车辆正常工况下,I-EHB的ECU接收踏板位移传感器从踏板采集的制动力位移信号,以及其他外部ECU发出的方向盘转角、轮速、横摆角速度等信号,来获取驾驶员的驾驶意图,利用算法计算得出车轮所需的最佳制动力。在制动踏板与主缸完全解耦条件下,踏板感觉模拟器可以根据驾驶员的制动动作输出线性的脚感同时反馈车辆制动状态。制动力转化为电信号输出给伺服电机,电机和减速机构连接,通过减速机构将电信号大小转变为齿条行程大小,推动制动主缸活塞,最终完成建压。制动主缸液压力信号将实时反馈给I-EHB的ECU,用于精确控制主缸压力以及对制动主缸保压。
当车辆处于紧急状态下需要急停或者制动系统电子助力失效时,如下图所示,I-EHB 提供备用机械制动系统。驾驶员快速紧急制动,迅速克服系统内部的解耦腔,此时制动踏板推杆将直接作用于制动主缸,主缸液压力大小直接由制动踏板提供,一定程度上保证紧急情况下的制动安全。

I-EHB 系统助力失效制动示意图
(3)I-EHB系统控制方法
在传统制动系统中,主缸液压力完全来自制动踏板推进的深度,因此,制动时无法精确控制主缸液压力。对于驾驶新手来说,驾驶经验不足不仅影响车辆制动感觉,更影响车辆在紧急状况下整车制动的安全性。I-EHB系统由于采用了电控单元,同时制动踏板与主缸活塞之间完全解耦,使得主缸液压力控制更加迅速与精确。对于I-EHB系统主缸液压力的控制,实际上就是对伺服电机的控制,利用ECU根据相应的控制算法计算驾驶员需要的最佳制动力,将最佳制动力转化为电机的电流信号或者命令力矩,从而完成主缸的建压。

PID 控制策略图
如上图所示,对以电动机+减速机构为动力源的I-EHB系统的控制算法,大多以闭环反馈控制为主。在闭环控制中,比例积分微分控制(PID 控制)是一种最常用的控制方法,同时可通过参数整定变化多种控制结构,获得不同的控制效果。运用在I-EHB系统中的主要控制思路是通过液压力传感器将主缸液压力实时反馈给ECU,将ECU计算出的期望主缸液压力和输出的实际主缸液压力进行对比,然后将二者之间的偏差值利用ECU中设好的PID算法对其整定,输出一个最合适的量给电机,对主缸液压力进行补偿。线控液压制动10MPa主动建压时间≤170ms,液压控制精度≤0.1MPa。
功能安全满足ISO 26262标准要求
(4)IEHB设计原理及设计计算(基本构型)
(5)踏板模拟器设计
(6)IEHB样件制作及硬件接口
(7)制动能量回收软件策略设计和仿真
能量回收效率满足:ECE 15城市工况下制动能量回收降低整车电耗23%。
(8)IEHB仿真和检测设备

(9)整车集成与初步实车匹配

(10)IEHB 二代
集成了ABS、ESC等先进电子制动各项功能,同时可以摈弃真空助力器将制动主缸集成一体。采用液电一体化控制实现对各轮缸的制动力独立且线性性控制。分布式驱动式制动系统方向为实现高集成度,采用集成制动主缸和踏板模拟器实现全解耦的方式。采用电机泵预增压,高压蓄能器供液的形式为制动系统提供制动液压力,保证制动过程快速响应的目的。
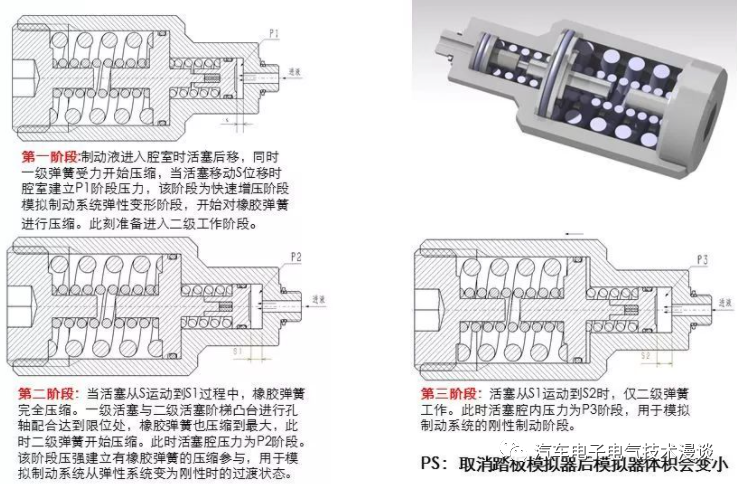
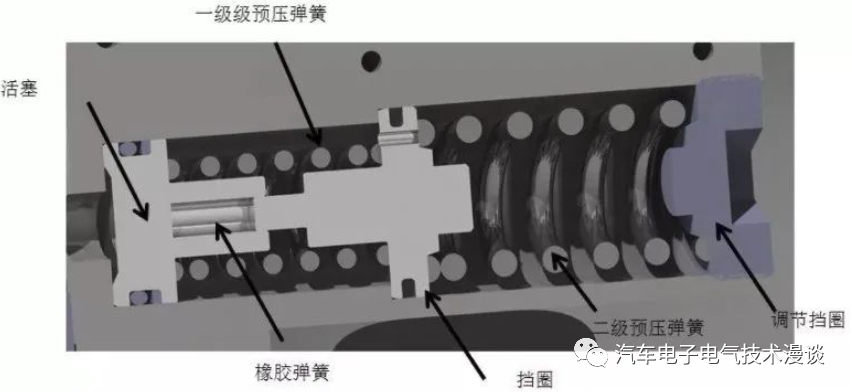
二代踏板模拟器设计
采用三级弹簧带有力量重叠区,过渡力变化区域模拟传统制动脚感,针对不同车型可以通过调节挡圈螺纹深度对二级弹簧的预压力来微调踏板感的软硬。
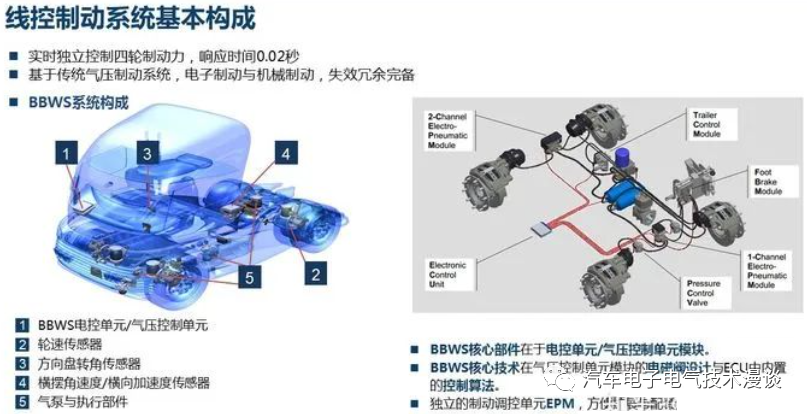
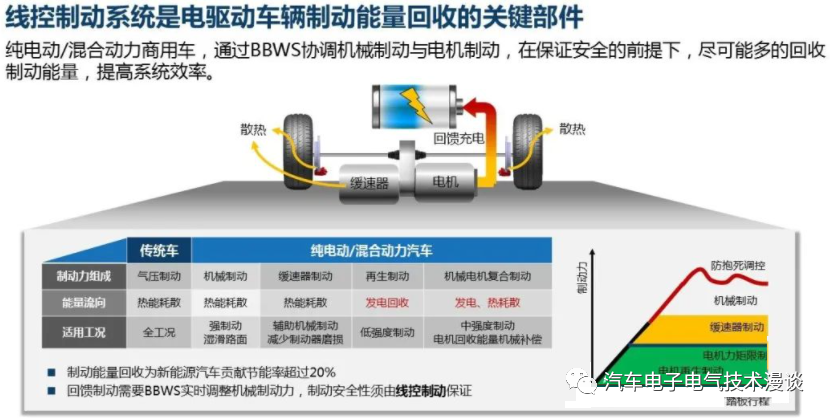
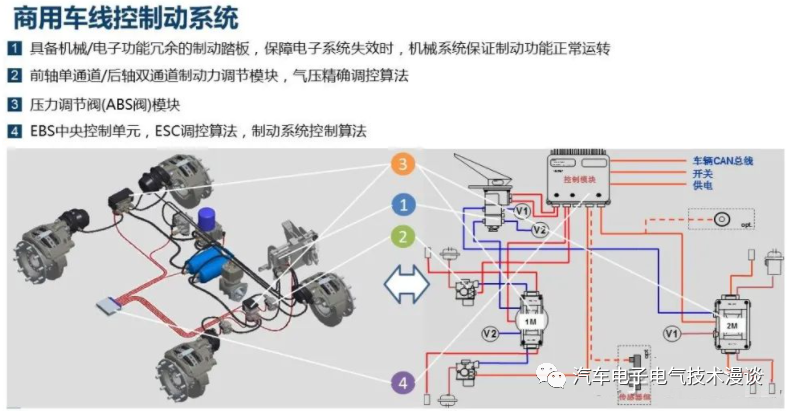
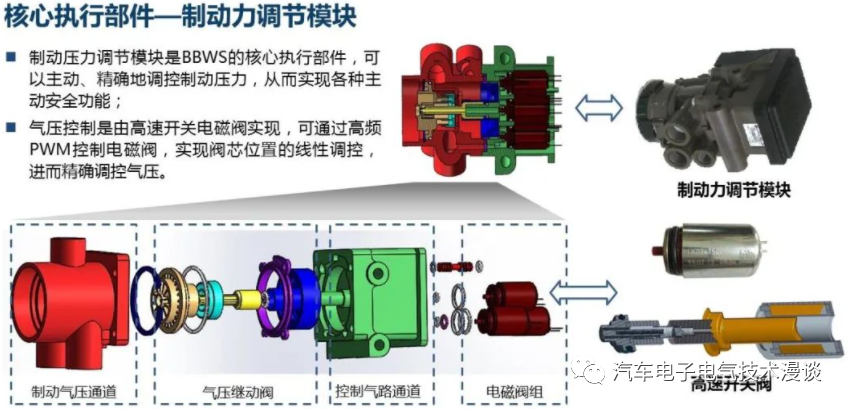
6.线控气压制动系统

四、原理
1.线控制动助力来源 如何做到常规的线控制动,这得从真空助力器说起。

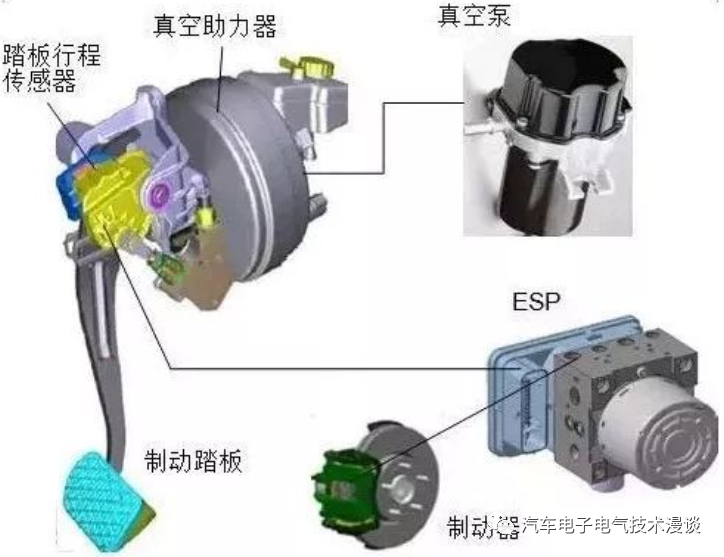
单踏板的杠杆并不足以推动主缸活塞较大的行程,因为制动液(刹车油)是非常黏性的液体,与主缸缸壁之间的摩擦力很大,需要的推力很大,为此使用了真空助力器,真空助力器一般位于制动踏板与制动主缸之间,为便于安装,通常与主缸合成一个组件,主缸的一部分深入到真空助力器壳体内。真空助力器是一个直径较大的腔体,内部有一个中部装有推杆的膜片(或活塞),将腔体隔成两部分,一部分与大气相通,另一部分通过管道与发动机进气歧管相连。它利用发动机工作时吸入空气这一原理,造成助力器的一侧真空,真空源从发动机进气歧管处获得,相对于另一侧正常空气压力有压力差,利用这压力差来加强制动推力。如果膜片两边有即使很小的压力差,由于膜片的面积很大,仍可以产生很大的推力推动膜片向压力小的一端运动。真空助力系统在制动时,同时控制助力器的真空度,使膜片移动,并通过联动装置利用膜片上的推杆协助人力去踩动和推动制动踏板。需要注意推力来自压力差,而非真空。传统刹车系统需要依靠真空助力器,通过真空和大气压的压力差放大踏板输入的压力,否则单纯依靠人力脚踩和杠杆、液压的放大作用不足以形成车轮制动力。
对制动性能要求的不断提高,传统的液压或者空气制动系统在加入了大量的电子控制系统如ABS、ESP等后,结构和管路布置越发复杂,液压(空气)回路泄露的隐患也加大,同时装配和维修的难度也随之提高;使用协调式回收策略,传统真空助力器的制动液压超过跳增值的区域,能量回收系统的制动液压的变化会被驾驶员感知而影响踏板感,因此,只能实现小于0.2g减速度的能量回收。传统制动系统是基于真空助力器的液压制动系统,其真空来源为发动机负压,但是它体积大、响应慢,无法适应新型车辆的需求,不利于汽车轻量化;也无法实现主动制动和制动压力的精确、快速控制,不能满足智能汽车对制动系统电动化和智能化的要求。
为减少驾驶员的体力消耗,汽油乘用车采用真空助力式液压制动(刹车)系统,利用汽油机进气管中的真空度产生助力,帮助驾驶员刹车。真空助力器会减少一部分发动机效率,所以近来有些油车上使用电子真空助力器,用电机制造真空。纯电动车没有装配发动机,混合动力车发动机启停都是常态,电动车和混合动力车不能依赖内燃机取得真空,需要用电子真空泵。对此,有两种解决技术方案:
1)依然使用真空助力,采用电子(电动)真空泵EVP(Electronic Vacuum Pump)获得真空源,采用电子(电动)真空泵产生真空度。
在电机技术不够先进的1999年前,只得放弃这种电机直接推动主缸的思路,转而使用高压蓄能器。这套系统利用电机建立液压,然后将高压刹车油储存在高压蓄能器中,需要刹车时释放。这套系统结构复杂,液压管路众多,成本高昂,可靠性不高。由于成本过高,从2007年起,电子真空泵EVP开始在电动车或混动车上取代这种高压蓄能器设计,EVP极为简单,就是将油车的真空助力器换为电子真空泵获得真空,缺点非常明显,首先它几乎没有任何能量回收,使用叠加式回收策略,EVP与制动系统并联,能量回收率只有ibooster+ESP HEV协调式回收方案的5%左右,能量回收效率远低于线控制动;其次,EVP因自身结构以及转速较高的原因,刹车时会发出刺耳的噪音,噪音小的叶片式真空泵则成本高;EVP方案寿命短,设备常见的使用寿命为600-1200h;EVP方案获得的真空源并不稳定,真空泵产生负压的稳定性受大气环境影响,因此EVP无法在高原地区获得足够的真空度,有高原反应,该工况下刹车助力被削弱;最主要是EVP方案常规制动依然必须由人力首先踩下制动踏板再逐级放大,也就是说它并非线控制动,而是机械制动,满足自动驾驶需求。优点也很明显,首先是EVP电子真空泵虽然对底盘改动小、价格低/成本很低,再者是设计异常简单,油车的底盘几乎不做丝毫改动就可以用来做混动车,这对中国企业来说非常重要,因缺乏自主设计底盘能力。
现有新能源汽车的制动系统主要是采用真空助力器和电动真空泵EVP结合提供负压的过渡产品,这种形式的制动系统未能很好地实现踏板力与车辆制动力之间的解耦和制动能量回收的功能;电动真空泵和真空储能机构的体积和噪声较大,且难以和其他底盘电子控制系统集成。作为线控制动的替代方案,但不是长久之计。
2)放弃真空助力器,转用电子助力器,完全用电机助力来实现,由线控制动系统直接建压。新能源车型没有稳定真空源,线控制动对比电子真空泵优势明显。目前电动汽车更倾向于应用电子(电动)助力器,如日本日立公司推出的e-ACT和博世公司推出的iBooster等,
基本发展路径如下图示。


线控制动正是从真空助力器延伸开来,用一个电机来代替真空助力器推动主缸活塞。由于汽车底盘空间狭小,电机的体积必须很小,同时要有一套高效的减速装置,将电机的扭矩转换为强大的直线推力,这其中的关键因素就是电机主轴。随着电机技术的
发展,在2009年首次推出电液线控制动系统E-ACT。大部分日系混动或纯电车都采用这种设计。用直流无刷超高速电机配合滚珠丝杠直接推动主缸活塞达到电液线控制动,这套方案对滚珠丝杠的加工精度要求很高。传统的液压制动系统反应时间大约400-600毫秒,电液线控制动大约为120-150毫秒,安全性能大幅度提高,百公里时速刹车大约最少可缩短9米以上的距离,同时用在混动和电动车上,可以回收几乎99%的刹车摩擦能量。使用协调式回收策略,ibooster与ESP HEV协调最高可回收0.3g减速度,在制动频繁的城市路况下,续航里程增加10%-20%;是目前公认最好的制动方式。为了保证系统的可靠性,这套制动系统一般都需要加入ESP(ESC)做系统备份。这类制动系统具备变助力比功能,能提供较好的驾驶感受、实现部分能量回收和主动制动功能。然而,该类制动系统仍然无法实现踏板力与车辆制动力之间的解耦及单轮制动力调节,要实现上述功能,需要额外添加器件,增加系统的复杂度。2.工作原理
线控制动系统将原有的制动踏板用一个模拟发生器,用来接收驾驶员的制动意图,产生、传递制动信号给控制器和执行机构,并根据一定的算法模拟反馈给驾驶员,如下图。
传统液压制动系统实现车辆制动功能是直接通过液压装置来传递和实施的,而线控制动系统则是利用物理信号传递制动信息,使用电子控制单元控制机电一体化装置来实施制动。线控制动简单理解是电开关版的蝶式刹车,不需要再经过油压转换,直接让电控单元驱动活塞,卡钳夹紧制动片以达到刹车制动效果,从而直接实现“电”信号对制动系统更直接的管理。下面分别简述EHB和EMB的工作原理和特性。
(1)EHB 系统
EHB原理:电机液一体化,电机取代真空助力器

汽车驾驶员的制动动作被踏板上的传感器感转化成电子信号,电子控制单元接受到信号后,命令液压执行机构完成制动的操作。EHB能根据路面的附着情况和转速为每个车轮分配最合理的制动力,从而可以更充分地利用车轮和地面之间的摩擦力,使制动距离更短,制动过程更安全。

电子液压制动系统示意图
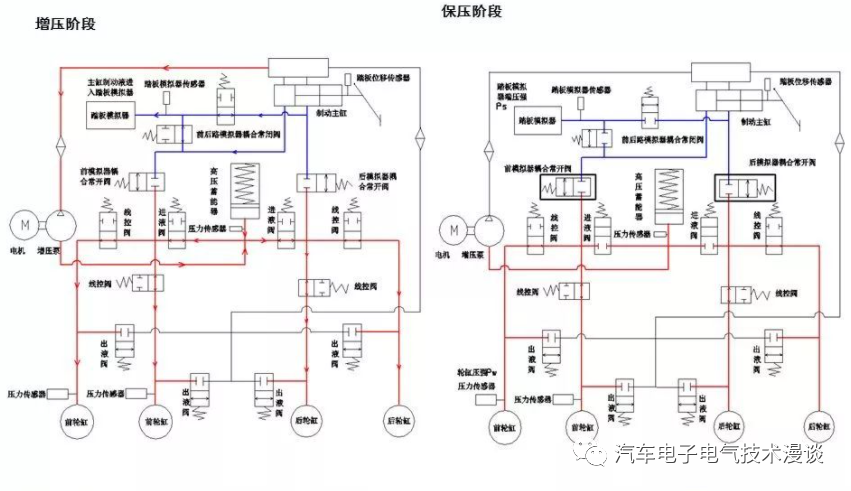
当驾驶员踩下制动踏板时,制动(电子)踏板配有踏板感觉模拟器和电子传感器,集成在制动踏板上的传感器将制动踏板的行程及驾驶人踩下控制踏板时的速度,转换为电信号传递给制动控制单元(ECU),ECU通过CAN 总线与外部系统交流,综合其它电信号判断车辆的运行工况,ECU可以通过传感器信号判断驾驶员的制动意图,计算出每个车轮的最佳制动力,并通过智能接口输出控制信号到液压系统,液压系统中包含由电动油泵和高压蓄能器组成的液压供给部分和车轮制动压力模块,车轮制动压力模块独立的控制和调节各个车轮制动器中的油压大小,进液阀开启,液压供给部分的高压油液进入车轮制动器,通过电机驱动液压泵进行制动,使制动器工作对车轮产生制动力。当减小车轮制动强度或解除制动时,出液阀开启,车轮制动器中的油压降低,制动力也随之减小,直至制动器完全退出工作(上图 )。轮缸里面的制动液不是通过主缸过来的,是通过高压蓄能器里面,通过液压泵来提供一个压力源,提供一个制动液源,来进入轮缸,达到需要的制动的制动力。EHB系统的车轮制动压力模块能根据汽车行驶工况要求,计算出各车轮需要的制动力并分别进行控制,所以,EHB系统能够有效减少车辆制动距离,提高行驶安全性。此外,为了使驾驶员对于制动强度有直观的感受,线控制动系统中通常采用踏板行程模拟器,踩制动踏板的行程越大,模拟器上的阻力也就越大,使驾驶员在使用线控制动系统时和使用传动的液压制动系统感受基本相同。
正常工作时,制动踏板与制动器之间的液压连接断开,是完全解耦的,备用阀(隔离阀/开关)处于关闭状态。打开进油阀和关闭出油阀,制动液从蓄能器通过进油阀进入制动轮缸实现增压;打开出油阀和关闭进油阀,制动液从制动轮缸通过出油阀返回制动液罐实现减压;进油阀及出油阀均处于关闭状态则实现保压。当需要单独控制某侧制动轮缸压力时需要关闭平衡阀,由其对应的进油阀和出油阀工作。
为防止EHB系统失效造成制动失灵,EHB系统仍然保留着传统的液压制动系统,当电子系统发生故障时,EHB系统失效时,备用开关(阀)打开(上图),制动踏板连接的制动主缸通过备用开关(阀)连接各个车轮制动器的制动轮缸,进入常规的液压系统制动模式,EHB系统变为传统的液压系统,保证车辆制动的基本需要。这时假设液压泵坏了,这个油进去了,但是备用阀打开之后,那么从制动踏板和主缸过来的制动液,还是可以进入相应的轮缸,达到一定常规制动的效果,所以这是一个安全性的保证。制动踏板输入信号后驱动制动主缸中的制动液通过备用阀流入连接各个车轮制动器的制动轮缸,进入常规的液压系统制动模式,是保证车辆制动的必要安全保障。
当EHB的供能装置出现故障时隔离阀无法打开,驾驶员仍能通过踩下制动踏板将制动主缸内的制动液经隔离阀和制动管路送入制动轮缸,实现一定强度的制动。
备用系统增加了制动系统的安全性,使车辆在线控制制动系统失效时还可以进行制动。当制动器涉水后,EHB系统可以通过适当的制动动作,恢复制动器的干燥,保持制动器的工作性能。由于EHB采用了线控技术,在制动器和制动踏板之间没有液压或机械连接,因此,当制动强度过大,进行防抱死调节时,制动踏板上感受不到由于液压管路油压波动产生的反冲作用力,提高了驾驶员的操作舒适性。
(2)EMB系统
EMB原理:电机一体化,电机直接驱动制动器
EMB系统的主控制器(制动控制单元ECU)工作时通过接收踏板位移传感器传来的踏板行程的位移信号,ECU计算出踩制动踏板的速度信号并结合整车其他ECU发出的车速信号、方向盘转角信号等相关信号,明确汽车行驶状态,分析各个车轮上的制动需求,计算出各个车轮的最佳制动力矩大小后输出对应的控制信号,分析后向4个车轮制动模块发出制动指令,控制四个独立的控制器向对应的电机发出制动信号,分别控制各车轮上的电子机械制动器中工作电机的电流大小和转角,通过电子机械制动器中的减速增矩以及运动方向转换,将电机的转动转换为制动钳块的夹紧,产生足够的制动摩擦力矩。电机通过减速机构将电机扭矩转化为所需的制动力,车轮制动模块上的电机驱动制动摩擦材料块,然后实现摩擦制动。每一个车轮都有一个制动模块,可以单独分别控制,每个模块的驱动电机也都有单独的电机控制器。车辆转向时,每个车轮制动系统分配的制动力不一样,4个模块作用下,实现制动力分配,制动稳定性控制等功能,从而达到平稳转向的目的。踩一下自动踏板,通过自动踏板传感器得到驾驶员的驾驶意图,通过ECU处理之后直接驱动车轮上面的制动模块,这里是四个电机直接进行制动。制动力矩完全是通过安装在4个轮胎上的由电机驱动的执行机构产生,驱动和控制执行机构电机来产生所需要的制动力。
电子机械制动系统
线控制动系统在原理上带来革新的同时也产生了一个不可忽视的问题:线控制动系统的制动增益系数与传统的液压制动系统相比较低,由于制动电机的增多以及功率的加大,这就使得线控制动系统需要消耗过多的车载能源,再加上受到车载电气系统的限制,12V电源无法满足制动需求,12V电源成为限制EMB发展的重要因素,电子机械制动系统的应用一直得不到广泛的推广。EMB相对汽车的应用来说,太过超前,而且同时由于没有备用的制动系统,安全性还有待提升,安全冗余一直被业界质疑。
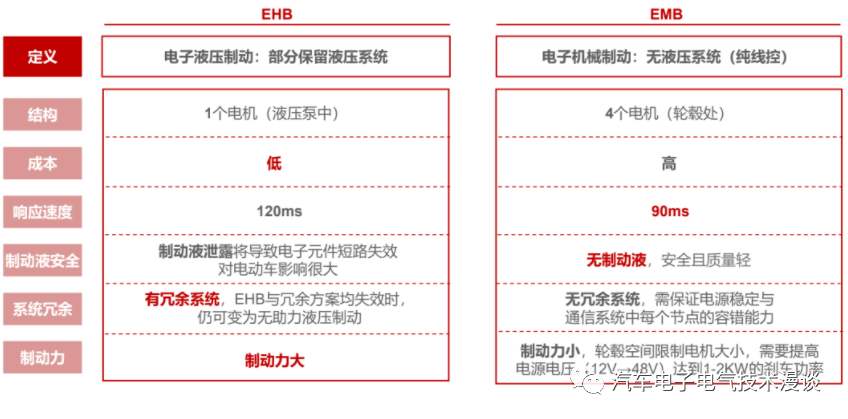
(3)EHB与EBM差异
EHB和EMB在传力路径上有很大不同,工作原理和特性也有差别:
这两种制动系统各有优势,也都有各自的缺点。
EHB制动系统仍然保留了制动液,仍包含复杂的制动液传输管路,系统液压管路布置复杂且难以集成驻车制动;虽然EHB能完全独立于制动踏板而进行制动,但是其物理线路没有延伸到车轮制动器,仍需要制动液将制动能量从蓄能器传递到制动轮缸,连续制动时,由于高压蓄能器压力的衰减,维持响应速度与精度能力均不及EMB,使得EHB并不完全具备线控制动系统产品的优点,EHB并非终极方案;这类制动系统具备变助力比功能,能提供较好的驾驶感受、实现部分能量回收和主动制动功能。然而,该类制动系统仍然无法实现踏板力与车辆制动力之间的解耦及单轮制动力调节,要实现上述功能,需要额外添加器件,增加系统的复杂度。
从本质而言,电子液压制动系统EHB并不是真正意义上纯粹的线控制动系统,它需要液压系统放大制动能量。但就目前而言,这种结构相比于其他线控制动系统具有一定的优势,因为EHB是从传统液压制动系统进化而来,具有冗余系统,它基于传统液压制动系统,原有的液压制动系统结构得以保留,易于实现失效备份,可以使用人力在供能装置失效的情况下作为备用制动选项,就是液压管路的方式是有液压后备的,一旦线控失效之后,制动液还会从正常的液压管路进入轮缸,可以提供部分的制动效能,使车辆在线控制系统失效时还可以进行制动。具备可靠的机械备份,即车载电源失效时启用纯液压助力。备用系统增加了制动系统的安全性,安全性上有一定的保证,安全稳定才是刹车系统的第一要务,其高安全性在用户的可接受性方面更具优势。且此类产品成熟度高,兼具液压制动系统高制动增益系数和线控制动的优点,可以实现新能源车所需要的协调式制动策略,得到汽车零部件生产厂商的重视。
目前行业内研究的主要方向是EHB,很大的一部分原因是具有备用制动系统,是现阶段的首选方案,是当前主要推广量产的方案,目前已实现应用。目前线控制动系统更多的应用形式是EHB,这是汽车电动化以及智能化发展所必需。EHB是制动系统革命性产品,是智能驾驶的关键执行部件,对智能网联汽车的发展具有重大推动作用,已成为行业公认的下一代汽车制动系统主流解决方案。
EMB可以将传统制动系统中的液压油或空气等传力介质完全由电制动取代,直接将输入与终端执行之间的部件全部简化,因此只有EMB是完全的线控制动,因结构简单、制动效果好、易于与其他电控功能集成在一起,与EHB相比,EMB是更优的方案,它不以制动液为工作介质,控制响应更加迅速精确,逐渐成为汽车制动系统的研究热点。虽然具有诸多优点,但EMB没有机械冗余,没有液压后备制动系统且缺乏技术支持,很难满足失效备份的需求,一旦执行机构或者EMB系统出现问题的话,常规制动可能就没有了,没有保险措施,在安全性上面可能会有一些顾虑。必须具有很高的设备可靠性、总线协议和抗信号干扰能力,尤其是需要解决车载电源失效问题。此外,刹车片产生的高温巨震环境对电机稳定性、芯片半导体和永磁材料造成巨大考验,短期内难有突破。其制动力能力依赖于较大的驱动功率,必须配备42V电源系统,更为关键的是,EMB系统不能满足现行法规对制动系统失效备份的需求。虽然国内外企业与高校均研发EMB原理样机,目前EMB还处在研究阶段,由于缺乏足够的技术支持,但还不具备进入市场的条件。
EMB理论上完美,但由于技术条件较高,成本较高,冗余备份,电机性能等限制以及热可靠性技术等还需完善,这些问题都阻碍了EMB系统在短期内的量产,应该说比较长的一段时间内很难大批量应用,至少在国内肯定是一个长时间的过程,目前市场上并没有批量装车的EMB产品。
因此综上所述,线控化的EHB系统仍然是最为可行的制动系统方案。现在汽车上的线控制动还是集中在EHB,而且还没有对传统制动系统构成威胁。EMB虽然有着比传统的液压制动器和EHB两者都无法比拟的优势和广阔的运用前景,虽然是未来制动系统的终极发展方向,必然是未来的趋势,可能成为主流,但EMB技术在汽车上的应用并不成熟,短期内难以量产,未来5-10年线控技术的主流仍是EHB方案,仍以EHB为主,EHB为现有技术条件下的主要方案,是现在研究的主流方向或者说是在目前状态下主要研究的一个产品。若材料方面无法突破,EHB占据主导地位的时间将更久。只有解决了一些制约其自身发展的关键因素,才能得到越来越广发应用。目前来看EMB商业化之路的优先级明显低于EHB,但是从线控制动系统长远发展来说,它是一个未来发展的方向,是线控制动最终形态。EHB系统仅仅只是一个先期的产品,EHB是传统液压制动到EMB的一个过渡产品,最终的产品一定是一个EMB系统。EMB的可靠性对其商业化有着至关重要的作用。 EMB技术肯定会得到大力的发展,未来会向液压制动系统发起强有力的挑战。线控制动的发展之路还任重道远。

EHB与EMB主要不同点:
1) EMB减少机械连接件和阀类元件,一方面使得结构更加紧凑,减轻车重,提供更大的内部空间,便于布置、装配和维修;另一方面电信号传递更迅速、高效;
2) EMB需要对底盘进行更大范围的改造,造价高;
3) EMB不存在液压油泄露问题,电池更加安全;
4) EMB便于集成其他电控系统,如ABS、ESP、自动驾驶、能量回收等;
5) EHB 可以打开液压管路备用阀作为其中一道安全失效模式,EMB则没有机械冗余。
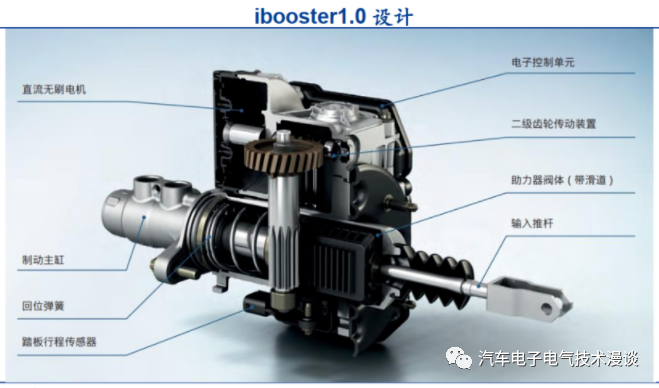
(4)线控制动两种技术路线:EHB与EMB
EHB(Electro-hydraulic Brake)保留传统的液压工作方式,博世ibooster和采埃孚EBB(Electronic Brake Booster)都是vacuum booster真空助力器的局部替代方案。ibooster制动信号的产生可以来自踏板,踏板行程传感器测量到输入推杆的位移后,将该位移信号发送到ECU,由ECU计算制动请求;也可以由ECU根据场景需要主动生成制动需求。ECU计算出电机应产生的扭矩,二级齿轮传动装置将该扭矩转化为助力器阀体的伺服制动力,通过电机转化为强大的直线推力,推动制动主缸推杆。
与EHB相比,EMB主要组件差异是系统内没有制动液。燃油车EHB主要适用智能驾驶的场景,新能源车EHB适用于智能驾驶、能量回收等多场景。
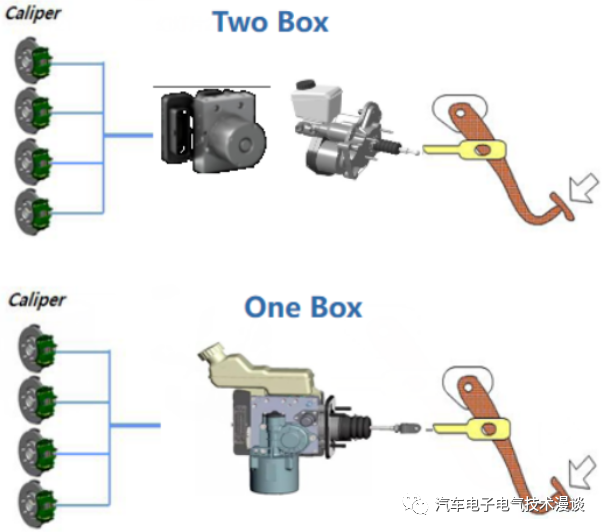
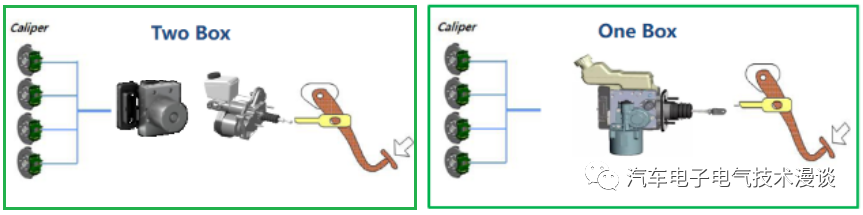
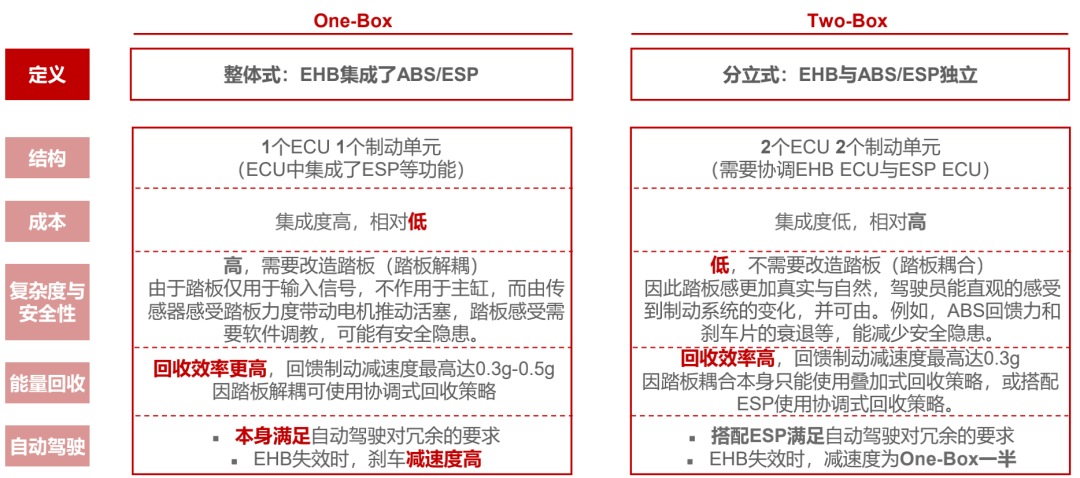
(5)线控制动EHB路线BOX之争:One-Box vs. Two-Box
确定了EHB的技术路线,接下来就是具体的实现方法了,目前EHB的线控制动方案又出现了两大流派: Two-Box 和One Box。但作为线控制动,无论是Two-Box还是One-Box,相比较传统制动系统,都有非常优秀的性能体现。
Two-Box和One-Box又有各自的优劣势,要评价二者优劣,必须对它们的性价比进行一次分析。 One-Box较Two-Box性能上更具优势,但Two-Box目前安全性更有保障,One-Box需要看踏板调教的安全性。One-Box的集成度更高,是未来的主流方案。 One-Box方案集成ESP,需以成熟ESP技术为基础,Two-Box方案协调ESP,可通过外采ESP降低技术难度。
One-Box方案由于将ESP集成在EHB中,更需要以成熟的ESP量产经验为基础,由于其在性能、成本等方面的优势,博世、大陆、采埃孚正在逐步加码One-Box产品,有望成为市场主流。同时,EHB在新能源汽车的渗透率更高且增速更快,国产One-Box方案在价格上较主流Two-Box方案具有明显优势,具备先发优势的自主供应商有望实现国产替代。
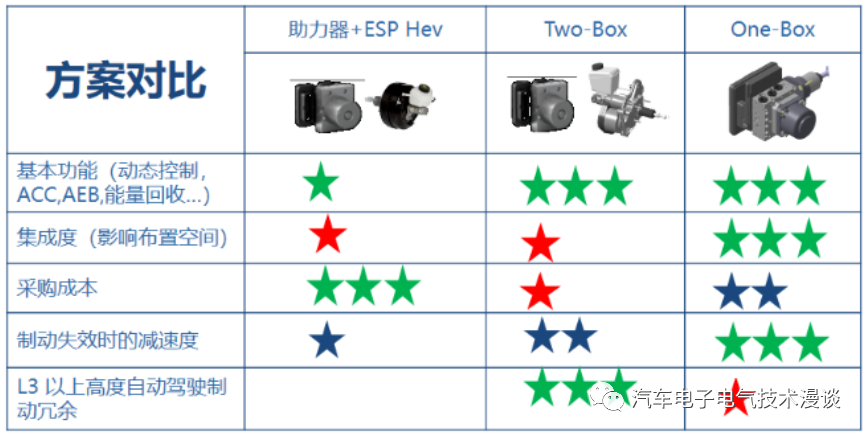
从对比来看,Two-Box相比较One-Box最大的优势在L3自动驾驶工况下的制动冗余需求,抛开这一点One-Box完胜。 L2级别的自动驾驶明确了是要驾驶员主导操作车辆的,而L3则是有限条件下的自动驾驶,也就是说它可以完全不需要驾驶员干预,但是有的时候又必须驾驶员干预。
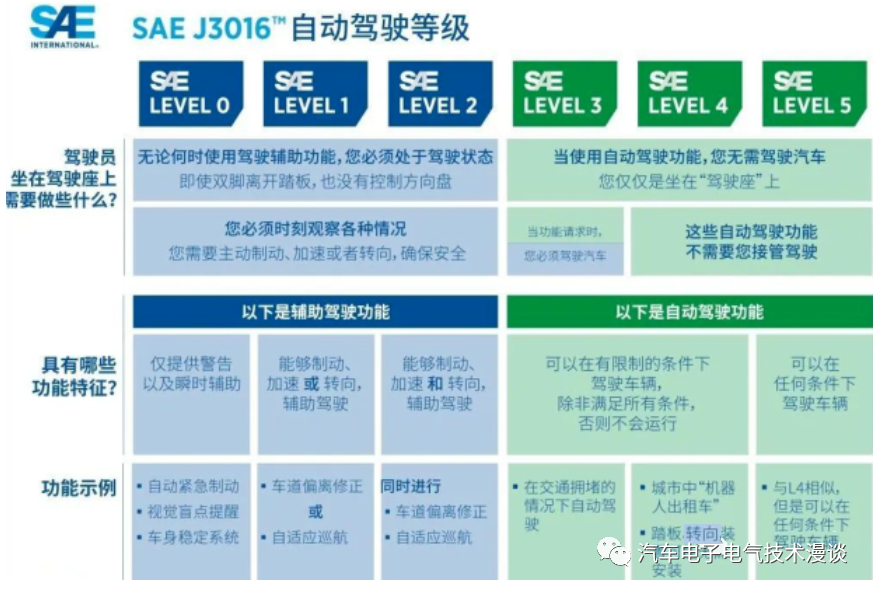
驾驶员和车辆自主控制之间如何相互接管就成了一大问题,因为这之间并没有一个明显的界定,所以假设出了交通事故,是需要驾驶员和汽车共同承担责任,而这也是相关法律法规最模糊的地方,基于这样的模糊定义,现在的L3的定义被大范围的诟病。
甚至不少品牌直接放弃了L3级别自动驾驶的研发,比如福特、沃尔沃就表示会直接从L2到L4,电动车企蔚来也表示会跳过L3,直接进入L4。而以自动驾驶闻名的特斯拉自始至终都没有给自己的产品定过级,只表示会进入L4时代。
之所以大部分厂商在向L3不遗余力,其实更多是为了避免被扣上“无创新”的帽子。实际上,法规、技术等层面上,L3的发展远比想象的要复杂得多。
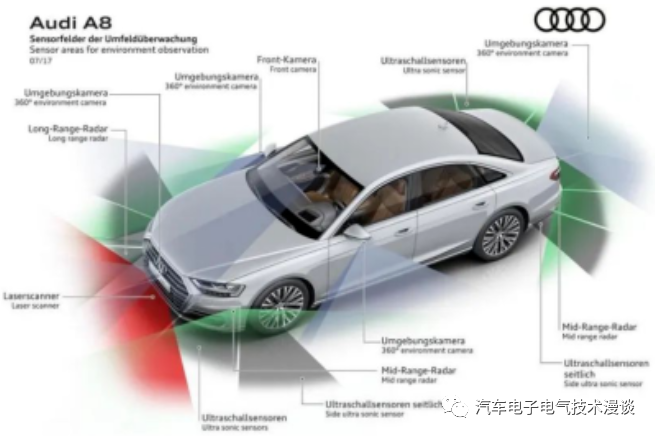
奥迪曾经在L3领域投入数十亿欧元的巨资研发,这已经接近A8的研发费用了。奥迪将L3级别自动驾驶的弱化,更像是在L3遇到瓶颈迟迟不能在量产车上实现之后,奥迪认清了L4才是正确方向。
一些大的供应商,比如BOSCH ,在它的WHA系统在实施车辆变道动作时,只允许车辆脱离控制20s,它是实现了L3的定义功能的,但是它又不允许用户完全放开接管车辆,无限接近L3的功能但是不脱离L2的定义,是现阶段最稳妥也最常见的做法,所以有了越来越多的L2+和L2.5,至于L3,没有哪个供应商能给到明确的时间。

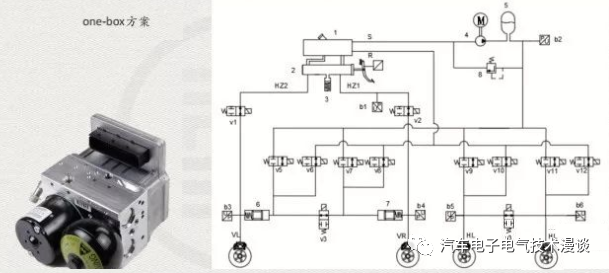
所以现在行业里慢慢形成了共识,One Box是目前新能源车型线控制动较为理想的解决方案。
一句话总结核心原因:LV3自动驾驶遥遥无期,但能量回收的需求确实迫在眉睫。在满足当前核心需求的前提下,肯定选择性价比最高的方案。 但就目前市场出货量来看,还是以BOSCH的iBoost+ESP的Two-Box 出货量最大。 分析大众集团大规模的采用了Two-Box 方案,其原因大概是因为大众同一平台应用车型众多,为了兼顾高-中-低端车型的需求,用Two-Box最为经济,比如MQB平台下的奥迪/斯柯达/大众/西雅特都有车型应用,如果采用One-Box方案,那只有唯一的选择,无论高中低端车型必须用One-Box,而采用Two-Box方案,相对来说灵活性更高一点,比如低端车采用传统的助力器+ESP,而高端车采用iBoost+ESP这样就避免的大规模更改的成本增加。
现在这些大的供应商也意识到在当前5-10年之内,L3以上的自动驾驶还将处于叫好不叫座的尴尬状况,而能量回收、EVPHEV却是不折不扣的大量涌现。没有自动驾驶制动冗余这一紧箍咒之后,One-Box成了线控制动的最佳选择。所以各供应商也都在积极的开发自己的One-Box产品。
EHB将采取one-box方案
定义one-box方案和two-box方案的标准在于ABS/ESP系统是否和电子助力器集成在一起。以ibooster为例,必须和ESP HEV配合才能与踏板解耦,采用协调式能量回收策略,否则未完全与踏板解耦,踏板力和电机共同作用产生主缸制动力,只能采用叠加式回收策略,制动效果和回收效率大打折扣。未来集成化的one-box方案必然会取代two-box。
相较于two box,one-box体积和重量大大缩小,成本更低,但由于技术问题量产时间更晚。博世第一代、第二代ibooster均采用two-box方案,最新一代IPB则采用one-box方案;采埃孚EBB属于two-box方案,IPB属于one-box方案;大陆MK C1和伯特利WCBS直接采用one-box方案。
4 线控制动BBW技术研究
智能汽车对制动系统提出的主要需求包括:电动助力、主动制动、线控制动及失效备份等功能。
汽车线控制动技术主要由检测的反馈系统、信号的处理单元、执行器等多项结构组成,所有环节相关联系,相关作用,根据其本身独立的功能工作,以推动系统能够稳定的运行,使以充分发挥。例如在检测反馈系统中,是将各种传感器中检测的信号进行放大、转换,显示出反馈的信号。
(1)BBW制动力分配
传统的液压制动系统中制动主缸与制动轮缸之间通过液压管路直接相连,这使得制动主缸的压力与各车轮的制动压力之间存在一个确定的关系,通常前轮制动压力等于主缸压力,后轮制动压力与前轮制动压力成一个确定的比例关系,同一车轴上左右车轮的制动压力则是相等的。受此硬件条件的限制,液压制动系统在设计制动力的分配时做了一定的折衷.这使得在制动过程中,制动压力无法在前左右四个车轮之间进行动态的,合理的分配,从而在大多数情况下,各个车轮的附着条件无法得到充分的利用,不能有效的缩短制动距离,甚至可能发生后轮先于前轮抱死,后轴发生侧滑,导致危险的事故。
BBW系统是由电机来提供制动力,由于其具有结构简单,质量轻,响应迅速,易于采用模块化结构,易于进行改进与增加功能等诸多特性,成为了一个研究的热点。控制动系统中制动踏板与制动器之间仅通过电路相连,当驾驶员踩下制动踏板时,制动压力可以在四个车轮之间进行灵活的分配。为了使各个车轮的附着条件均得到充分的利用。
线控制动系统制动力分配策略研究
本文提出了基于各车轮垂直载荷的线控制动系统制动力分配策略。为了验证该分配策略的有效性,通过联合MATLAB/Simulink与车辆动力学软件Carsim。分别在直道与弯道制动的情况下对线控制动车辆与液压制动车辆进行了对比仿真。
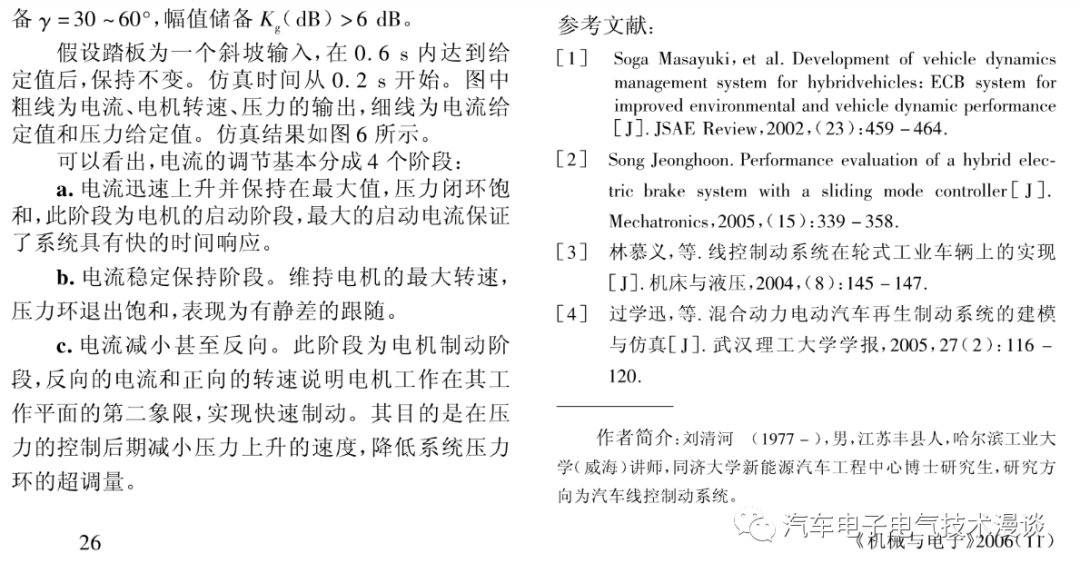
-1 控制动系统的结构和工作原理
线控制动系统的基本组成如下图所示.它主要包括制动踏板模块、中央控制器、车轮制动模块、通讯网络、电源模块等部分。
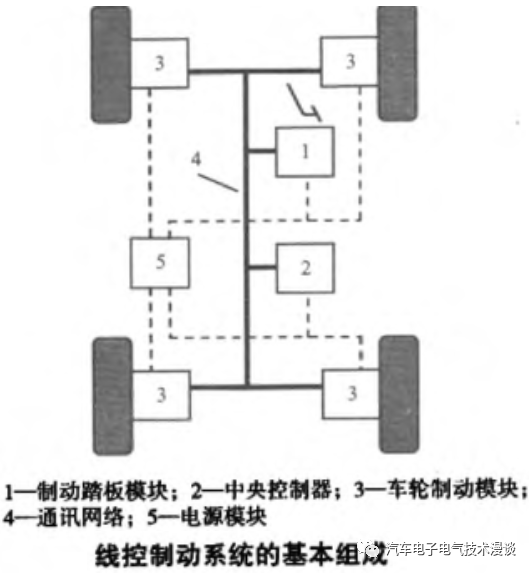
当驾驶员踩下制动踏板时,制动踏板模块通过压力传感器和角位移传感器辨识驾驶员的制动意图.中央控制器根据驾驶员的制动意图,并结合整车纵向加速度传感器、整车侧向加速度传感器以及轮速传感器等传感器的信息,按照一定的分配策略,计算各个车轮制动力的大小,井将计算结果通过通讯网络传人各车轮制动模块,车轮制动模块控制电机来实施制动。电源模块用于给系统的各个部分提供能量。 控制动系统的制动力分配策略 -2.1 最优的制动力分配 动力分配进行了研究,并将牵引系数(Ⅱ卵-tioncoemcient)定义为制动力与车轴动态载荷的比值,如式(1)所示;

其中芦。为第i车轴的牵引系数,n为第j车轴的制动力,如为第i车轴的动态载荷。在任何程度的减速情况下,施加合适的制动力使前后车轴的牵引系数相同,直到两个车轴同时达到附着极限,这就是最优的制动力分配。此时,等式(2)是成立的:  其中pⅣ和p。分别为前后车轴的牵引系数,a为整车的减速度(以重力加速度g为单位)。车辆在弯道上制动时,同一车轴上左右车轮之间的垂直载荷并不相同。类比于直道制动的情况,若要使制动力分配最优,须施加合适的制动力使四个车轮的牵引系数相同.直到四个车轮同时达到附着极限,如式(3)所示。
其中pⅣ和p。分别为前后车轴的牵引系数,a为整车的减速度(以重力加速度g为单位)。车辆在弯道上制动时,同一车轴上左右车轮之间的垂直载荷并不相同。类比于直道制动的情况,若要使制动力分配最优,须施加合适的制动力使四个车轮的牵引系数相同.直到四个车轮同时达到附着极限,如式(3)所示。

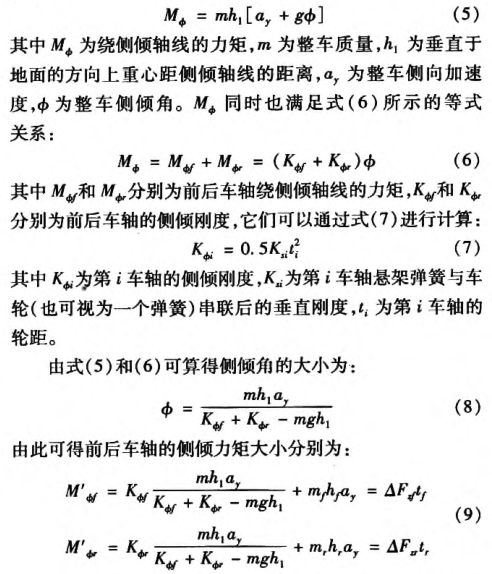
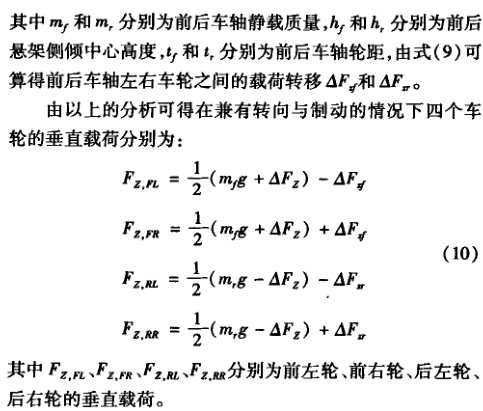
-2.2 制动过程中纵向及侧向载荷的转移 由以上分析可知,要合理的分配制动力,必须实时的估计制动过程中各个车轮上的垂直载荷。当车辆在直道制动时.可以利用整车参数和纵向减速度,通过式(4)来估计前后车轴之问的载荷转移:

其中4B为前后车轴之间的载荷转移,m为悬挂质量m和m。分别为前后车轴的非悬挂质量,‘和‘分别为前后车轮的转动惯量h。为悬挂质量重心高度,h为非悬挂质量重心高度£为轴距,r为车轮半径.a为整车纵向减速度。载荷在左右车轮之问的转移可以通过整车参数和侧向加速度来估计1。将连接前、后悬架侧倾中心的直线定义为侧倾轴线,当整车存在侧向加速度时,侧倾轴线的力矩大小为:
-2.3 直道上制动时的制动力分配策略

当车辆即将停下时,由于悬架的振动,使各车轮的垂直载荷发生较大的波动,由此将导致后轮的制动压力也存在较大的波动。因此,当车速低于3km/h时,使线控制动系统的制动力的分配方式与液压制动系统相同。 -2.4 弯道上制动时的制动力分配策略 弯道上制动时先根据前后车轴总的垂直载荷来分配前后车轴总的制动压力,其数值大小与3.3中所算手导的各车轴总的制动压力大小相等。然后再将总的制动压力在左右轮之间进行分配,使左右轮压力之比等于垂直载荷之比,最终各个车轮之间的制动压力将满足式(3)所示的最优关系。同样为了避免车辆即将停下时制动压力的大幅波动,当车速低于3kra/h时,使线控制动系统制动力分配方式与液压制动系统相同。 (2)EHB液压力控制 传统制动系统由于制动踏板与主缸活塞推杆之间的机械连接未解耦和真空助力器的非线性使主缸液压力难以精确控制。 对于EHB系统,液压力控制的平稳、精确、快速是汽车对于制动系统的基本要求。汽车的电动化和智能化对液压力控制算法的控制精度、适应性和鲁棒性要求进一步提高。液压力控制算法对整车的制动舒适性和操纵稳定性影响也有待进一步讨论。
从主缸液压力控制和轮缸液压力控制这两大层面对EHB系统液压力控制方面的国内外发展现状进行深入研究。
1. 液压力控制架构
1.1 电子液压制动系统的液压力控制架构
液压力控制是EHB的基本功能,也是车辆稳定性控制系统和再生制动系统等的关键技术。因此,液压力控制的性能优劣是整车性能的重要一环。液压力控制层是整车控制系统的最底层,所以整车控制效果的优劣与液压力控制密切相关。如果没有液压力控制模块或者液压力控制模块不能有效对液压力施加控制,那么整车控制系统的控制性能会受到很大影响。与此同时,液压力控制方法是伴随着整车控制系统的变化而不断发展的。
国外知名整车和零部件公司等均提出了电子液压制动系统方案及其液压力控制方法。
电子液压制动系统液压力控制架构
轮缸液压力控制层面又分为轮缸液压力上层控制和电磁阀底层控制。前者用于计算出电磁阀的控制指令;后者用于确定电磁阀的控制方法。EHB系统的液压力控制架构如上图所示。 2. 主缸液压力控制电磁阀控制
在ESC中,电动机液压泵的能力和HCU的限制对控制效果有很大影响,此时如果能够对主缸液压力精确控制,会较大改善控制效果和提高车辆稳定性。
传统制动系统不能满足要求,而EHB系统能够精确控制主缸液压力,即利用一定的控制算法计算出电动机或电磁阀的控制指令,稳定、准确、快速地跟踪目标主缸液压力,从而满足制动系统的新要求。其中,
液压驱动单元属于「电动机+减速机构」形式的EHB系统对主缸液压力控制的过程实际上是对电动机的控制过程,控制器输出为电动机的命令电流或命令力矩;
液压驱动单元属于「液压泵+高压蓄能器」形式的EHB系统对主缸液压力控制的过程是对电磁阀的控制过程,控制器输出为电磁阀的控制指令。
现有的主缸液压力控制方案如下表所示。
电子液压制动系统主缸液压力控制方案
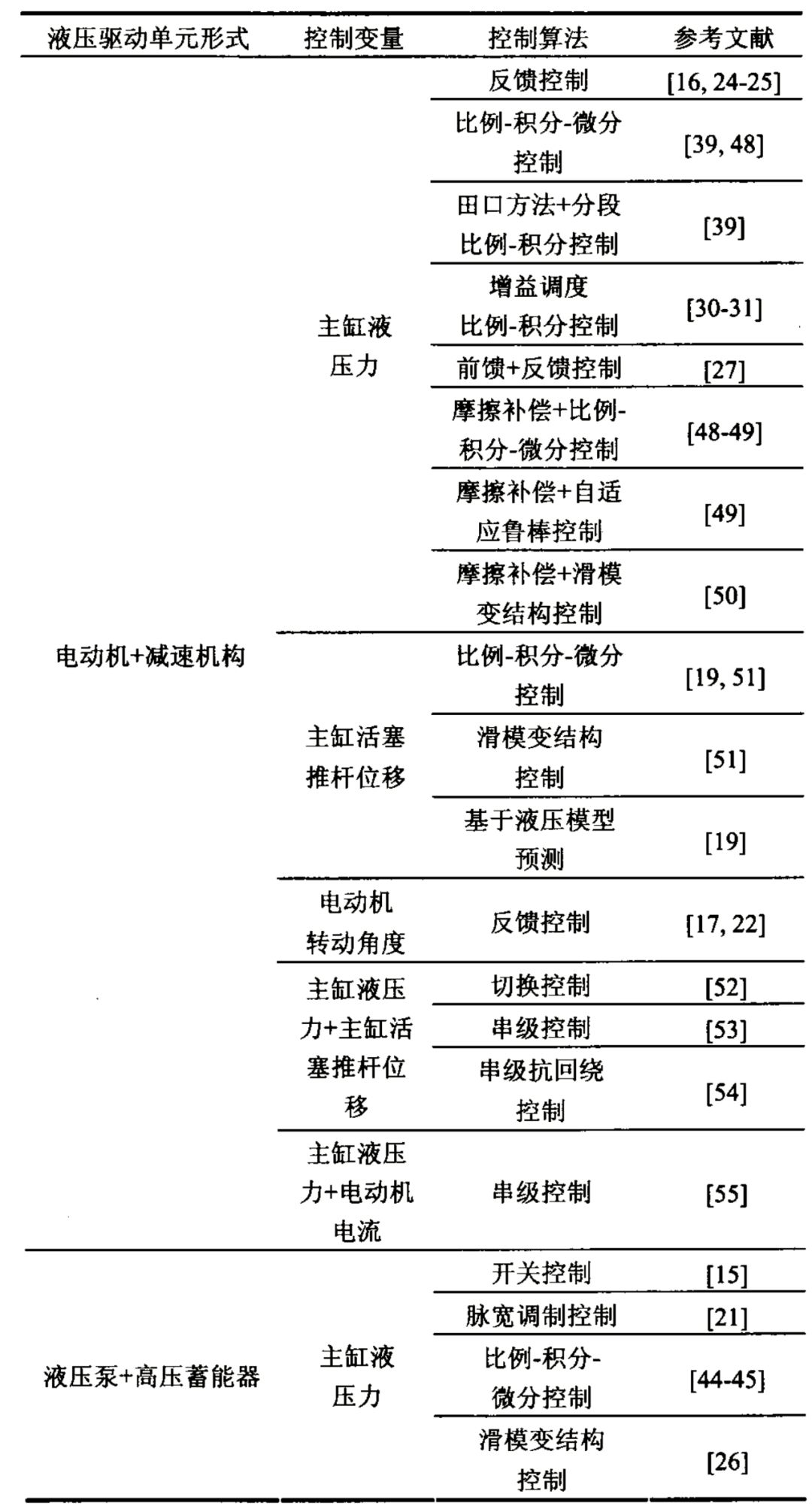
2.1控制变量
对于液压驱动单元为「电动机+减速机构」形式的EHB系统,主缸液压力控制效果的直接判据是主缸液压力。因此,直接以主缸液压力作为控制变量,其优点是观测容易,而且对制动系统的改造不大而易于实现,但由于液压系统PV特性在低压工作点处存在死区,所以低压范围不能实现精确控制。间接以主缸活塞推杆位移为控制变量,解决了上述以主缸液压力作为控制变量存在的问题,但主缸活塞推杆位移传感器不易布置且成本较高。对此,MK C1和IBC在电动机内部安装转角传感器,以电动机转动角度为控制变量,实际上能够间接得到主缸活塞推杆位移,从而对主缸液压力进行控制。
对比以上几种单控制变量的控制系统,在液压闭环控制时,存在「残留液压力」问题,此时主缸活塞将不再动作而「滞留」在非零压处。虽然企业中对于「残留液压力」的要求有一定容许量,但是如果主缸活塞一直「滞留」,那么制动系统将变得越来越「硬」,从而影响正常工作。相比于液压闭环控制,位移闭环控制没有主缸活塞「滞留」问题,但也存在不足:如果位移控制指令由一较大目标值变为零,此时主缸活塞回位时由于运动惯性可能出现超调,从而导致与壳体或其他部件撞击,产生工作噪声,并影响零件寿命。
还指出以主缸液压力或主缸活塞推杆位移为控制变量的单控制变量控制系统面对系统参数变化和外界扰动时的鲁棒性和适应性不高。为了提高系统性能,设计了以主缸液压力和主缸活塞推杆位移为双控制变量的控制系统。其中,采用位移控制器能够快速建压并消除「残留液压力」的问题;采用液压控制器能够确保目标压力的精确跟踪控制。
设计了以主缸液压力和电动机电流为双控制变量的控制系统。其中,电流环还有一个重要作用就是保持电动机电流在动态过程中不超过允许值。因而在突然施加控制作用时不希望有超调或超调量越小越好。而压力环的作用是保证稳态响应无静差。
对于液压驱动单元为「液压泵+高压蓄能器」形式的EHB系统,控制变量只有主缸液压力 。另外,如所述的传统EHB系统,由于常规制动时主缸与轮缸之间的液压回路被电磁阀断开,而主缸液压回路与踏板模拟器液压回路连通,起模拟踏板感觉的作用,所以传统EHB系统中不存在主缸液压力控制问题。
2.2 控制算法
针对液压驱动单元为「电动机+减速机构」形式的EHB系统进行主缸液压力控制,大多数的控制算法是闭环反馈控制。如ibooster 系统和e-ACT 系统采用液压闭环反馈。这种控制算法的思路是将被控对象输出的实际值与期望的目标值进行对比,然后将二者的偏差经过控制器的处理后输送给执行器。而如何利用好二者偏差进行控制器的设计是这种控制算法设计的重中之重。
研究中多以PID控制算法对主缸液压力进行反馈控制。在具体应用PID控制器时,需要对其控制参数进行整定,以产生适当的输出量来控制电动机。提出一种集成式I-EHB液压力分段比例一积分PI控制方法,利用基于系统改进的田口方法求出分段PI控制器的最优控制参数。所设计的鲁棒性液压力控制方法鲁棒性强,响应迅速,在500次试验内均保持稳健。
为了在执行机构全工作范围内取得良好的液压控制效果, 采用基于增益调度的PI控制算法进行液压力控制。以指令液压为调度变量,液压控制器在不同的局部控制器之间切换,局部控制器采用PI控制。
反馈控制按实际值和目标值的偏差进行调节,而不需要考虑干扰类型。但是反馈控制存在信号传递周期长、实时性差的缺点。引入前馈和反馈控制的方法。前馈控制是基于不变性原理发展起来的一种特殊控制规律,能够按扰动进行调节,控制实时性强,但只能克服特定干扰,所以经常与反馈控制一起使用。基于其开发的电子伺服制动系统ESB采用前馈和反馈控制算法对主缸液压力进行控制,能够实现高精度的制动压力控制,保持车辆实际减速度跟踪恒定。将该系统应用于坡道停转、自适应巡航和坡道起步等工况,试验结果表明该系统的实时性更强,操纵性能得到明显改善。
基于试验分析了集成式电子液压制动系统I-EHB的开环特性,发现系统增减压时,主缸液压力产生明显的爬行现象,影响了系统的响应速度和精度,并指出是由于减速机构存在较大的摩擦力引起的。当采用PID控制器对系统进行闭环控制时,发现在跟踪目标液压力的同时在目标值上下不断振荡,有可能会使系统失稳,而且跟踪误差较大。因此提出了利用颤振信号进行摩擦补偿。摩擦爬行现象消失,系统的线性度提高。
将切换函数转换成饱和函数来最大限度地削弱系统抖振,使控制器发挥最佳性能,并增强在多种工况下的适应性。LSP的IBS采用基于液压模型预测的方法对目标主缸活塞推杆位移进行修正,结果表明相比于传统EHB系统,IBS的液压波动明显减小,有利于提高制动舒适性。
目前应用到基于双控制变量的控制系统主要有两种控制算法:切换控制和串级控制。切换控制是一种多个控制器并联,但同一时刻只有一个控制器在工作,在控制部分要有逻辑开关实现不同控制器的平滑切换。
设计了主缸活塞推杆位移一主缸液压力切换控制器,并提出在保证系统稳定的基础上控制器设计的关键点在于两种控制器的切换时机。
串级控制是一种串联控制形式,能够增强系统的鲁棒性,但首先要考虑所设计的控制系统的稳定性。其次,由于两种控制器的各方面性能有所不同,需要协调一致,因此内外环控制器不能独立设计,需要根据控制器的性能要求同时设计内外环控制器的参数。设计了内环是位移环、外环是液压环的串级控制器,并进行了控制系统稳定性的分析。
采用抗回绕控制器,能够保证系统平衡点全局渐近稳定。
针对液压驱动单元为「液压泵+高压蓄能器」形式的EHB系统进行主缸液压力控制,
大多数采用反馈控制方法.
受高压蓄能器重量、体积、安全性等因素影响, 所述的EHB系统取消了高压蓄能器,由电动机带动柱塞泵直接提供高压油。
通过将目标液压和实际液压的差值输入PID控制器调节电动机的转速,实现主缸液压力跟踪控制。
3. 轮缸液压力控制
轮缸液压力控制的工作原理是接收由上层算法(制动防抱死控制算法、车辆稳定性控制算法、电液复合制动分配算法等)计算得到的轮缸目标压力,根据当前车轮所处的实际工作位置,结合电磁阀的工作特性以及包含制动管路和制动轮缸在内的EHB系统的压力特性,得到电磁阀的实际控制指令。同时不断监测当前轮缸实际压力和目标压力,以便及时调整电磁阀的控制指令和工作状态,使轮缸实际压力尽快地达到目标压力。不涉及传统EHB系统中电动机液压泵的控制问题。
提出基于轮速反馈的液压力控制方法,能够补偿车辆制动力输出和车辆载荷扰动的变化量。
基于法规对制动系统的双回路要求,设计了两种液压驱动单元的控制回路,并对比了单回路控制和双回路控制的控制方法,试验结果表明双回路控制的控制效果更好。大多数是采用基于双回路控制方法的轮缸液压力控制。
国内外多是以轮缸液压力为控制变量设计控制系统。下表所示是以轮缸液压力为控制变量的轮缸液压力控制方案。
电子液压制动系统轮缸液压力控制方案
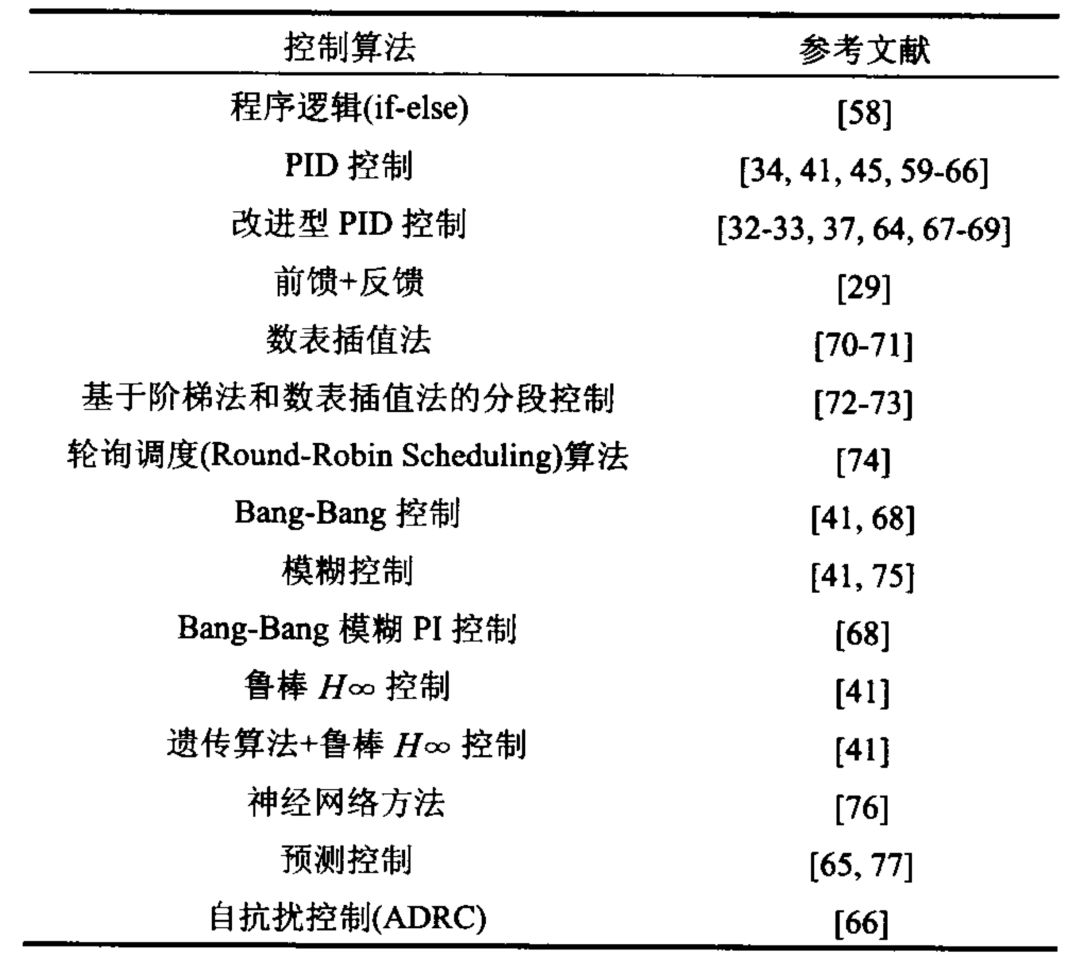
程序逻辑(if-else)控制器可根据轮缸压力传感器的反馈信号获得轮缸的实际压力,与目标压力相比较,通过分别控制前后轮缸的进液阀和回液阀的开闭来对轮缸压力进行调节。该控制系统相比于传统制动系统的性能更好。
由于采用程序逻辑(if-else)使得轮缸实际压力有较大波动,所以改用普遍使用、可靠性高的PID控制算法来设计轮缸压力控制器。一般将轮缸目标制动压力与轮缸实际制动压力的差值作为PID控制器的输入,通过试验调节控制器的控制参数,输出为增减压电磁阀的占空比控制信号,使轮缸实际压力跟随目标压力。
由于汽车制动系统是一个复杂的非线性系统,采用传统PID控制算法进行轮缸压力控制时,系统响应及稳定性等并不理想,不能满足制动系统的要求。基于大量工程实践衍生出许多改进型PID控制方法,对控制系统的控制效果有较大改善。如进行控制器设计时,通过分段PID控制算法调节占空比来控制EHB系统中的高速开关阀,从而实现轮缸压力的跟随。由于用于对比例阀进行调节的PWM占空比和线圈电流近似呈线性关系, 提出基于查表前馈的增量式PID控制算法,实现了对溢流阀线圈电流的精确控制,从而间接地调节轮缸压力。由于EHB系统单片机性能的限制,采用递归PI控制方法控制轮缸液压力,累积上一步输出的电磁阀控制信号。
以上所涉及的PID控制器皆为定参数,仅能够在一定工况下或某些工作点处实现较好的控制效果。但其固定的控制参数对复杂路面和工况的适应性不高,所以设计了能够在线调节参数的PID控制器,能够改善控制效果。
由于EHB系统具有较强的非线性特性,采用模糊PID控制算法实现了EHB系统的轮缸液压力控制,与传统PID控制算法相比,模糊PID控制算法能够准确地实现轮缸液压力控制,但是建立压力的快速性不如传统PID控制算法。因此采用分段模糊PI控制算法对轮缸液压力进行控制。仅当实际压力与目标压力偏差较小时,采用模糊PI控制算法来实现制动压力的精确调节;偏差较大时仍采用传统PI控制算法。
对于不同压力区间PI控制器的最优参数选取也不同,将EHB系统的工作区间分为低、中、高压,通过模糊逻辑求出最优PI参数。然而模糊控制算法存在不连续性,会带来控制信号的不连续等问题,从而影响控制系统的性能。因此增加自整定方法来调整控制器的控制参数,但必须考虑控制参数的收敛性。利用模糊PI自整定算法对轮缸压力进行控制。结果表明,模糊PI自整定算法在EHB系统的整个工作区间都具有良好的控制效果。
为了弥补反馈控制的不足,引入基于查表法的前馈控制算法采用前馈+反馈控制的算法,提高了轮缸液压力控制系统的响应速度。
除了采用PID控制算法设计轮缸液压力控制器外,还提供了另外一种思路:即采用数表插值法来进行轮缸液压力控制,对数表插值法进行了改进。首先分析了轮缸制动间隙对压力调节的影响,发现制动问隙使得制动初始阶段制动力的上升过程存在迟滞现象,且轮缸压力变化的非线性化趋势明显。然后提出一种分段控制的方法,即将目标压力大于1.2MPa 的区间采用数表插值法计算占空比,而小于1.2MPa的区间采用阶梯法来计算占空比。试验结果表明,考虑了迟滞特性的分段阶梯查表法比采用单一数表法进行轮缸压力调节的控制精度有所提高。
轮询调度算法作为一个经典的调度算法由于其实现相对简单,调度公平性比较好在计算机系统、网络等方面有着广泛应用。其工作原理如下:算法将控制器的处理时间分为时间片,分配给每一个进程。当被算法选中的进程进行完所分配的时间片后,无论该进程是否已经完成所要求的任务,算法都会暂时停止该进程,同时调度当前队列中的下一个进程。而被算法暂时停止的进程会被排到队列的末尾,等待下一次调度的执行。这样就可以保证队列中的所有进程在一个给定的时间段内均能得到执行,但会导致对优先级高的进程响应不及时的问题。采用轮询调度算法调节轮缸液压力。试验结果证明系统的响应时间和控制精度对于车辆应用的可行性,但是还有进一步优化的空间。
Bang-Bang控制是一种非线性极值控制,其控制器的输出只有最大和最小这两种极限状态。针对EHB系统的强非线性设计了Bang-Bang控制器来控制轮缸压力。发现当存在系统内部参数摄动和外界随机干扰的情况下,Bang-Bang 控制系统的振荡比较厉害,稳定性较差。认为EHB系统实现对制动压力的控制关键在于确定合适的PWM占空比。为了快速使实际压力趋近于目标压力,当实际压力与目标压力偏差较大时,采用Bang-Bang控制来调节占空比。
模糊控制算法可用来对轮缸压力进行控制。实车测试表明,对于 25km/h以内的速度信号跟踪,实际车速变化量在2.5 km/h上下波动,即车内乘员感受不到这一微小变化。但指出模糊控制系统在模型参数变化和外界随机干扰的适应性不是很好,表现为系统响应超调量大,在保压过程中出现大幅度的振荡。
通过试验发现若采用单一的Bang-Bang控制对EHB制动压力进行跟踪控制,轮缸的制动压力会很快达到目标值,但制动压力会在目标压力附近反复波动,稳态误差较大:若采用模糊PI控制对EHB制动压力进行跟踪控制,轮缸制动压力的响应曲线在超调量和稳定性等方面都有较好的结果,但模糊PI的调节时间较长。为了使轮缸制动压力能够快速逼近目标压力,同时还能使实际压力精确地跟踪目标压力,设计了基于 Bang-Bang模糊PI控制算法的轮缸压力控制器,能够明显改善系统性能。
采用鲁棒 H∞ 控制算法设计了轮缸液压力控制器,来提高系统的鲁棒性,结果表明控制系统响应迅速、稳态误差较小,但是超调量较大、波动较剧烈。因此需要优化鲁棒控制器的设计,提高系统性能,减少超调量。遗传算法是一种根据自然法则淘汰适应度差的解最后得到最优解的方法。采用遗传算法对鲁棒控制器的权函数进行优化。优化后系统的超调量减少了约50%,超调后能迅速回到平衡状态,避免了波动和振荡,而稳态误差和响应时间几乎没有变化。当控制系统在模型参数变化和外界随机干扰的情况下,系统的超调量保持在较小值,整个过程比较平稳。但是系统不确定性的存在,按照理想模型计算出的最优解在实际工程中往往不能保持最优,有时甚至会引起控制品质的严重下降。所以,工程中的控制系统不仅要「最优」,还必须具有在不确定性影响下保持「最优」的能力,即鲁棒性和鲁棒稳定性。
鉴于EHB系统存在强非线性的特点,采用神经网络方法设计轮缸液压力控制器,并提高控制系统的适应性。使用试验获得的数据样本集对BP神经网络进行训练,以目标增压速率、轮缸压力、阀前后压差为输入通过离线训练完成的线性阀神经网络模型获得控制电流,再通过反馈修正控制模块确定控制信号的占空比。结果表明,系统各项性能均有显著提高。
通过系统辨识获得了EHB系统的预测模型,在广义预测控制理论的基础上设计了轮缸压力控制器。结果表明,在系统参数时变的情况下应用该算法是有效的,并且该控制算法较一般的PID控制算法进一步提高了汽车的制动性能。在采用最小二乘法对模型参数进行辨识的基础上,借鉴了多模型预测控制思想进行轮缸压力控制器的设计,并指出模型参数变化对多模型控制器性能的影响不大。
自抗扰控制ADRC是一种不依赖系统模型的控制技术。它继承了PID算法中基于误差消除误差的思路。不同之处在于,它能够实时估计并实时补偿系统运行时受到的包括内扰和外扰等各种干扰作用的总和,基于误差反馈的非线性组合能够实现理想的控制性能。将自抗扰控制技术应用于EHB系统的轮缸液压力控制,完成了自抗扰控制器设计和参数调整。实车试验结果表明该系统能够取得理想的控制效果。
液压力控制算法的优劣成为EHB系统能否实现精确快速液压力调节的关键,也是能否与整车良好匹配的关键。
4. 电磁阀特性分析与控制
4.1开关阀
开关阀是通过主动控制电磁线圈产生的电磁力来开关阀口,其开关动作可以根据高低电平的互相转换来实现。基于阀口开闭动作对EHB系统的开关阀进行控制,发现汽车低速行驶时能够满足驾驶需求。在对电磁阀的性能试验研究的基础上对在线控制的车身电子稳定系统ESP的液压模型和反模型进行了研究,由ESP上层车身姿态控制器优化得到的预期压力和当前轮缸实际压力根据系统反模型求出各开关阀的开关指令。在研究原有ABS结构的基础上提出了一种新型可控主动EHB,利用电磁阀的开关控制实现了制动防抱死控制功能。
发现在对ABS和EHB的液压力控制中使用开关控制存在很大缺陷,制动压力波动与滑移率波动相互影响。制动压力波动影响舒适性和轮胎磨损等问题;滑移率波动影响制动安全性和稳定性。分析指出波动是由于电磁阀只有开、关两种状态,实现流量的连续控制难度很大。
从阀芯的机械运动机理、电磁阀驱动电流变化和线圈磁通的关系等角度提出了电磁阀驱动电流的确定方法,能够更精确地控制电磁阀的开关动作。
4.2 高速开关阀
通过控制高速开关阀的开启频率或开启时问可以近似调节通过阀的流量,即采用不同宽度的脉冲信号来控制阀的开关,可以使通过阀的平均流量Q_AVG与占空比成正比 。设Qmax 为阀全开时的流量,则阀的平均流量为:

通过电磁阀的流量与脉冲宽度成正比,与调制周期成反比。因此存在两种方式调节流量,一种是脉宽调制(PWM),调节脉冲宽度;一种是脉频调制(PFM),调节调制周期。由于高速开关阀的临界频率有限,因此PWM方式更适合高速开关阀。在其提出的EHB上基于PWM方式控制高速开关阀,在基本制动工况、防抱死制动工况中进行试验,结果表明能够主动控制轮缸压力。
近年来优化了PWM控制方法。提出一种电磁阀控制方法,通过测量电磁线圈中的感应电流,确定阀芯的当前位置,与期望的阀芯位置进行对比,根据偏差确定PWM方式的占空比。基于偏离度的概念采用PWM控制方法研究制动压力增长速率对ABS控制效果的影响。通过制动试验台分析,使偏离度最小化的占空比能使制动压力增长速率达到最优。结果表明该方法显著提高了ABS控制效果。
PWM脉冲的频率和宽度的选择对轮缸压力的调节效果有重要影响。调制频率一般在 10~100Hz。调整PWM控制的占空比,使阀芯的平均开度保持在设定值,从而控制轮缸压力。在10~100Hz这一低频范围内的PWM控制,通过高速开关阀的完全开和关,实现增压.保压的不断循环,从而减慢制动压力的增长速度,防止车轮迅速抱死 。介绍了PWM控制参数中占空比的选择和频率的选择对ESC液压回路整体压力建立的影响。利用硬件在环测试台对ABS系统电磁阀的不同周期和占空比下的轮缸压力平均增长速率进行了研究。结果发现低频范围内PWM控制的缺点有:
压力变化不是线性的,精确控制需要积累大量试验数据;
由于电磁阀是完全开闭,这就导致噪声和液压力波动的问题。
通过有效调节控制脉冲的频率和宽度,高速开关阀能够近似线性地控制流量瞵引。利用实际主缸压力、实际轮缸压力和目标轮缸压力这三个压力之间的关系计算线圈中的初始电流和电流变化量,实现利用高频信号控制电磁阀。
高速开关阀的响应速度越快,对流量的控制就越精细和平稳。对高速开关阀的控制机理进行详细分析,得出结论:在确定高速开关阀PWM的控制参数时,应当综合考虑控制信号的频率、占空比与高速开关阀的响应速度以及线性工作区间之间的关系。控制信号频率越低,对于具有确定开、闭响应时间的高速开关阀,其占空比工作范围越宽,但控制效果越差。
但采用PWM控制电磁阀时,发现利用占空比对轮缸压力变化速率进行调节的有效区间很小,所以需要采用其他电液比例控制方法。采用PWM控制进油阀、开关控制出油阀的方式对轿车稳定性控制系统的轮缸压力进行控制。发现对于减压阀PWM控制时不同占空比下得到的减压梯度过于接近,很难实现减压精确调节。为了获得理想的减压速率,对减压阀采用PFM方法进行控制,结果表明减压速率随频率变化明显,通过PFM方式能够有效控制减压速率。
4.3 线性阀
采用线性阀能够独立平滑地控制四个轮缸的液压力,并实现基本制动功能和ABS、ESC、TCS 等功能,以及最大程度地回收制动能量。提出了新型的EHB 架构,其ESC采用4个比例伺服阀,实现了更快、更精确的液压力控制,并缩小制动距离。指出,由于用于对比例阀进行调节的 PWM 占空比和线圈电流近似呈线性关系,故采用控制算法实现了对溢流阀线圈电流的精确控制,从而间接地调节轮缸压力。
线性阀的结构比开关阀更为精密,调节压力变化速率时能够控制阀芯悬停在一定位置,所以线性阀的控制方式与开关阀有本质区别。由于电磁线圈通电后温度上升,线圈电阻会发生改变,因此线圈电流和PWM控制占空比的关系发生变化,造成阀芯的悬停位置发生变化。为精确控制轮缸压力,使阀芯位置能够悬停在原位置,在控制线圈电流的过程中,需要考虑温度对线圈电阻的影响。指出线性阀的控制主要分为两部分:控制电流生成模块和反馈修正控制模块。控制电流生成模块是根据当前轮缸压力、目标压力变化率和阀口两端压差通过一定的控制算法得到线性阀的控制电流。反馈修正控制模块是根据目标控制电流、阀口两端的电源电压和当前线圈电阻值得到线性阀的PWM 控制占空比。
(3)耦合/解耦
线控制动系统可实现制动踏板与制动轮缸的解耦。
(4)踏板模拟
需要采用特定装置来模拟制动踏板感觉,保证给驾驶员传递制动反馈信息。踏板模拟器作为关键部件之一,需要更真实地模拟传统制动踏板特性,因为驾驶员在长期的制动操作中,已形成使用这种带真空助力形式的制动踏板的习惯。传统的制动系统中,驾驶员在踩踏制动时,能够感受到真空助力器以及液压系统的反馈, 整车在不同制动压力的驱动下,建立起相应的减速度,给驾驶员建立起制动踏板感。踏板踩踏速度、踏板力、踏板行程以及对应压力和减速度的建立都影响制动踏板感觉。传统的制动踏板感觉是基于制动样件选型来调整, 每个企业也都有基于样件的踏板感觉DNA。目前制动踏板感觉评价, 主要是通过主观评价评分和客观数据测试两种方式。
国内外厂商和科研机构对线控制动系统踏板模拟器进行了大量的分析研究,提出了多种类型的踏板模拟器设计思路,根据踏板力模拟方式可分为主动式和被动式。 主动式踏板模拟器可以对踏板行程−踏板力特性进行实时调整,一般设计有独立的信号反馈、控制系统及执行机构,结构复杂,多处于研究阶段。设计的电子辅助制动系统进行了主动式踏板力补偿分析,对踏板感觉进行了优化;提出了一种踏板感觉可控的踏板模拟器,并通过实例仿真分析了踏板特性的影响参数;设计了利用高压蓄能器和气体弹簧共同调节模拟器内压力的制动踏板感觉模拟器。提出了一种基于磁流变液可控流变特性阻尼可调的制动踏板感觉模拟器。被动式踏板模拟器踏板行程−踏板力特性多通过特殊的机械结构实现,一般不能实时调整和补偿,结构简单易于实现。常见的形式有采用弹簧和橡胶体组合模拟传统非线性踏板感觉,采用两段或多段弹簧组合用分段线性模拟非线性踏板感觉,以及采用节流机构利用非线性液阻模拟非线性踏板感觉等。
踏板模拟器系统中各部件参数均可对踏板感觉即踏板行程−踏板力特性产生影响。分析了制动主缸活塞摩擦特性对制动踏板感觉的影响;在制动踏板感觉试验研究中,提出了影响制动踏板感觉的因素;设计了一种组合弹簧式踏板感觉模拟器,仿真分析了活塞阻尼系数、推杆回位弹簧预紧力、电磁阀最大通流面积和助力比等参数对踏板力−行程曲线的影响。以上研究多通过理论和仿真的方法验证模拟器设计,或是结合仿真与试验进行踏板感觉模拟影响因素分析,并未针对实际产品进行设计改进及验证。特别地,将模拟器常闭电磁阀作为先导控制功能的阀控踏板模拟器研究未见报道。
BBW系统取消了踏板和主缸之间的机械连接,踏板力需要用通过模拟器或算法模拟的方式提供给驾驶员,踏板力模拟的好坏决定了BBW系统品质的优劣。目前主要的研究集中在实验方法,一般是通过对大量的实验数据进行分析归纳,得到踏板力与踏板行程和车辆状态之间的关系,通过弹簧或作动器对踏板力进行模拟。 线控制动踏板感觉从基于样件调整到从零开始设计模拟。完全的设计模拟,可调整范围就相对宽泛,不会受限于样件选型,可以灵活设计调整踏板感觉曲线。一方面可以去模拟传统制动系统的踏板感觉, 另一方面也可以让消费者适应新的踏板感觉。甚至可以将制动踏板和油门踏板集成, 完全通过电子化的设计以及能量回收的配合来建立新的踏板感觉。是否需要沿用传统车的制动踏板感觉标准和开发模式,这是线控制动的全新选择。
线控制动系统踏板感觉模拟器设计与改进
设计开发一种线控制动(EHB)系统样机,选取不同过流孔径的踏板模拟器常闭电磁阀进行踏板行程−踏板力对比试验. 结果表明:当将单个电磁阀直接接入踏板感觉模拟器回路时,随着制动力加载速度的提高,会产生实际制动踏板行程−踏板力关系曲线偏离目标曲线的问题,并且电磁阀孔径越小,偏离越大,借助于数学推导得出电磁阀过流孔径与踏板速度响应之间的理论关系。设计一种液压先导阀加入到踏板模拟器回路中,以提高系统通流能力和踏板速度响应,液压先导阀由原回路中的电磁阀控制。对改进的踏板模拟器回路进行仿真及试验,结果均表明:改进过的回路可较好地实现踏板行程−踏板力曲线精度,曲线受踏板力加载速度变化影响小,同时可使模拟器常闭电磁阀工作功耗更低,提高了系统的可靠性.
自行设计的一种线控制动系统样机进行踏板行程−踏板力特性试验分析,针对因模拟器常闭电磁阀过流孔径偏小而造成的踏板行程− 踏板力曲线随踏板速度偏移的问题,提出一种改进设计方案并通过仿真及试验验证其可行性.
1 制动系统踏板力特性分析
1.1 传统制动系统踏板力特性
传统液压制动系统踏板行程与踏板力的关系曲线如下图所示,图中S为踏板行程,F 为踏板力. a-b 段:主要消除踏板的自由行程,踏板位移较大,踏板压力没有明显增加;b-c 段:真空助力装置起作用,踏板压力随踏板位移增加而变大;c-d 段:真空助力比达到最大值并恒定,踏板压力随踏板位移变化较大. 在实际制动过程中,中小强度制动时,达到最大制动压力所需的踏板位移较大,即特性曲线斜率较小,踏板压力随踏板位移变化均匀,制动稳定舒适;紧急制动时,达到最大制动压力所需的踏板位移较小,即特性曲线斜率较大,踏板压力随踏板位移变化急剧增加,制动响应迅速.
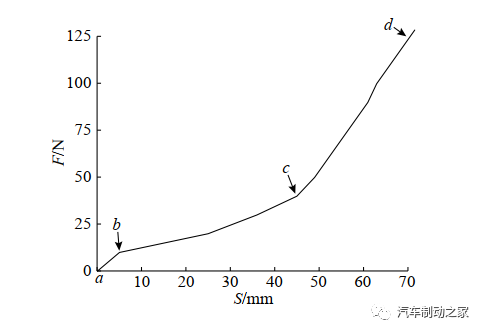
传统液压制动系统踏板行程−力特性曲线
Pedal stroke-force curve of traditional hydraulic brake system
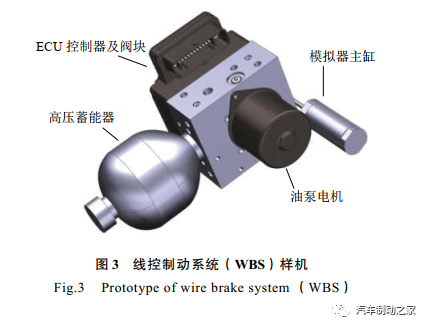
1.2 线控制动系统踏板感觉模拟器设计
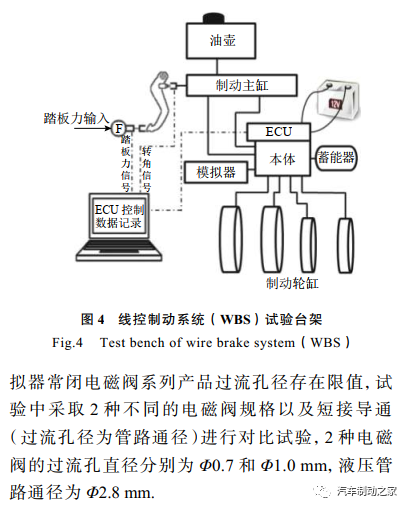
设计开发一种线控制动系统(wire brake system,WBS)踏板感觉模拟器,原理如图 2 所示.

常规制动工况下,驾驶员踩下制动踏板,控制器通过读取踏板角度信号确认车辆制动需求,常开型制动主缸隔离电磁阀上电关闭,模拟器常闭电磁阀上电打开,制动主缸油液通过模拟器常闭电磁阀进入模拟器主缸,并由制动主缸和模拟器主缸共同作用反馈合适的制动脚感. 线控制动系统的制动力源由电动柱塞泵提供,并由高压蓄能器储压,以减少油泵工作次数并提高系统压力速度响应. 控制器通过判断踏板角度传感器等信号,控制电磁阀开度及柱塞泵工作,按照控制逻辑控制线控制动系统输出相应制动力,此时制动踏板和制动力是完全解耦的;如果线控制动系统发生故障,进入备用制动状态,控制器控制制动主缸隔离电磁阀断电打开,模拟器常闭电磁阀断电关闭,模拟器停止工作. 此时制动油液通过制动主缸和制动主缸隔离电磁阀直接进入备用制动回路,提供车辆备用制动力。
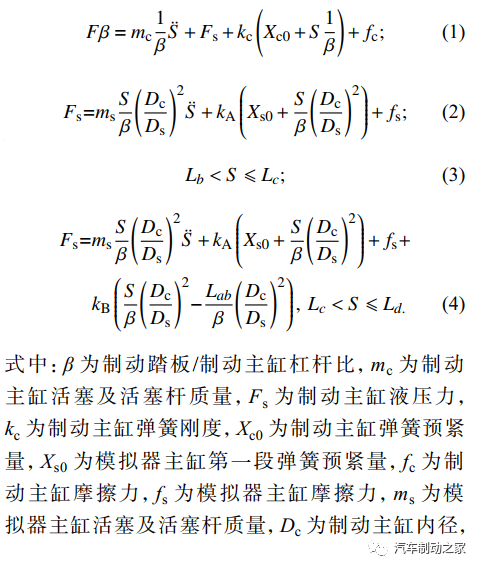
如图 2 所示,在模拟器主缸中设置 2 段弹簧,分别模拟图 1 中 b-c 段和 c-d 段的踏板力特性. 不考虑空行程及制动过程中流体压力损失,制动主缸活塞及模拟器主缸活塞运动方程满足:

2 试验分析与改进设计
2.1 试验条件及主要参数
试验在万向 WBS 试验台架上展开,不考虑油温变化导致的油液黏度变化(室温条件下进行),台架测试原理如图 4 所示.
测试方法:模拟器常闭电磁阀通电,踏板力加载速率 15~25 N/s.
记录数据:记录踏板转角传感器数据、踏板力传感器数据,每组试验记录 3 次.
由于空间布置、功率、发热量等实际要求,模
2.2 试验结果分析
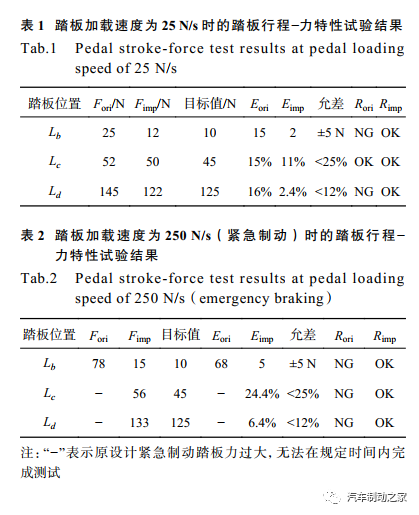
2.2.1 踏板力加载速度为 15 N/s 的试验结果 试验中踏板力加载速度为 15 N/s,试验结果如图 5 所示. 试验中装配过流孔径分别为 Φ0.7、Φ1.0 mm 模拟器常闭电磁阀的样机第一段弹簧曲线均出现了偏移,踏板力偏大;而直接短接开闭电磁阀通路(孔径 Φ2.8 mm)与目标值贴近较好;装配 Φ0.7 mm 孔径开闭电磁阀的样机曲线在第一段出现了明显了非线性特征。
2.2.2 踏板力加载速度为 25 N/s 的试验结果 试验中踏板力加载速度为 15 N/s,试验结果如图 6 所示. 随着踏板加载速度加快:装配过流孔径分别为 Φ0.7、Φ1.0 mm 模拟器常闭电磁阀的样机第一段弹簧曲线偏移和非线性特性愈加明显,并且随着电磁阀过流孔径变小,偏移量和非线性化愈加明显;直接短接开闭电磁阀通路(孔径 Φ2.8 mm)与目标值贴近较好,受踏板力加载速度影响小.
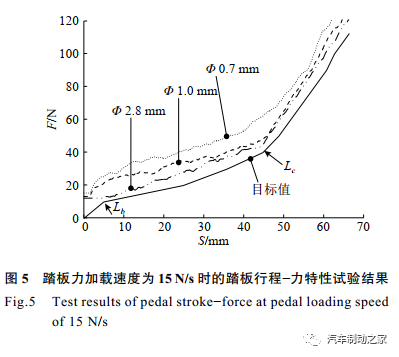
试验结果表明:模拟器常闭电磁阀过流孔径参数对踏板模拟器 S-F 试验结果影响显著,随着制动力加载速度提高,其液压阻尼力变大,踏板感变硬,影响制动舒适性;在紧急制动时,踏板不能及时踩下,导致控制器接收到的制动力请求不足,极大影响行车安全性.
2.2.3 踏板特性影响因素理论分析 由试验分析可知,当前模拟器开闭电磁阀过流孔所产生的液压损失不能忽略,应考虑过流孔径影响,建立如图 7 所示的踏板模拟器简化分析液路图.
考虑管径突变及小孔节流产生的压力损失,根据伯努利定理和流量连续性方程,制动主缸油压 pc 与模拟器主缸油压 ps 的压力损失关系为
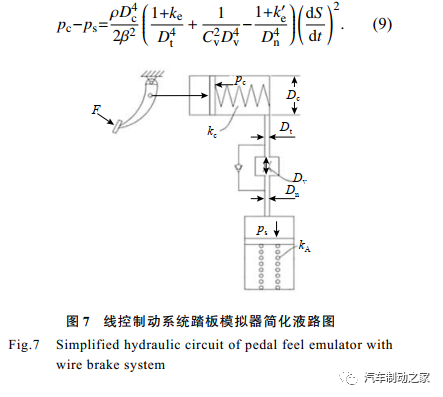
式中:ρ 为制动液密度,Dt 为模拟器常闭电磁阀前管路内径,Cv 为模拟器常闭电磁阀流量系数,Dv 为模拟器常闭电磁阀阻尼孔直径,Dn 为模拟器常闭电磁阀后管路内径,ke 为 Dt 负相关系数,ke'为Dn 负相关系数.

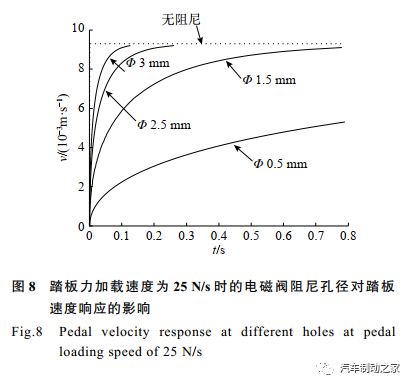
将当前设计参数代入式(4),并根据试验结果确定常量 C 的取值,用作图法可得到电磁阀阻尼孔径对踏板速度响应的影响曲线,如图 8 所示. 为提高踏板感模拟曲线精度,应提高实际系统到达理论无阻尼踏板速度的响应时间. 从图中可以看出,模拟器电磁阀阻尼孔径对速度响应具有高阶影响系数,增大电磁阀的阻尼孔径,即提高其过流面积,能显著提高踏板速度响应.
2.3 改进设计及仿真分析
2.3.1 改进方案设计
重新开发的满足要求的大过流孔径电磁阀理论上可消除上述试验问题. 但考虑到电磁阀产品开发周期较长,性能及可靠性短期内难以完成验证,同时需要与控制器、阀体重新匹配,是一个系统性问题,因此,考虑将当前电磁阀作为先导控制阀使用,充分利用当前开发成果。改进设计方案原理如图9和10所示。
常规制动工况:模拟器常闭电磁阀通电打开,踩下制动踏板后制动油液通过电磁阀进入液控开闭阀控制口,油液首先通过回流排气孔进入模拟器主缸排气并推动模拟器主缸形成初始踏板力,当制动踏板力继续加大足以克服液控开关阀弹簧回复力时,主阀芯阀口打开,制动油液进入模拟器主缸. 松开踏板后,制动油液可通过主阀芯阀口和回流排气孔回制动主缸. 特别地,当踏板力超过一定小行程(足以克服液控开闭阀弹簧回复力打开主阀口)时,可关闭模拟器开闭电磁阀,因出油口压力与液控开关阀控制口连通,仍然能保证主阀口打开,这可在实际中降低模拟器开闭电磁阀通电
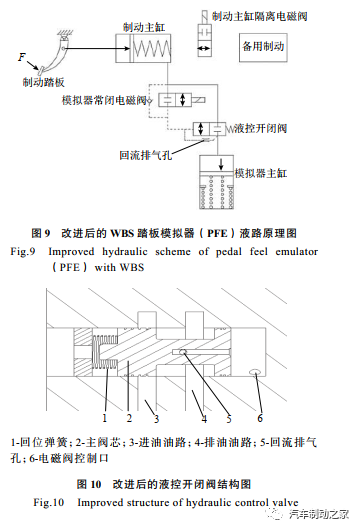
工作时间,有利于控制电磁阀发热量并提高可靠性.
2.3.2仿真分析优化
建立原设计及改进设计仿真模型如图 11 所示. 根据空间布置限制及工程设计经验确定液控开闭阀通径为 Φ10 mm。
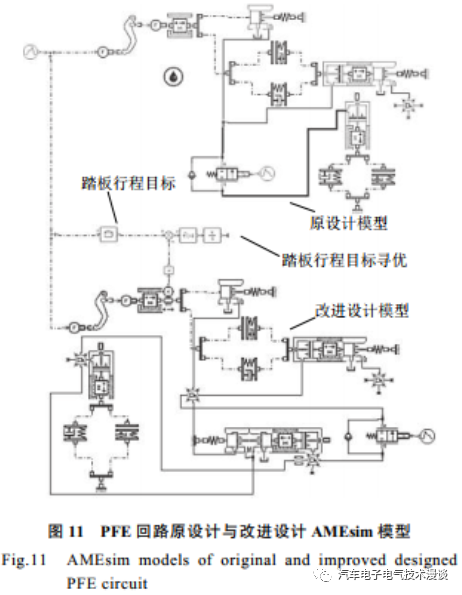
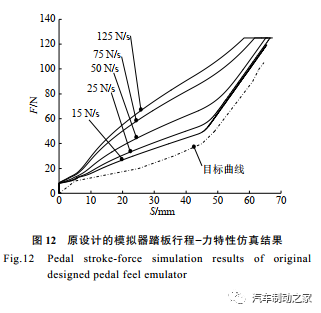
踏板模拟原设计仿真模型踏板行程-踏板力仿真结果如图12所示。模型中模拟器常闭电磁阀过流孔径选定为Φ1.0mm. 仿真结果表明:踏板力加载速度越快,曲线非线性特性越明显,这主要是由于电磁阀过流孔径过小,与之前试验结果趋势相同。如图 13所示为
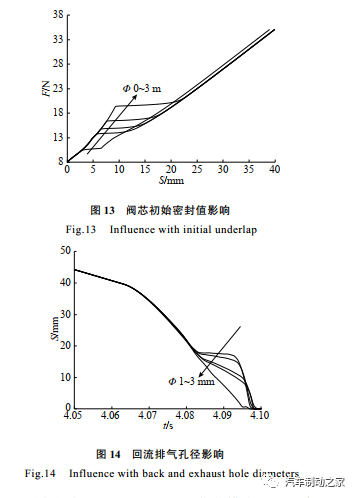
所设计的液控开闭阀主阀口初始密封量对踏板加载 S-F 特性曲线的影响:初始密封量过大会造成初段踏板力变大,并引起 S-F 特性曲线前段突变;如图14所示为回流排气孔径对踏板回程(踏板力为 0)踏板行程的影响:在踏板回程后段,回流排气孔径过小,会造成后段踏板回程不够顺滑,但基本不影响踏板回程速度。
同时利用 AMEsim-Optimus 优化模块对所设计的液控开关阀进行参数寻优,并根据工程实际设定取值范围. 优化后该阀回复弹簧刚度选定为 0.3N/mm,预紧力为 0.3 N,回流排气孔直径为 Φ2.8 mm。
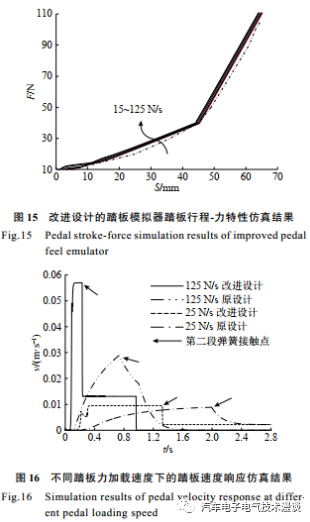
对参数优化后的改进仿真模型施加相同的踏板力,仿真结果曲线如图 15 所示. 仿真结果表明:改进设计仿真结果与目标曲线吻合度良好,受踏板力加载速度影响小,这主要是因为液控开闭阀有较强的通流能力,并可根据踏板力大小调节主阀口开度. 改进设计相比原设计,在不同踏板力加载时间下,踏板速度响应均有明显改善,如图 16 所示. 在踏板改进设计仿真模型中施加如图 17 所示周期性踏板力,sole 表示电磁阀的开闭状态:0 表示断电,1 表示通电. 在 A 段周期内,模拟器常闭电磁阀上电
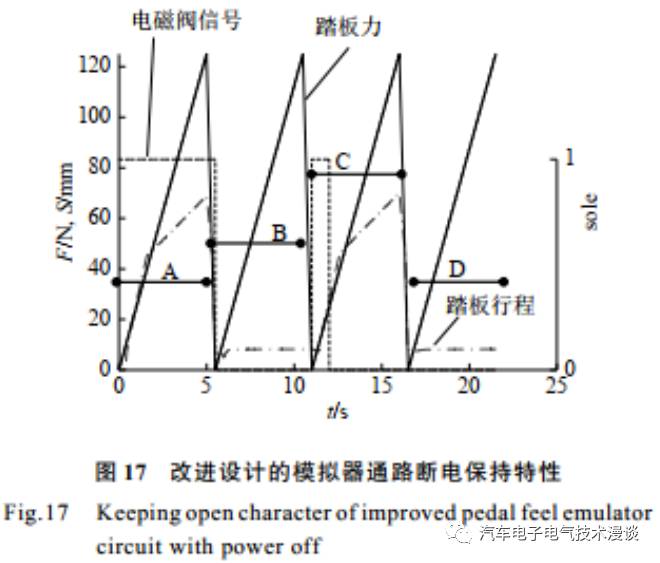
打开,踏板模拟器正常工作;在 B 段周期内,模拟器常闭电磁阀断电关闭,模拟器停止工作,踏板仅输出固定空行程;在 C 段周期内,模拟器常闭电磁阀在前 1 s 内上电打开后关闭,踏板模拟器可依然保持正常工作. 这一特性可缩短开闭电磁阀工作时间,从而降低电磁阀负荷及发热量,提高了系统可靠性.
3 改进方案试验验证
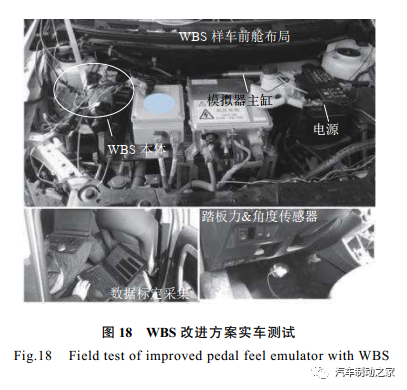
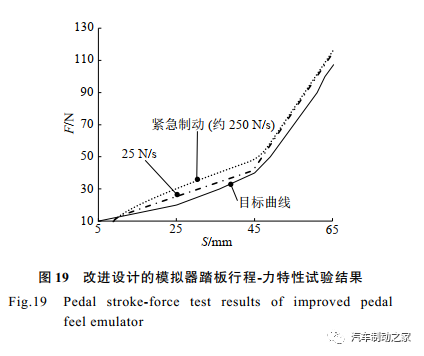
对采用改进方案设计的线控制动系统样机进行实车试验测试,试验情况如图 18、19 所示. 试验结果表明,该优化设计较好地实现了踏板行程− 踏板力特性曲线跟随.
改进前、后的踏板模拟器踏板行程−力特性进行了记录和对比如表 1 和 2 所示. 表中:Fori 为改进前对应踏板位置的踏板力,Fimp 为为改进后对应踏板位置的踏板力,Eori 为改进前对应踏板位置的踏板力误差或误差百分比,Eimp 改进后对应踏板位置的踏板力误差或误差百分比,Rori 为改进前对应踏板位置的踏板力评价结果,Rimp 为改进后对应踏板位置的踏板力评价结果:NG 为不合格,OK 为合格.
(5)主动制动
上层策略根据当前车辆状态和驾驶员操作,向BBW系统发出制动请求,BBW系统则需要准确、快速地响应这个请求。主动制动旨在提高车辆的稳定性和安全性,高级驾驶辅助系统(ADAS)、紧急制动系统 (AEB)及自动驾驶等都使用到了这一功能。目前,所有关于主动制动的研究基本分为基于经验设计的方法和基于动力学模型计算的方法。几乎所有常见的控制算法都可以其中找到应用,如PID算法、最优控制、鲁棒控制、滑模控制、模糊控制、神经网络控制、模型预测控制。
(6)制动能量回收
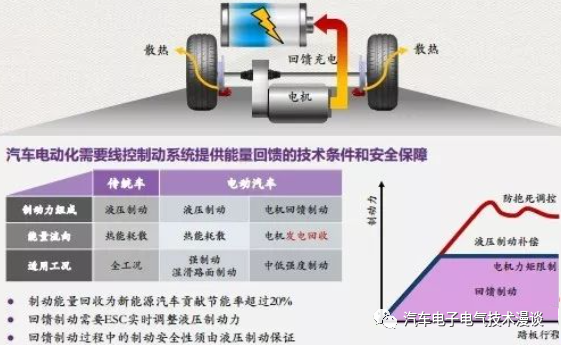
传统燃油车的制动系统由制动踏板、真空助力部件(EVP)和防滑控制部件(ESP、ABS)等组成,没有制动能量回收功能,如果在电动汽车上使用会浪费掉大量的制动能量。线控制动系统(E-Booster)利用线控制动系统控制器和线控制动系统执行器(主要是伺服电机系统)代替了真空助力部件,将有效地解决传统制动系统制动能量无法回收的痛点。
纯电动汽车或混合动力汽车在回馈制动过程中,主缸制动液暂时储存在蓄能器内,此时液压制动不介入,控制器根据踏板行程信号向电机发送相应的制动扭矩请求,实现主缸与轮缸的解耦,利用电机制动实现能量回收。若再生制动力不足以产生驾驶员所期望的制动减速度,低压蓄能器内的液压制动液将被推至制动轮缸内,此时系统工作于机电复合制动模式,并在整个制动过程中传递一致的制动踏板感觉,实现制动力的深度解耦。为了保证回收效率,将对电机制动与机械制动力矩进行解耦,实现机电复合制动的双向协调控制,如下图所示。
制动能量回收控制原理
从功能上看,电动汽车要实现制动能量回收,制动系统须由电动机回馈制动和另一种制动形式共同作用。由于电动机制动的特性以及回收能量最大化的需求,液压制动系统的制动力必须实时可调。
与制动力通过液压制动力及回馈制动力协调控统制动系统相比,线控制动系统取消了真空助力制动,可满足电动汽车及混合动力汽车的再生制动器,具有结构简单、制动响应快、控制精度高等系统需求,具有很好的发展前景。
因此线控制动是必然的发展方向。
制动能量回收系统的协调分配电制动力矩和制动力矩是关键技术之一,控制策略的研究基本围绕这一点展开。
在驾驶员制动时,线控制动系统控制器依据动力总成的工作状态和驾驶员的制动需求控制电机实施电制动,电机制动力不足部分通过液压制动进行补充。 制动过程中踏板行程模拟器会将踏板力和轮缸压力进行解耦,使电机电制动部分的能量得到回收,提升整车的续航能力,还改善了驾驶员制动过程的舒适性。此外,线控制动系统通过其控制器与智能驾驶(ADAS)零件进行交互,可以实现响应智能驾驶部件的制动需求。
(7)制动控制
是自动驾驶执行系统的重要部分,目前ADAS与制动系统高度关联的功能模块包括ESP(车身稳定系统)/AP(自动泊车)/ACC(自适应巡航)/AEB(自动紧急制动)等。电动汽车上与线控制动系统直接关联的零件有整车控制器(VCU)、电机控制器(MCU)、智能驾驶部件(ADAS)和防滑控制部件(ABS、ESC)等。
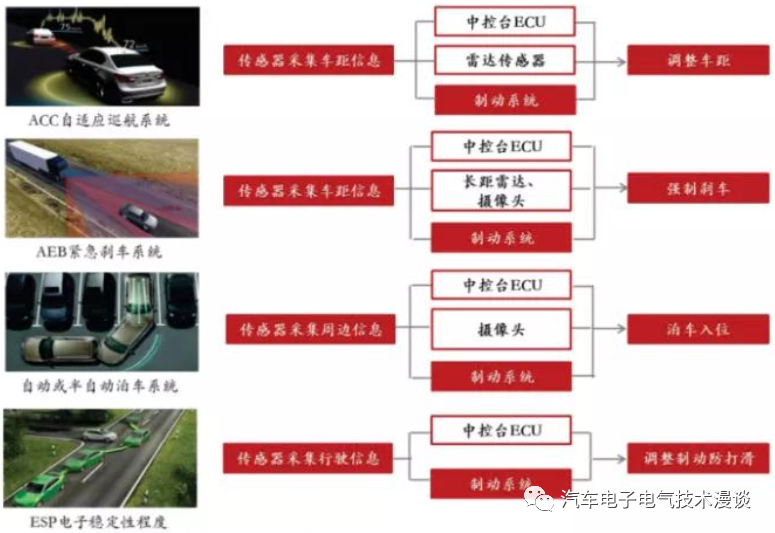
线控制动系统与各个模块的高度关联
(8)线控制动功能安全
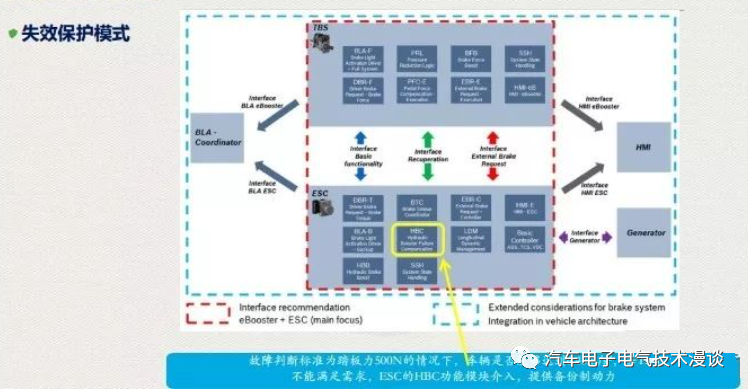

2.3. 安全冗余
是永恒的发展任务,电信号传递更快、更可拓展,但是不如机械连接稳定。制动系统和自动驾驶对线控制动提出了两个层次的冗余要求:
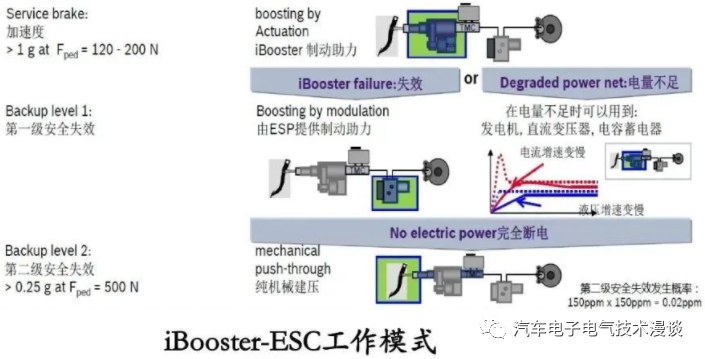
1)制动系统本身必须具备可靠的安全失效模式。在L3+级别自动驾驶尚未放量的当下,线控制动需求来源主要是新能源车型,安全稳定才是刹车系统的第一要务。EHB采用可靠的机械备份,即车载电源失效时启用纯液压助力,这也是EHB容易被市场接受的关键因素。
2)自动驾驶必须具备电子冗余,不能单纯依靠机械冗余,否则要求驾驶员在段时间内接管车辆就会陷入责任划分的泥潭。因此,自动驾驶车型使用线控制动至少需要电子冗余+机械冗余的双安全失效模式才能满足法规要求。ESP并非可靠的安全失效模式,本田CR-V发生过ibooster和ESP同时故障的案例。博世最新一代IPB新增RBU冗余制动单元、伯特利WCBS+双控EPB则是对应L3+级别自动驾驶的电子冗余方案。
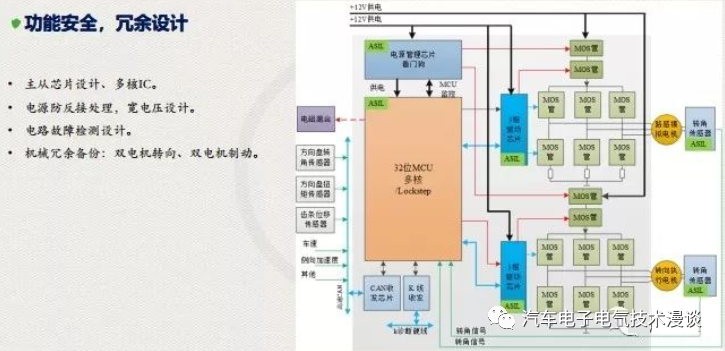
高可靠性实时容错控制系统结构设计
BBW系统的应用一直受到安全可靠性的较大影响, 因为任何一个电子信号的失效都可能会带来一个灾难性的后果, 而且在BBW系统之中, 不再拥有独立的备用制动系统, 这就对其设计的安全性有了更高的要求, 使其必须安全、实用并且是可维护的。虽然可以通过可靠性分析、事件树分析、故障树分析、危险分析等方法提高BBW系统在设计阶段的安全性, 并且通过有效的质量控制手段保证生产质量, 但是还是不能有效的防止某些故障的出现。
因此为了保证系统的安全性, 需要提升系统的容错功能, 最合适的办法就是对系统的元件、单元和子系统, 甚至是软件进行冗余设计, 通过这样的方式能够是实现有效的系统容错结构设计, 提高系统的安全可靠性, 但是同时也会提高系统的成本, 因此设计时实现高安全性、成本、空间和重量等多方面因素的均衡。 (9)车载网络通讯技术 BBW系统是一个安全关键性分布式实时控制系统, 对于安全性和可靠性有着非常高的要求, 因此要求车载网络协议必须要具备高速率、可靠和支持容错等方面的性能, 而且消息的传输时间的实时和确定性也是其必备的条件, 只有这样才能够准确的完成实时性要求很高的控制任务, 诸如严格时序和参数定时刷新等,线控系统对车载通讯网络提出了新的性能需求。针对这样要求, 需要进行嵌入式实时控制系统的网络设计。嵌入式实时控制系统存在两种模式, 分别是事件触发和实践触发, 目前基于事件触发的总线系统将会不能满足新的需求,尤其是系统对通信的高速率、可靠性、容错支持以及满足消息传输实时和确定性的要求。当前的研究结果表明, 基于时间触发的确定性通信网络协议在安全关键性实时控制方面的应用更具优势。基于时间触发的确定性的通信网络协议是满足安全关键性实时控制的最佳选择。目前有TTCAN,Byteflight,FlexRay,TTP/C 等通信网络标准。在BBW系统中应用最多的是 FlexRay,TTP/C 两个网络协议。TTP/C 是专门为安全关键实时控制系统而设计的通信协议,基于TDMA (Time Division MultipleAccess)的访问方式,能够支持多种容错策略,提供容错的时间同步以及广泛的错误检测机制。FlexRay是专为车内局域网设计的一种具备故障容错的高速车载总线系统,基于时间触发的机制,具有高带宽、容错性好等特点,在实时性、可靠性以及灵活性等方面优势明显。FlexRay有两个信道, 最高速率都可以达到10Mbps,能更好的实现冗余,使得消息具有容错能力。 Flex Ray协议具备同步时基、确定性、容错等特性。 目前看,车载通信网络技术的应用商业化还在雏形,CAN通信仍占主导。但是随着智能汽车的发展,车载通讯网络的变革也将很快出现。 (10) 传感器技术 制动系统传感器如踏板力、行程、扭矩、温度、 电机转角位移等传感器, 这些传感器对制动系统的控制执行有着至关重要的作用。传感器不仅包含制动系统传感器,同时还包括整车速度,转速以环境感知传感器。 未来的制动系统一定是智能主动制动系统,能够依据精确、 分辨率高传感器信息来感知、 控制决策、动态执行。因此成本低、可靠性好、精度高、体积小的传感器是发展线控制动系统的关键技术之一。多功能化、智能化、集成化的传感器并和计算机芯片集成是未来发展趋势。 (11)车用电源系统
BBW制动系统对于电源得需求较传统制动系统较高, 需要42V的驱动力才能够满足驱动力要求, 有效的预防紧急制动情况下出现电量不足的问题;而且42V电源通过进行良好绝缘处理, 能够有效的防止出现线路接触不良的问题, 有效的提高控制系统的安全性。
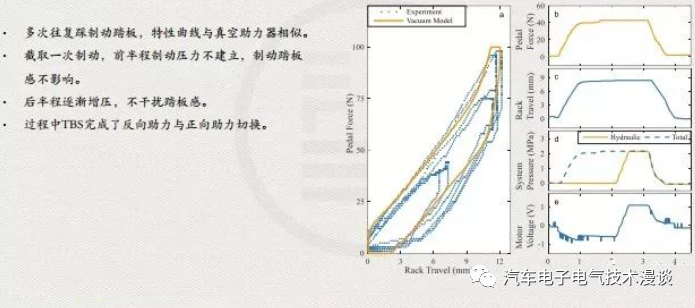
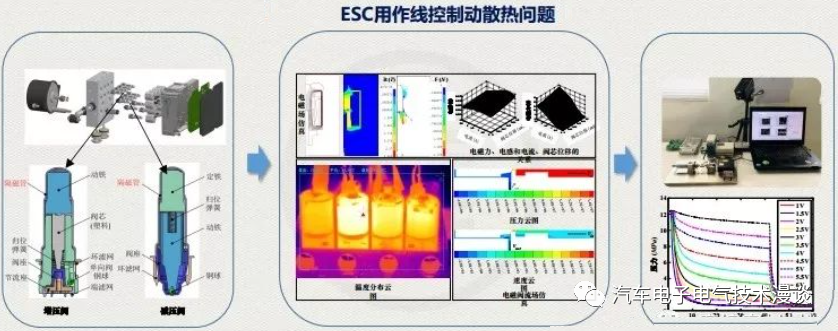
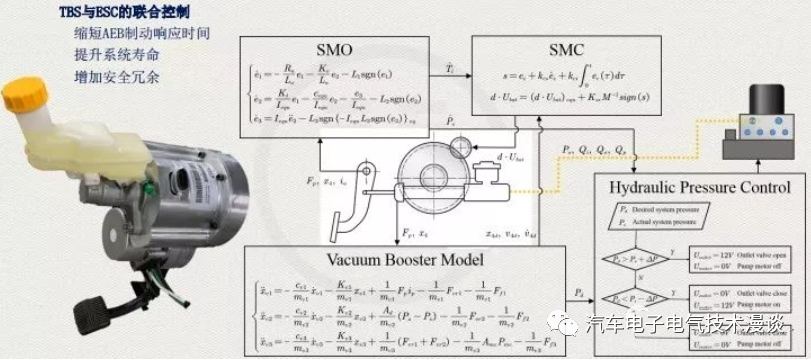
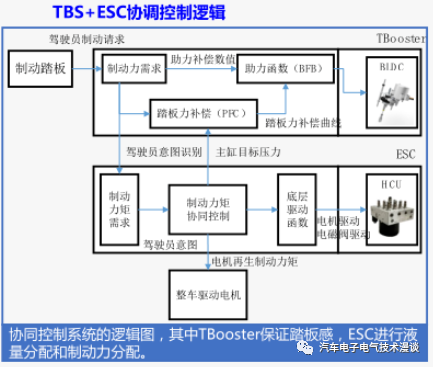
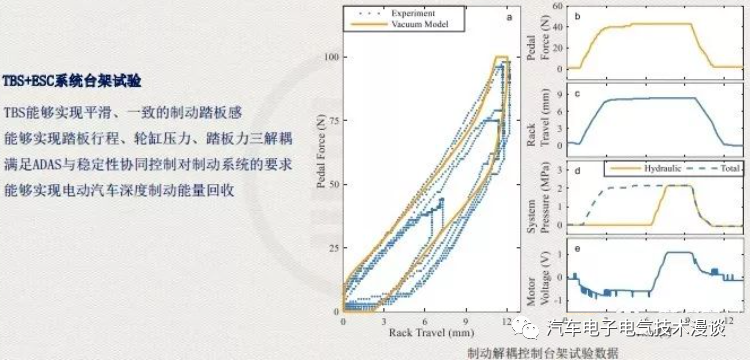
智能汽车线控制动系统开发
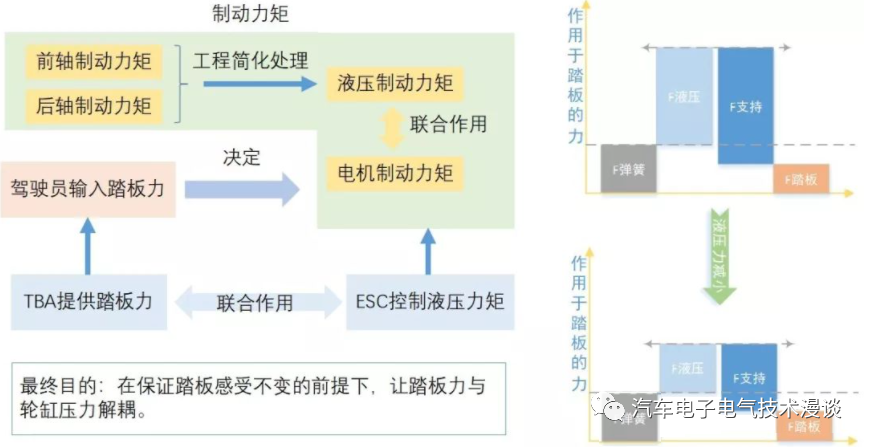
在TBS和ESC协调控制下,TBooster保证踏板感,而ESC将进行液量分配与制动力的分配,同时展示了协同控制系统逻辑图。

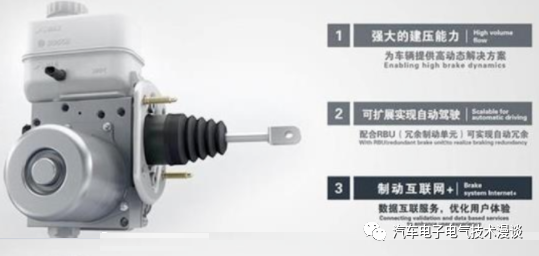
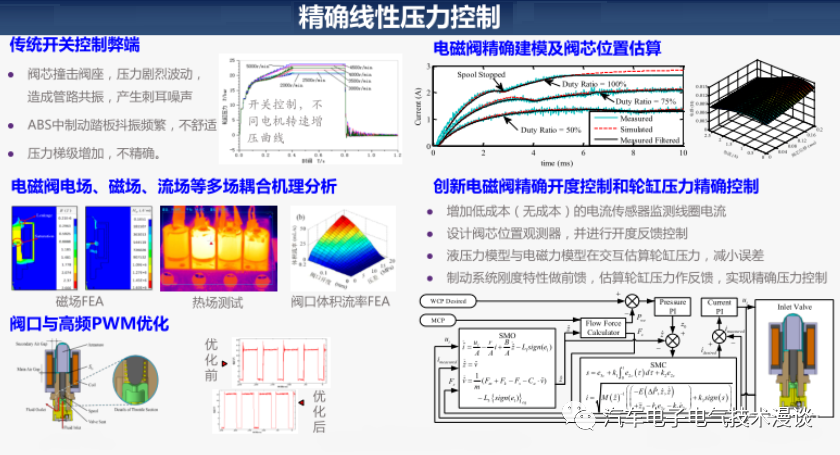
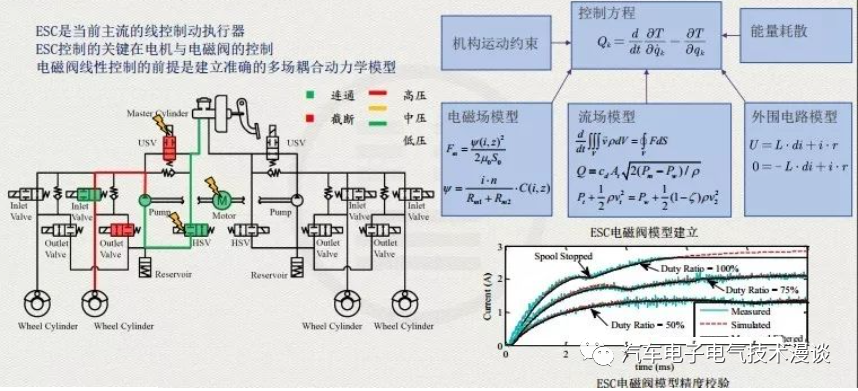
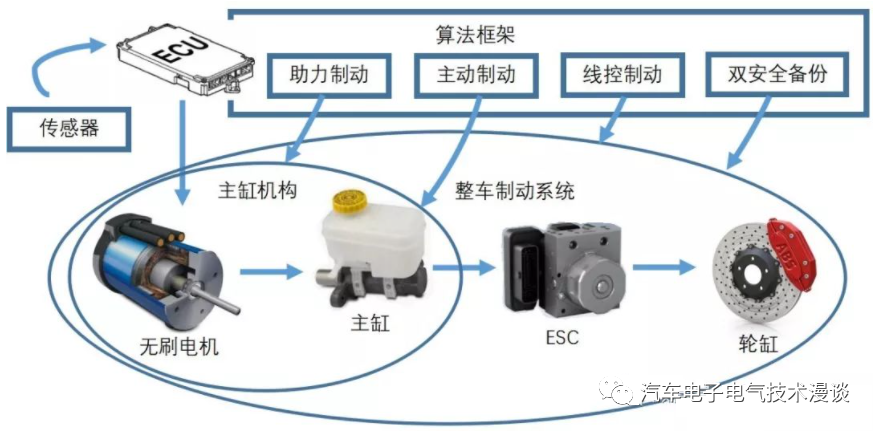
面向下一代智能汽车的线控制动系统解决方案:T-Booster与ESC深度耦合制动系统
-1.T-Booster系统
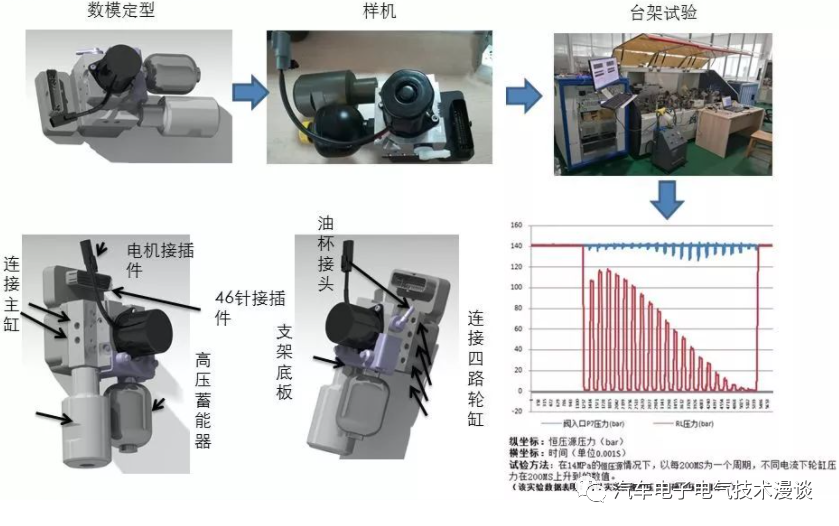
为此研发了一款不依赖于真空源的主被动一体化电动助力制动系统(T-Booster),为新能源汽车、ADAS、自动驾驶技术等提供模块化、可扩展的制动系统解决方案,其外观如下图所示。
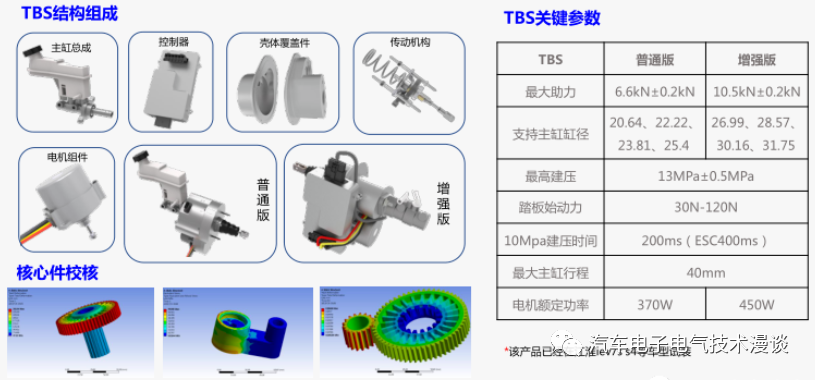

T-Booster三维模型
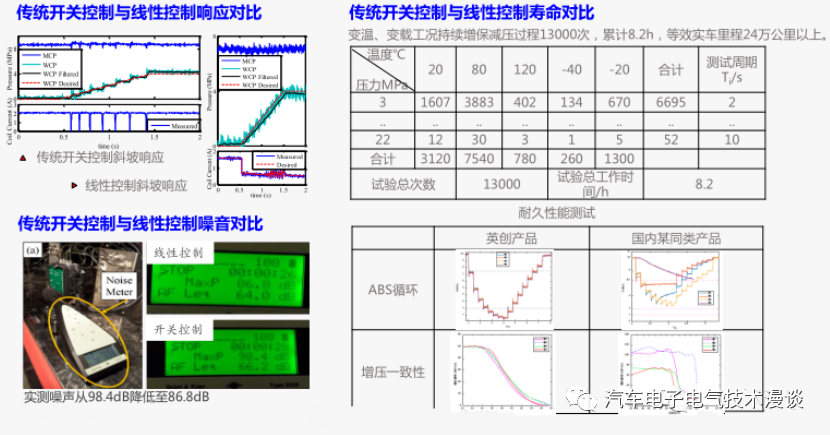
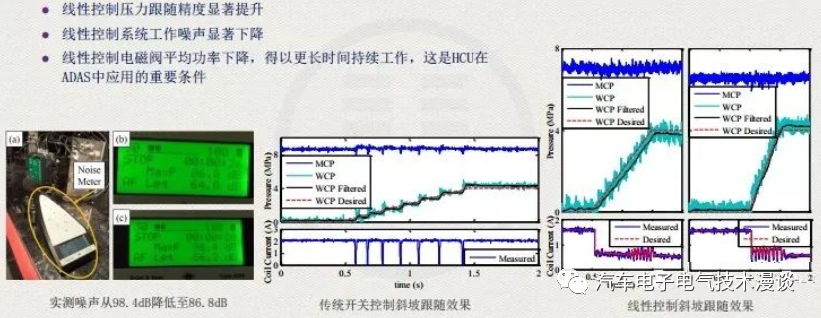
T-Booster利用电机及传动机构代替真空助力器来实现制动助力功能,通过电机来推动制动主缸活塞,可迅速建立所需的制动压力并对其进行精确调节,实现主动制动功能。与典型的ESC系统相比,T-Booster建立制动压力的速度更快,系统工作寿命更长,满足连续下长坡等需要制动系统长时间工作的工况。
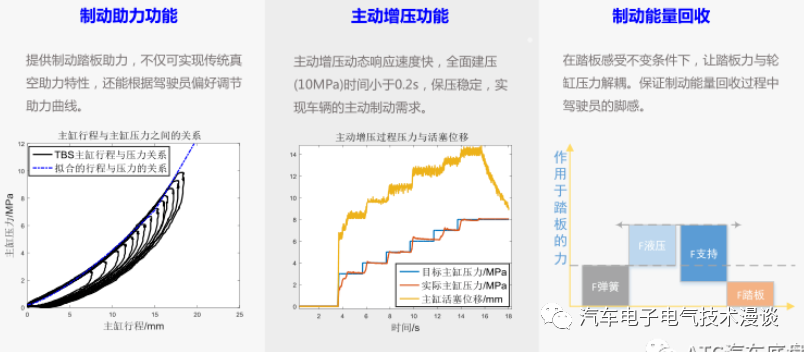
1.1电动助力性能
下图为人工驾驶的紧急制动工况下主缸液压的响应特性及制动推杆的行程曲线,在主缸内建立10MPa压力耗时150ms。
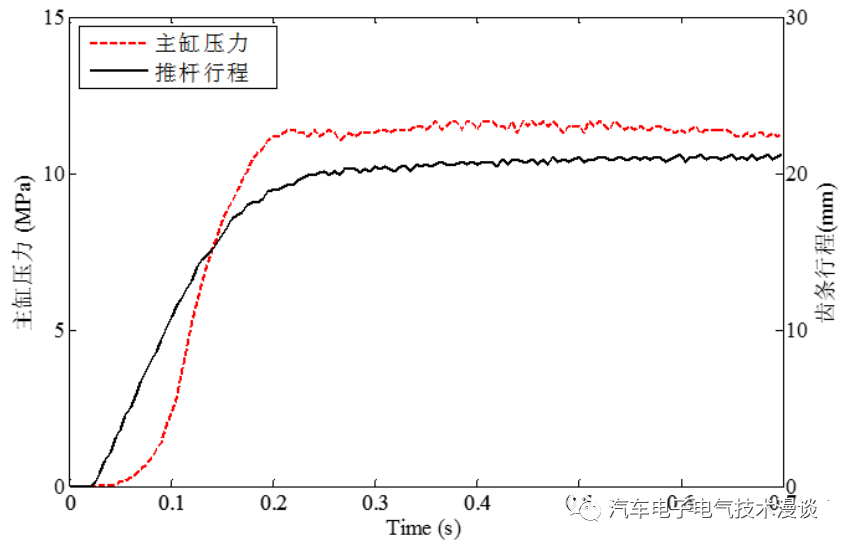
主缸压力-推杆行程曲线
下图为不同助力比对应的主缸压力—踏板力特性,可根据不同车型及驾驶员主观意愿调整助力比,以调整制动踏板脚感。
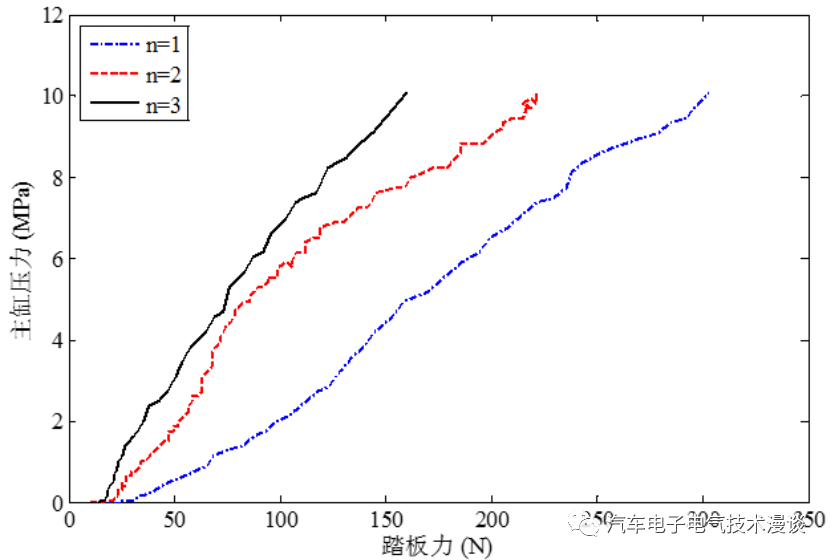
T-Booster助力特性
T-Booster可以通过助力控制提供接近于真空助力制动系统的踏板感觉,下图为与原车真空助力制动系统的对比。
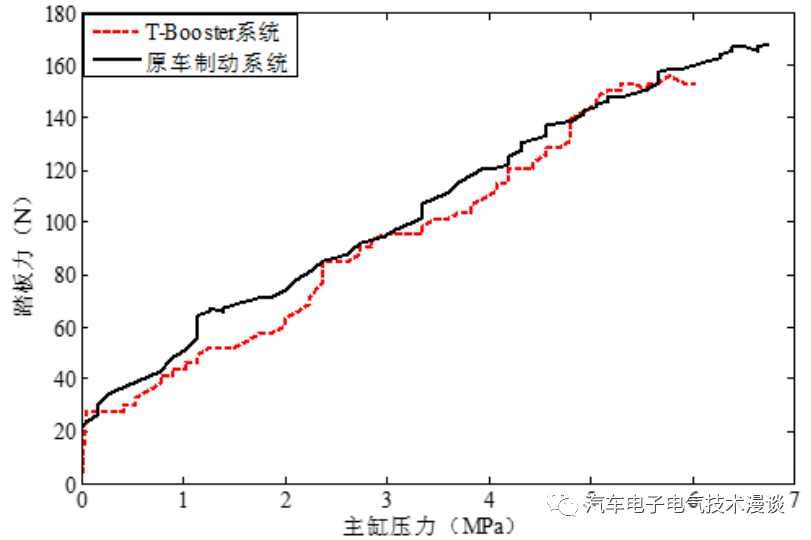
主缸压力-踏板力曲线
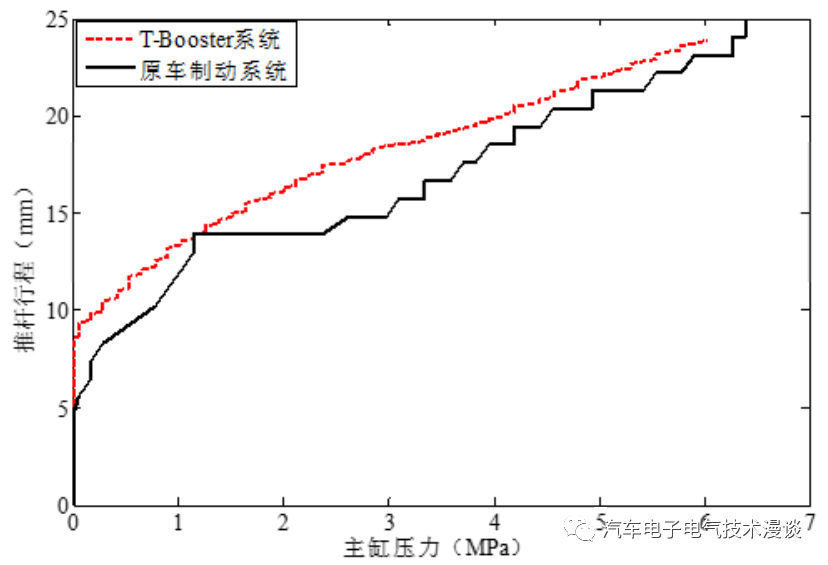
主缸压力-推杆行程曲线
1.2 主动制动性能
T-Booster的瞬态响应特性影响着车辆的制动安全性能,下图为T-Booster主动增压的制动主缸压力响应曲线。主缸压力从0建立至10MPa所需要的时间大约为0.2s,压力稳态跟踪误差小于0.1MPa。
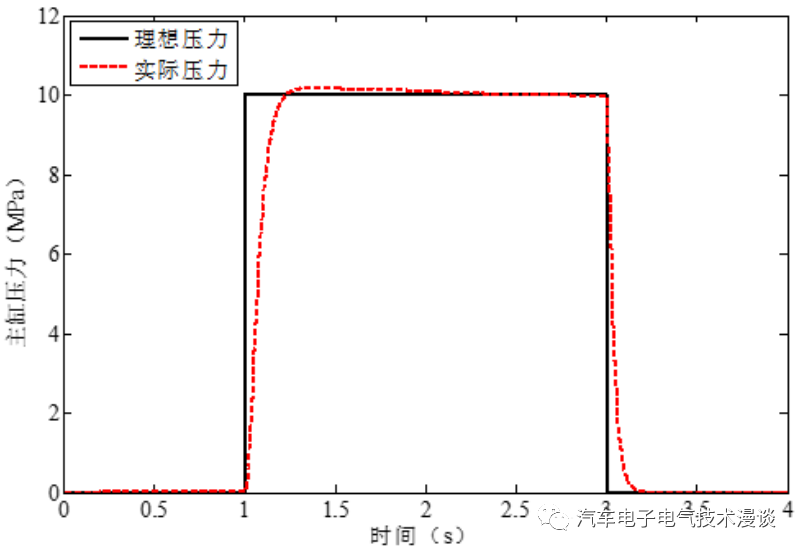
主缸压力阶跃信号响应曲线
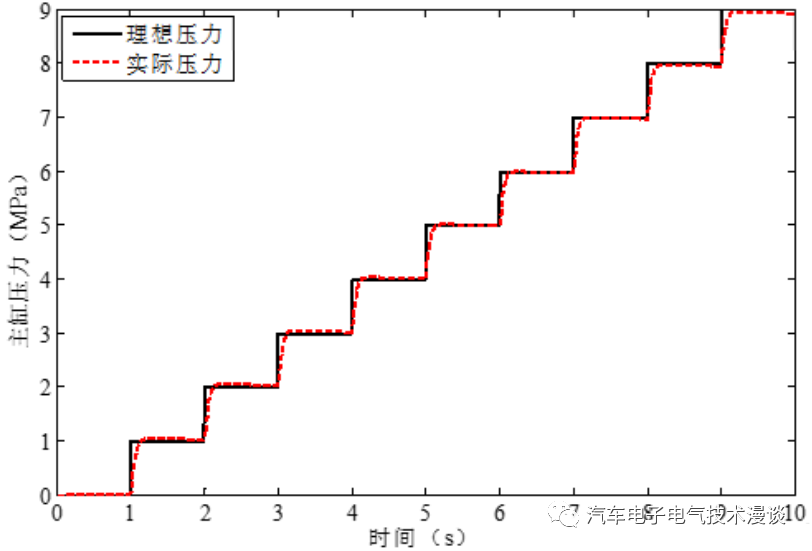
主缸压力阶梯信号响应曲线
1.3 线控制动性能
T-Booster控制器接收目标主缸压力后,解算并发送电机控制命令,实现目标制动压力的跟随控制。下图为线控制动过程中的推杆行程获取以及制动压力的跟随控制效果。在整个制动过程中,主缸实际压力始终较好的跟随理想制动压力变化。
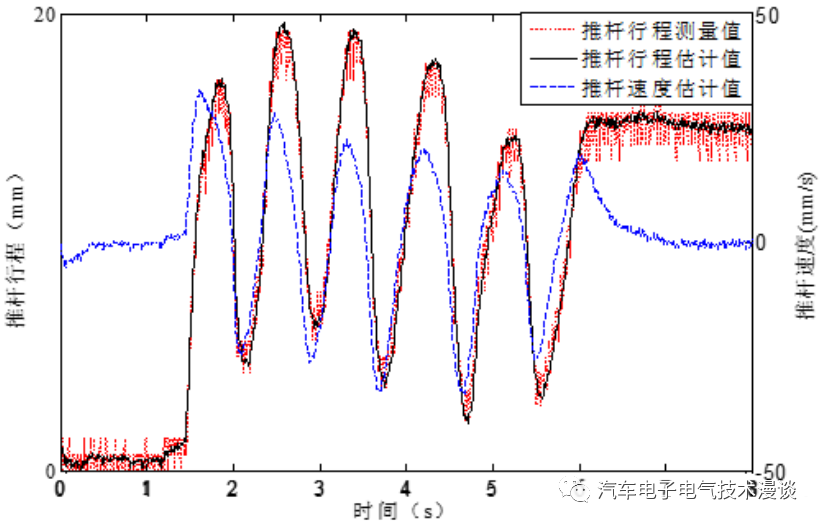
推杆行程估计
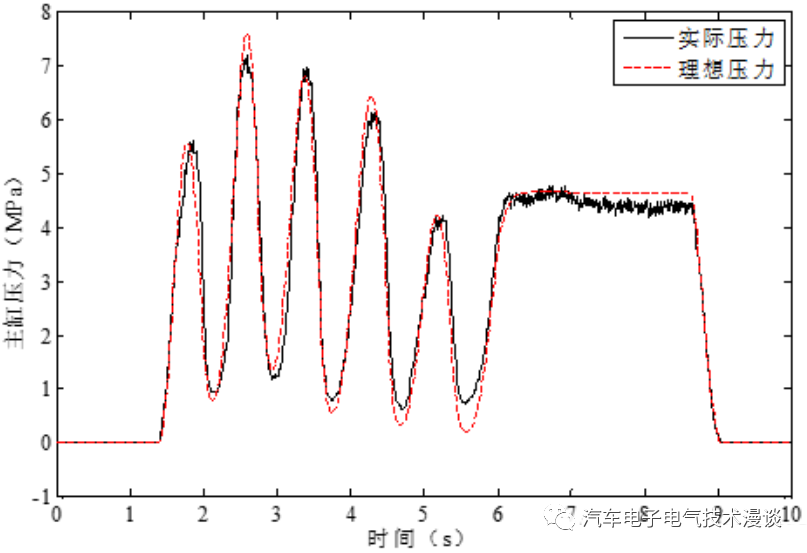
制动压力跟随控制
-2 T-Booster与ESC耦合制动系统
2.1 耦合制动系统
T-Booster与ESC深度耦合的线控制动系统具备更高的响应速度和控制精度,匹配费用与博世相比大幅下降。当T-Booster系统发生故障或车载电源不能满负载运行时,ESC系统可以迅速提供制动实现第一道安全失效备份;当车载电源失效时,T-Booster系统依然可以通过纯机械方式建立制动压力,实现第二道安全失效备份。

下图为耦合制动系统的结构图,T-Booster可以单独实现电动助力制动及主动制动功能,T-Booster和ESC结合可以实现线控制动、制动能量回收及双安全备份制动功能。
T-Booster与ESC耦合制动系统结构图
2.2 制动能量回收
下图为T-Booster与ESC耦合制动系统制动能量回收试验曲线。图中紫色线是踏板力,当踏板力较小时,单独由电机进行回馈制动。当踏板力大于一定程度时,表示驾驶员期望制动力矩较大,电机再生制动力矩无法满足需求,此时液压制动介入。
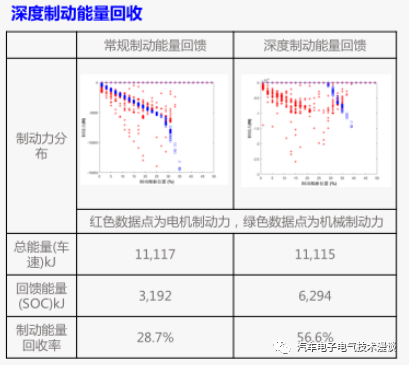
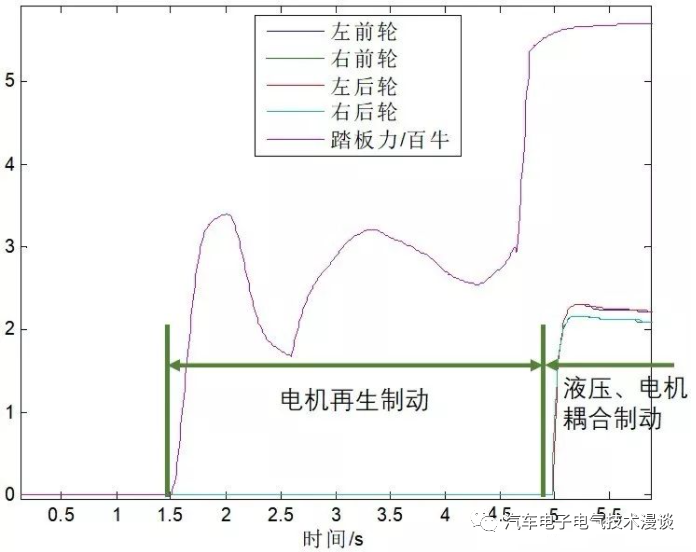
制动能量回收试验曲线
五、分类
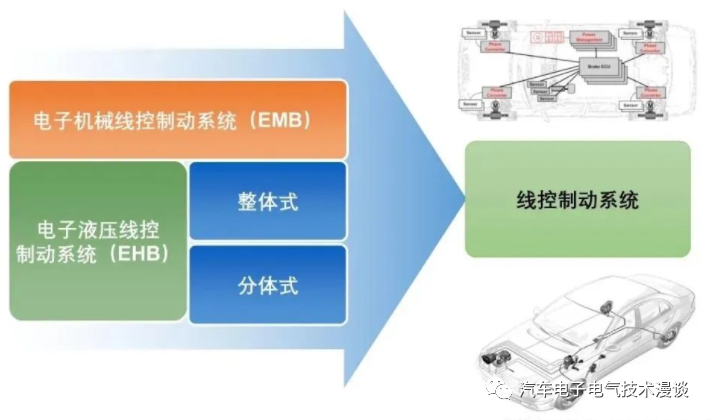
由于技术发展程度的局限,目前出现的线控制动系统是电子制动系统,根据乘用车线控制动系统的实现形式不同,根据实现的难易程度分成了两条技术路线,目前线控制动系统可分为电子液压制动EHB系统和电子机械制动EMB系统两类。
(1)电子液压制动系统EHB
1)EHB从结构上分:
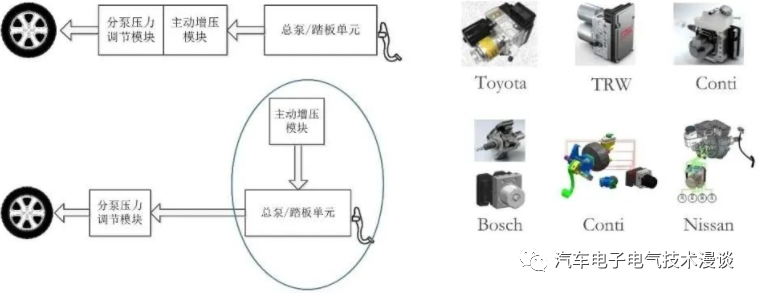
整体式:总泵踏板单元、主动增压模块、压力调节模块集成在一个部件内。
分体式:总泵踏板单元和主动增压模块集成在一个模块中,分泵压力调节作为另一个单独模块。
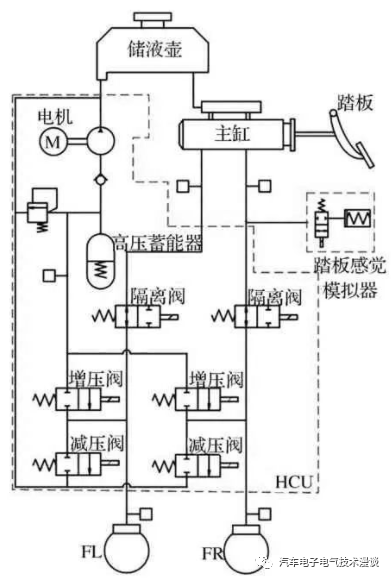
2)EHB系统目前主要有两种:一种由液压泵和高压蓄能器提供动力源(P-EHB),P-EHB系统ECU获取制动信号后,向电动液压泵发出相应的电信号,将足够的制动液泵入高压蓄能器,利用高速开关阀实现车辆的制动;另一种由电机和减速机构为动力源(I-EHB),同时集成电控模块。I-EHB系统主缸液压力由电机通过减速机构提供,电机接收来自控制器的制动信号,经过减速机构直接推动主缸活塞对制动主缸进行建压。相较于P-EHB,I-EHB结构更加紧凑、响应快速,更易于集成诸如EPB、ESP等多种主动安全功能,解耦单元使得整套系统灵活制定制动方案,不仅节约了成本,更可缩短车辆的开发周期。
3)三种典型的EHB系统,第一个是博世的SBC系统,它是一个最典型的EHB系统,常规制动时备用阀打开,通过控制增压泵与减压阀的通断状态来完成轮缸制动液的增压和卸压工作。常规制动失效后,控制器会打开备用阀,启用备用的制动系统,通过踩踏制动踏板,可以对两前轮进行制动;第二个是丰田的ECB系统,整体结构上原理上跟SBC是类似的,应该说所有的EHB系统基本上原理都是类似的,但是丰田这里有一种全新的设计,因为前制动器的缸径一般都比后制动器的缸径大,那么它在制动完成之后,液压开始降压回流的时候,这时前轮回油管路油的流速和后轮的流速是不一样的,两个回油管路的结合处,因为流速的不一样,丰田认为会产生一种脉冲,这种脉冲会随着后制动器的回油管路逐渐传递,造成很大的噪音。基于这个考虑,在后制动器回油管路上增加一个脉冲的抑制装置,叫做阻尼设备;第三个是清华大学的DEHB系统,这个系统主要针对分布式驱动,主要有一个全新的设计,增加了一个保压阀的设计,在每个轮缸的管路上都增加了保压阀,达到一定的压力之后,它可以保持这个压力,这个时候电机就不用持续工作了,可以减少电机的工作负荷。
4)按照踏板的解耦形式又可以分为全解偶和半解耦方式。
5)目前EHB有着不同的实现形式,按照ESC、ABS系统等功能是否和电子助力器集成的一体化形式,分为 One-Box形式和Two-Box两种技术类型。One-Box为EHB集成了ABS/ESP,只有一个ECU,新一代IPB则为one-box方案;而Two-Box需要协调EHB ECU和ESP ECU的关系。以two-box方案的ibooster为例,必须和ESP hev配合才能与踏板解耦,采用协调式能量回收策略。
6)EHB根据技术方向还分为三类:
①电动伺服:电机驱动主缸提供制动液压力源,代表产品Bosch Ibooster, NSK
②电液伺服:采用电机+泵提供制动压力源,代表产品Continental MK C1, 日立
③ 电机+高压蓄能器电液伺服:ADVICS ECB
以上关键部件包括:电机、电磁阀、油泵、电液控制单元、蓄能器,这些部件集成在一起,形成了机电液集成程度非常高的EHB产品。
(2)电子机械制动系统EMB
1)电子机械制动器按其结构特点和工作原理可以分为无自增力制动器、自增力制动器两大类。
①无自增力制动器:
电动机通过减速增矩的机械执行机构产生夹紧力作用到制动盘上,制动力矩与制动盘和摩擦片之间的压力、摩擦系数成线性正相关,控制驱动电机轴转角大小即可实现对于制动转矩的控制,控制系统相对简单,制动器的工作性能稳定,但对于电机的功率要求较高,因而尺寸较大,如下图所示。
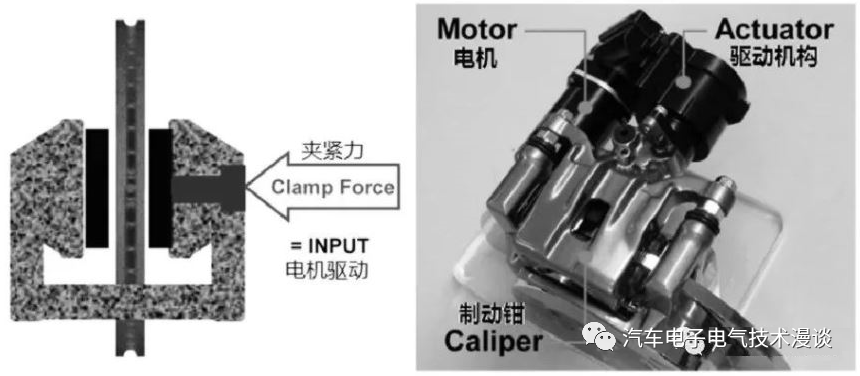
无自增力制动器

无自增力制动器结构图
②自增力制动器:
在制动盘与制动钳块之间增加一个楔块,制动工作时,制动盘的摩擦力使楔块进一步楔入制动盘和制动钳块,增大夹紧力,产生更强的制动效能,从而产生自增力效果,故又称为电子楔块制动(EWB,Electronic Wedge Brake),这一类制动器中,电机驱动楔块移动,与摩擦片接触后,自增力机构作用使压力增加,产生更强的制动效能,因此电机的功率较小,装置的体积和重量也较小,但 EWB 的制动效能取决于楔块的工作状况,因此对楔块的工艺及精度要求很高,不易加工。而且其制动稳定性相对较差,难于控制。如下图所示。
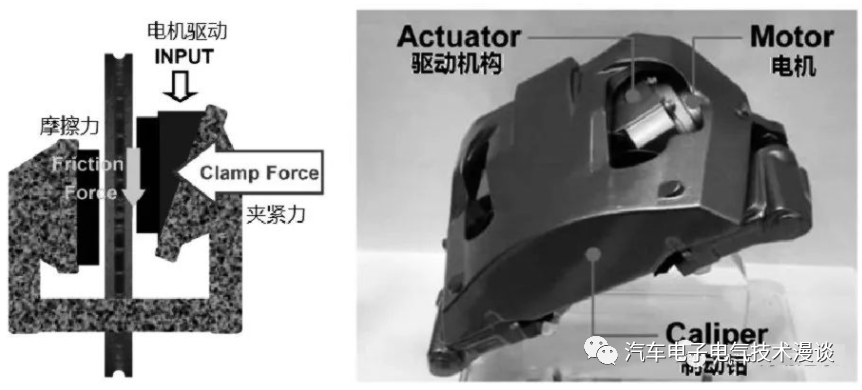
自增力制动器
自增力制动器结构图
2)按照制动器执行结构的盘式或者鼓式之分,EMB又可以分为机电盘式制动器 (Electro-Mechanical Disk Brake) 和机电鼓式制动器 (Electro-Mechanical Drum Brake)。目前更多的机构选择的是机电盘式制动器。
3)EMB从执行机构的差别上可以分成两类,第一类是电动机驱动执行机构然后作用到制动盘上;第二类是在前者的基础上增加一个自增力机构。第一类的典型代表是Continental Teves公司研发的制动器,German Aerospace Center的E-Brake属于后者。两类EMB各有优缺点,前者结构和控制都比较简单,制动过程更稳定;但由于电动机提供全部的制动推力,要求电动机必须输出很大的功率,这就造成了电动机体积、质量、能耗都比较大。后者由于增加了自增力机构,可以利用汽车的动能增加制动力度,所以驱动电动机的功率可以大幅降低,其能耗比前者减少83%,体积和质量也比前者小;不过由于多了自增力机构,制动控制的难度变大,制动稳定性也变差了。
六、优缺点 1.传统制动系统已难以满足当今汽车智能化、电动化对制动系统提出的新需求,线控制动相比传统的液压系统有明显的优势,将使得线控制动技术取代传统的以液压为主的制动系统,成为未来制动系统的主要发展方向。 汽车线控制动技术具备独特的特征与优点,主要优势和隐患体现在以下几个方面: ①该技术能够降低对驾驶人员精力的消耗,在提高其驾驶舒适度的同时,增加了安全性。 ②此项技术能够为汽车行业的发展带来新的方向,提供了更广阔的设计空间,不仅能够促使设计方向更加个性化,还能提升性能,吸引更多的顾客。 ③此项技术能够大量减少维护所消耗的费用,也减少了维护所用的设施。但在现阶段,电子设备还具有一定的安全隐患,比如当电路失效后,很有可能导致油门的控制失灵、或是无法安全制动等,因此,今后的发展和研究要重点关注其安全性能,从而更好地提升车辆行驶的可靠性。
如下几个传统制动系统的痛点,恰恰是线控制动的优势,
①不受真空度的限制,所以不会因为海拔高度升高而制动变硬的情况; ②踏板感可调,可以根据主机厂踏板感DNA调节出对应的踏板感觉; ③主动制动响应较快、对于ACC/AEB工况的适应性更强; ④具有很好的制动冗余(Two-Box)满足L3制动驾驶的需求 ⑤能量回收优于ESP Hev方案 与传统的制动系统相比, 线控系统具有十分明显的优势, 具有以下优点:
①系统结构简单更简洁了,整车质量低。
②线控制动系统具有精确的制动力调节能力,是电动汽车摩擦与回馈耦合制动系统的理想选择。
③便于扩展和增加其它电控制功能。基于线控制动系统,不仅可以实现更高品质的ABS/ESC/EPB等高级安全功能控制,而且可以满足先进汽车智能系统对自适应巡航、自动紧急制动、自动泊车、自动驾驶等的要求。
④导线取代了液压管路,不存在由于管路冗长带来的制动滞后问题。(EMB) ⑤无制动液,易于维护。由于没有使用制动液, 而且结构也比较简单, 因此其维护工作比较简单, 而且系统的耐久性也比较好, 从环保角度看也比较优秀。(EMB) ⑥与传统真空助力制动系统相比,线控电子液压制动系统具有高性能主动制动、大幅提高制动能量回收率、制动感觉可调、集成度高、扩展性强等诸多优势(EHB) ⑦可以使用具有容错功能的车用网络通讯协议。
⑧使车辆制动控制的鲁棒性得到了增强。系统中车辆每个轮子上都会配备独立的制动控制器, 因此能够通过更好的算法来完成制动力控制, 从而保证制动控制系统能够应对较为复杂工况条件。
这些优势使得线控取代液压成为了未来的趋势,但在技术方面存在的诸多问题,也导致了线控发展的缓慢。其中有几个也是线控制动系统最大的目前没有办法完全实施量产化的最大的制约因数。
2.电子液压制动系统EHB有许多优势,
①传统的制动系统在长期使用后,由于各部件的磨损和变形,会导致制动性能的衰退。而EHB会利用算法弥补部件的磨损和变形,使制动性能长期处于良好状态。
②EHB可以根据各个车轮的转速和附着力为其分配最合适的制动力,十分方便实现四轮制动分别控制,这就做到了制动的高度灵活性和高效性。
③EHB不但能够提供高效的常规制动功能,还能发挥包括ABS在内的更多辅助功能。
④EHB无发动机提供真空助力,体积更小、重量更轻,EHB内部没有运行真空助力器所需要的真空生成装置,结构更简单紧凑,发动机舱内的可用空间将增加。
⑤EHB的一切均为电气控制,能够实现制动器的电动驱动,响应也更加迅速,与标准的真空助力器系统相比,反应速度更快,产生的摩擦力也更大,提供的性能更为稳定,EHB在紧急情况下的制动力更强,并且产生的制动速度也更快,并可在应对道路紧急情况时缩短响应时间,提升驾驶员与乘客的安全保障。EHB具备高性能主动制动、高效率制动能量回收、制动感觉可调、高集成度、高安全性、扩展性强等诸多优势,可完美取代真空助力器、电子真空泵、真空罐等传统制动系统部件。
⑥EHB通过软件容易集成ABS、 TCS、ESC等辅助功能,兼容性强,可以进一步提高行车的安全性及舒适性。
⑦EHB系统仍保留了传统的液压管路部分,是电子和液压相结合的产物。与传统的液压或气压制动系统相比,EHB系统增加了制动系统的安全性,使车辆在线控制动系统失效时还可以进行制动,由于具有冗余系统,安全性在用户的可接受性方面更具优势;EHB在高级驾驶辅助系统方面也有优势,并且踏板解耦,能够主动制动以及能量回收,使电动汽车EV在制动能量回收(即将制动系统的能量带回电池)方面具有显著优势;EHB为整车控制提供了更迅速更精确的执行器,但其对液压力控制的精度和控制算法的鲁棒性要求也进一步提高;与传统制动系统相比,EHB系统主动控制在制动工况中的所占比重越来越高。
⑧EHB是在传统的液压制动器基础上发展来的,此类型产品成熟度高,相对来说开发、验证难度不大。
3.EHB缺点: 备用系统中仍然包含复杂的制动液传输管路,液压系统结构复杂,使得EHB并不完全具备线控制动系统的优点;容易发生液体泄漏,有一定的泄露风险,存在安全隐患;成本和维护费用较高;由于EHB以液压为制动能量源,液压的产生和电控化相对来说比较困难,不容易做到和其他电控系统的整合;液压系统的复杂性对轻量化不利;应用过程中需要使用制动液, 而且存在控制时延长和结构复杂等方面的问题,从而给汽车的安全运行造成不利的影响。 现代的汽车电子化程度越来越高,新能源汽车和自动驾驶汽车的发展又进一步加快了这种趋势。在汽车越来越像电子产品的今天,EHB的优点并没有远远盖过它的缺点,所以,EHB的大面积普及并不被看好。
EHB面临的主要挑战:
①目前已经出现的 EHB 系统,无论是干式还是湿式系统,由于均需要液压系统参与,因此不能算是纯粹的线控系统;
②由于仍保留液压结构,虽然利用电机驱动,但响应时间不够迅速,作为智能辅助驾驶系统的底层执行器,仍有提升的空间;
③主动制动力有提升空间;
④集成度不够高,虽然相比于湿式EHB的3 boxes(ESP、Booster、高压蓄能器),iBooster 等系统的 two boxes(ESP、Booster 或者EHB、踏板感觉模拟器)的方案大大提升了集成度,缩减了体积,但是仍有向1 box 进步的可能,MK-C1和IBS等系统已经开始采用one box方案;
⑤对电动汽车而言,EHB有一定的漏液短路隐患。
4.EMB的优点:
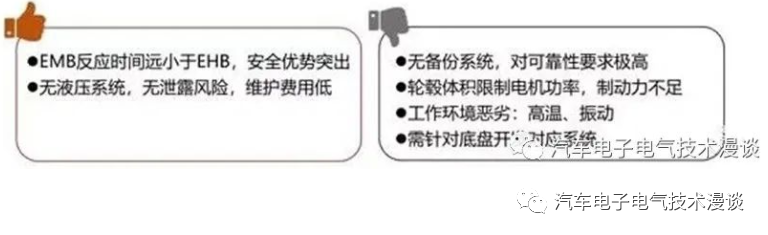
(1)执行机构和制动踏板之间无机械或液压连接,集成度极高,是完全解耦的制动系统,由于取消了主缸、液压管路等复杂的零部件结构,制动更迅速,制动力的传递效率得到提升,踏板信号与执行器之间完全靠电子信号传输,缩短了制动器的反应时间,反应灵敏,反应时间在100ms以内,EMB系统响应时间迅速,仅为90ms,比iBooster快了30ms,制动响应速度大大提高、更加迅速,执行速度快,有效减少、大幅度缩短制动距离,安全优势极为突出。制动系统的相应时延关系到汽车的运行安全, 在传统的机械和液压制动系统中, 由于存在运动惯性和间隙等结构问题, 制动命令发出后, 会延迟一定时间后才能够完成执行操作, 给汽车的行驶安全带来了安全隐患, EMB中没有液压驱动部分,工作稳定性和可靠性更好,使用电信号控制电机驱动,使制动系统的响应时间缩短,通过应用EMB系统能够极大地减少制动控制的时延, 极大地缩减制动相应的时间,从而给紧急情况的处理带来更多的时间。
(2)整个系统中不需要助力器,省去液压管路,不存在漏液问题,取消了制动系统的液压备份部分,EMB系统结构显得更简洁了,结构更简单,体积更小,让出布置空间,减少空间,由于是独立的制动系统,布局上更加灵活,布置灵活;EMB结构精简,简化了制动系统的结构,结构极为简单紧凑,制动系统的布置、装配和维修都非常方便,易于装配和维护,便于安装调试,更为显著的优点是随着制动液的取消,使汽车底盘使用、工作及维修环境得到很大程度地改善;同时由于减少了一些制动零部件,大大减轻了系统的重量,能够降低整车质量,提高汽车燃油经济性;没有液压系统,无需制动液,不存在液压泄露问题,降低了环境污染,环保。
(3)ABS模式下无回弹震动,可以消除噪音。
(4)EMB完全实现了电子化,制动平台开放度更高,通过ECU直接控制,易于实现ABS、TCS、ESP、ACC等功能,可以很容易地与汽车的其他电控系统整合到一起,能够发挥更多重的功能:制动、ABS、EBD、ESP、自动驾驶、优化能量回收,可完美配合再生制动等,便于集成电子驻车制动、防抱死、制动力分配等附加功能,直接在控制器添加代码即可;能够实现和其它控制功能的集成,X.By.Wire技术能够提供硬件和功能的集成平台, 从而能够实现制动、油门和转向等独立控制系统的集成, 使这些控制系统都集成到统一的平台上, 通过计算机进行调控, 这样能够实现控制系统的无缝连接。与ABS、TCS、ESC等模块配合实现车辆底盘的集成控制,是真正的线控制动系统,便于底盘域控制及智能驾驶技术发展。传感器信号的共享以及制动系统和其它模块功能的集成,便于对汽车的所有行驶工况进行全面的综合控制,通过这样的集成能够极大的提升汽车的操作性和安全性, 而且还使汽车的设计更加的智能和灵活;EMB系统能够实现每个车轮制动力的独立控制, 这样能够使轮胎的地面附着力达到最佳, 这样可以实现不增加硬件的情况下, 依靠软件来实现防抱死控制和电子制动力分配等功能。
5.EMB的缺点:
EMB使用本身工作环境恶劣,电子元器件易受干扰,系统工作的安全性和可靠性还有待提高;EMB要求助力电机的性能优越、反应迅速、体积小巧,在电机设计上难度很大,成本很高。
(1)由于完全采取线控的方式,无液压备用制动系统,取消了机械连接,没有机械冗余,没有失效备份,因而对系统的工作可靠性和容错要求更高, 或需要备份系统或存在对应的后备执行系统来保证可靠性。因此必须具有很高的设备可靠性,制动系统必须配备可靠的冗余方案。虽然在现阶段,可通过其他技术来提升整体系统的安全性,但还是需要保留一个基本的后备系统,若在电子控制单元中,发生故障时,便能及时开始启动;如果电路出现短路、断路,或者电源出现问题,制动系统怎样继续发挥功能?制动踏板模拟器不能正常工作又该如何处置?是容错的要求,因此需要在系统的可靠性上着重加强,还要设置意外情况下的保险功能。包括稳定的电源系统、更高的总线通信容错能力和电子电路的抗干扰能力。由于去除了备用制动系统,EMB系统需要有很高的可靠性,关于容错的要求则是:容错的情况会根据场合的改变而变化,且在控制器等中存在备份。还需要可靠性更高的总线协议和强抗信号干扰能力,尤其是需要解决车载电源失效问题。一般来说是需要有容错功能的总线协议,目前整车环境还没有普遍采用这样的总线协议;需要更好的抗干扰能力,地面车辆运行会遇到各种干扰信号,目前来说电动汽车在EMC方面问题还是很多的,这方面的问题有一些也是比较难以解决的。 (2)制动力不足的挑战。EMB取消了原有液压系统,将电机直接集成在制动钳上,必须布置在轮毂中,执行机构安装在制动钳上,因轮毂处布置体积决定制动电机不可能太大,制动电机的设计受限,电机功率限制,制动力不足;空间非常有限,只能采用小型永磁式制动电机。目前的小电机提供的刹车力不足,小电机无法满足普通轿车制动功率1-2kW的要求。纯靠永磁电机产生的制动力有限,要想大规模普及到前后车轮上还需要永磁体性能得到突破。 (3)工作环境恶劣,工作温度高的挑战。特别是高温,刹车温度达几百摄氏度,制动系统在长时间或高强度工作时会产生高温,所以关键部件的抗高温性能和散热性能非常重要;刹车片产生的高温巨震环境对电机稳定性、芯片半导体和永磁材料造成巨大考验;且布置空间有限,无法装散热装置,加剧了这一挑战。制动器需要能够耐高温,质量轻,成本低。是关于执行器的要求:首先,需要具备良好的高温性能,能够承受住执行器周边的较高温度,其次,需要开发一些质量轻且价格实惠的制动器,且尺寸满足车辆设计的需求。因属于簧下部件,振动高,制约现有EMB零部件的设计。如:因空间限制,制动电机只能采用永磁式,而最好的磁王钕铁硼(N35牌号)工作上限80℃,310℃磁性消失,制动电机无法工作。另如:EMB部分半导体需工作在刹车片附近,不能承受几百度的高温,且因体积限制难以配置冷却系统。制动器需要具有更好的耐高温性能,同时需质量轻价格低。

(4)EMB需要用非常精密的电子电路才能运行,但在车辆的行驶途中,会接收到来自不同种类的干扰信息,要面对外部的各种电磁场和地球磁场,这就需要电子电路有更好的抗干扰能力,抵制车辆运行中遇到的各种干扰信号。关于抗干扰的处理最常见的是“对称式”、“非对称式”两种,两者各有各的优势。除此之外,线控制动系统的软件和硬件要进一步完善,从而满足不同车辆的有效需求。只有进行全面化考虑,才能创建其科学化的总线系统,进而获取良好的控制系统。
(5)驱动电源问题,首先,是执行器能量需求,制动能量需求比较大,需1-2kw电机:传统的鼓式制动的功率要求是100W,而盘式制动则需要1000W,执行制动动作的电动机会消耗不少的电能,目前的12V车载电源可能无法胜任,如果车辆电气系统的整体电压维持在12V,是很难保障能够满足其运作需求的,因此,执行器对于能量的需求非常关键。应该为其建立起足够电压的系统(一般是保持在42伏特),未来需要成熟可靠的42V或48V电源高压系统提高电机功率来保证系统的能源供应,同时还需要应对高压所隐藏的安全隐患。42V电压系统从目前发展的趋势看也是一种发展的方向,但是目前来说暂时没有大批量的出现。
(6)需要针对底盘开发对应的系统,难以模块化设计,导致开发成本极高。由于EMB是全新的技术,又需要大量传感器和控制芯片的支持,导致成本比现在主流制动系统高,因此降低成本增强竞争力是EMB能否走向市场的决定因素。市场上还没有成熟的EMB产品,制动系统功能安全等级要求高,产品周期长,投放到市场还需要各种验证。
七、需求挑战趋势
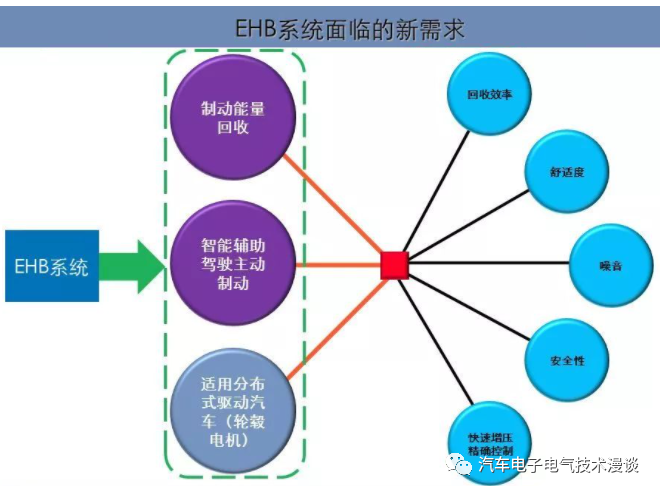
当前线控制动系统面临的主要需求是节能减排,在节能与新能源汽车产业发展规划中提出了不管是乘用车和商用车都提出了燃料消耗量降低的目标要求,包括新能源汽车发展的要求。汽车智能辅助驾驶技术的发展需要EHB系统作为一个执行机构来做配合,这是EHB系统目前面临的一些新的需求,第一个因为电动汽车目前来说普遍的都具有能量回收功能,它需要一个制动能量回收功能,目前整车企业整车厂一般来说主要在做一个带档滑行回收的,这是一个开盘回收的过程;第二个就是智能驾驶,目前来说主要在ESC上实现,但其实无法支撑智能辅助驾驶需要的一个快速降压还有精度高的要求,那么EHB系统是可以达到这样的要求;然后是适用于分布式驱动的汽车,主要是指轮毂电机驱动的汽车。这里又衍生出来一个制动能量回收效率的问题,它又衍生出舒适度和噪音、安全性、耐久性的问题。纯粹的线控制动系统—电子机械制动系统EMB成为研究热点,该系统响应时间更快,平台开放度更高,同时不会有漏液隐患,这对电动汽车具有重要意义。
在汽车电动化和智能化技术的大潮下,汽车制动系统将产生新的发展趋势。
1.摆脱真空源
首先要求制动系统不再使用真空源助力,需要采用新的助力源,因此各种电动助力制动系统开始出现。
2.体积、质量更小、集成度更高
带有高压蓄能器的湿式EHB系统过于复杂、体积和质量均很大,并且响应时间略长,成本高、维修费用昂贵,新型制动系统向去掉高压蓄能器的方向发展。
3.系统更开放,可与其他底盘控制子系统配合
为了提高整车的综合行驶性能,要求制动系统是一个更加开放的平台,能够和其他底盘控制子系统集成。
4.再生制动与踏板解耦
为了解决电动汽车和混合动力汽车的续航里程问题,出现了制动能量回收技术,为了与再生制动协调工作,要求制动系统在保证高的制动能量回收效率的同时具有解耦能力,液压制动系统应能根据驾驶员的制动需求合理分配再生制动力和液压制动力。
5.适用于智能驾驶辅助系统
随着汽车智能化技术的发展,制动系统的另一个发展趋势就是应能够与ESC、ACC等汽车智能辅助驾驶匹配,能够作为智能驾驶辅助系统的重要底层执行器。这就要求制动系统拥有更强的主动制动能力以及更快的响应速度和更精确的制动压力控制。
6.人机共驾
随着执行控制层面人机共驾技术的发展,要求制动系统具有能够个性化定制踏板感觉和制动特性的能力,车辆匹配各种不同的驾驶风格和驾驶模式。
7.具备更平顺的“软”停车功能、更好的
NVH性能这要求制动系统响应必须足够精确、迅速和舒适。例如当车辆开启ACC自适应巡航时,博世的iBooster可以确保车辆在制动直到停驶过程中的制动舒适性,在此过程中几乎不产生任何振动和噪声。
8.系统线控
汽车底盘电动化,而线控制动是底盘线控化的最大障碍,目前市场上没有成熟可靠的量产解决方案。域控制等都离不开线控制动系统。
随着汽车技术向低碳化、智能化发展,制动系统未来的研究方向将沿着这八大趋势进行,即未来的制动系统将向更节能、更开放、更精确、更快速、更智能、更安全、更舒适的方向发展。
制动行业正在变革, 未来将是线控制动系统蓬勃发展的时期,线控制动是电动化、智能化的必然选择,电动化和智能化趋势共同指向一个方向:汽车制动系统将与踏板解耦,向电子化、线控化转变。
编辑:黄飞
-
汽车制动系统原理解析 如何检查汽车制动系统2024-11-28 1890
-
亚太股份:线控制动系统迈入量产阶段2024-05-13 1638
-
英创汇智推出100%国产器件的汽车制动安全系统系列产品ABS/ESC/EPBi2024-03-17 2273
-
电子驻车制动系统EPB介绍2021-09-15 2339
-
分享一种不错的汽车抱死制动系统ABS/ESC方案2021-05-12 2642
-
什么是天合最新制动系统技术?2019-09-24 3187
-
汽车电子行业是将电子信息技术应用到汽车所形成的新兴行业2019-06-26 3854
-
汽车电子技术的应用方向-汽车车身网络系统2015-08-17 16108
-
汽车电子系统列表2013-05-08 5406
-
电子制动系统概述2012-05-02 6048
-
电子稳定性控制系统ESC解决方案2010-04-12 5888
-
什么是汽车的电子制动力分配系统(EBD)2010-03-12 1352
-
汽车制动系统,制动系统什么意思2010-03-11 4425
-
CPLD在汽车制动性能检测系统中的应用2009-04-16 3668
全部0条评论

快来发表一下你的评论吧 !
