

对VASS标准PLC中信号控制漏洞的理解
描述
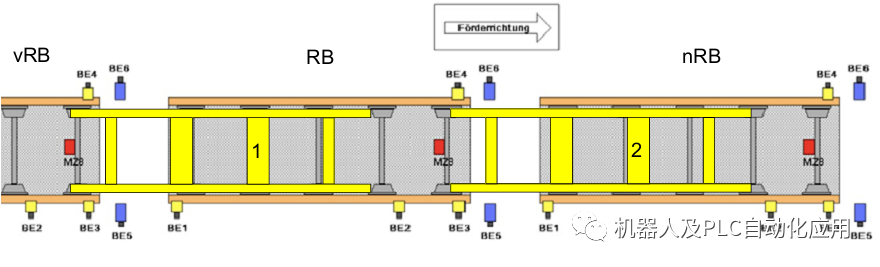
针对滚床线体工位完成信号的置位与复位的理解:
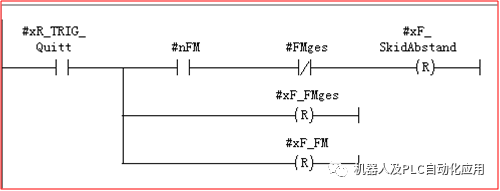
总完成信号的置位。
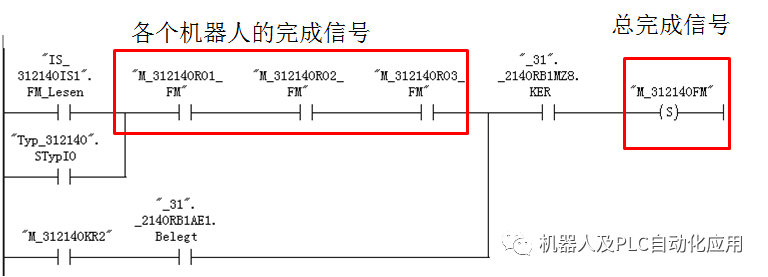
监测所有完成信号的都已被清除。

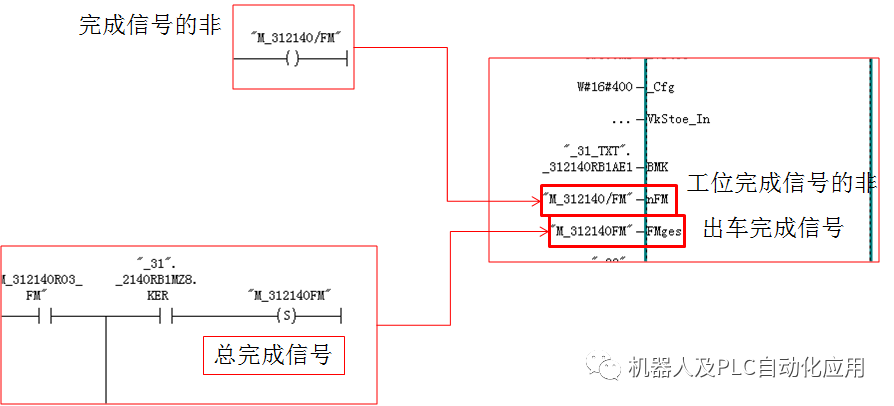
完成信号被使用在FB453的两个管角处,用来获取工位的完成信号,使其作为可以出车的条件。
工位的完成信号用滚床上的接近开关来实现倒车时的值位。
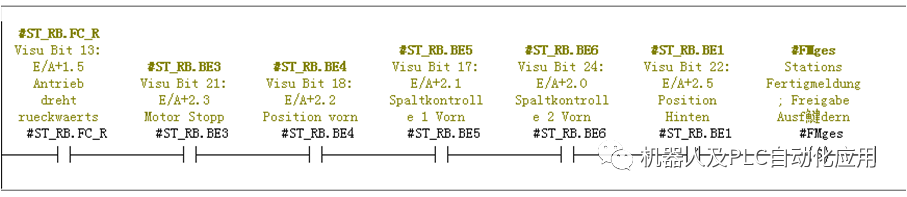
滚床上的BE2,BE3,BE4没有件就可实现过程中将工位总完成信号清除
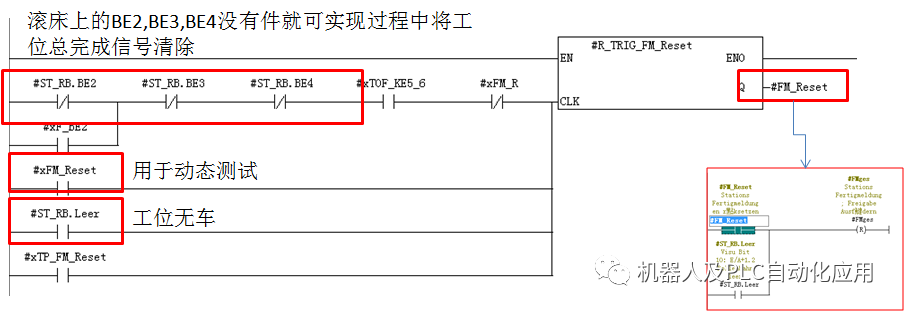
在功能块FB453里清除出车用总完成信号

在工位程序中使用“M_xxxxxFMReset”复位完成信号是用来清除单个分完成信号的
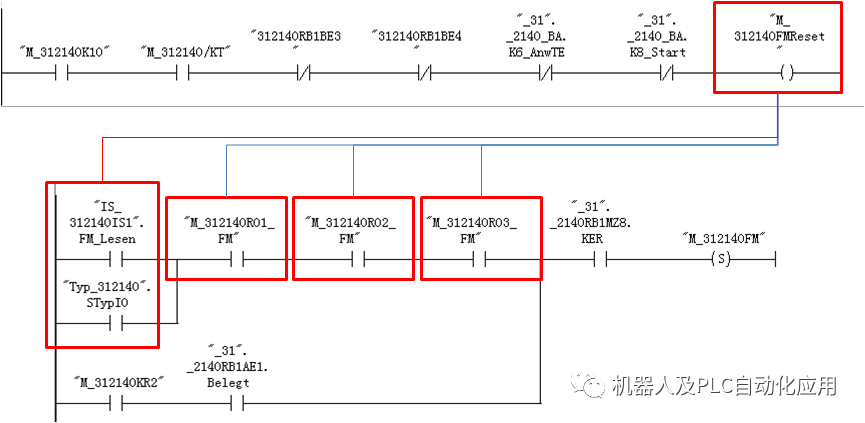
在工位程序中使用“M_xxxxxFMReset”复位完成信号是用来清除单个分完成信号的
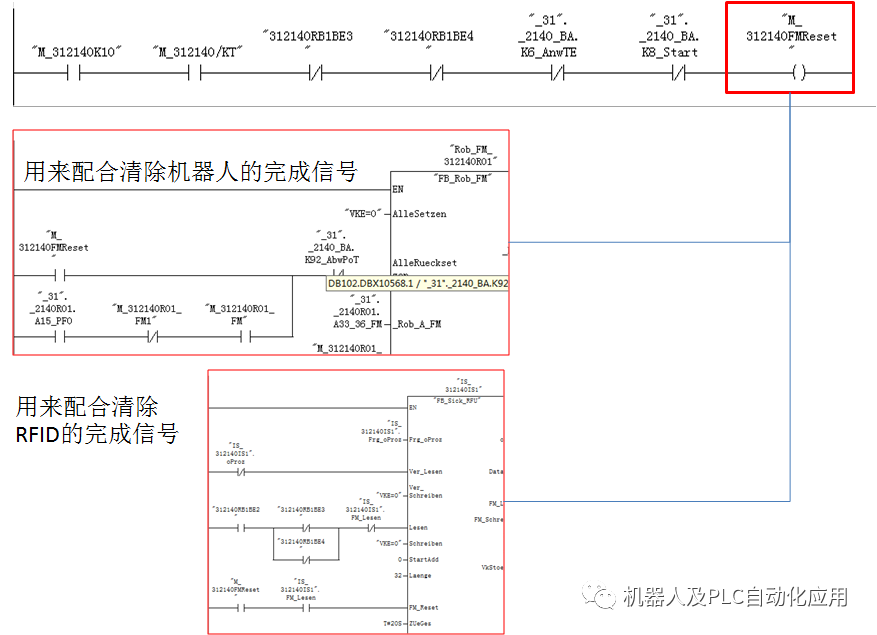
1.用来配合清除机器人的完成信号
2.用来配合清除RFID的完成信号
接近开关不到位会引起各分支完成信号不能被清除,最后会使得下一辆车到来时完成信号再次置位.但此时FB453块会提示0F故障

故障点15经10转16进制转换为故障0F
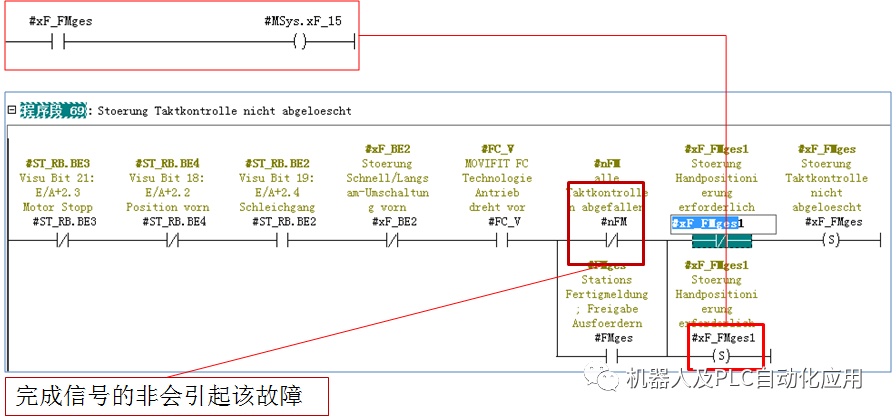
故障复位条件过于简单,只要复位就能把故障清除掉,这样容易出现,在本工位遗漏工艺的问题.
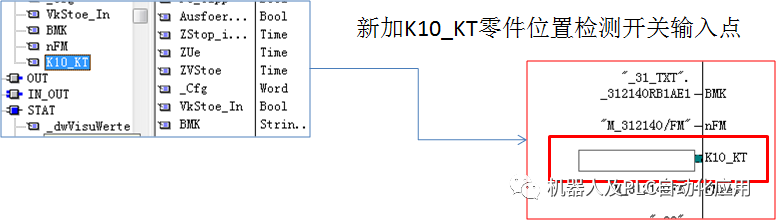
对VASS系统功能块的改进方案:在FB453中进行改进。
新加K10_KT零件位置检测开关输入点
住故障点防止点击复位后,将车发走.
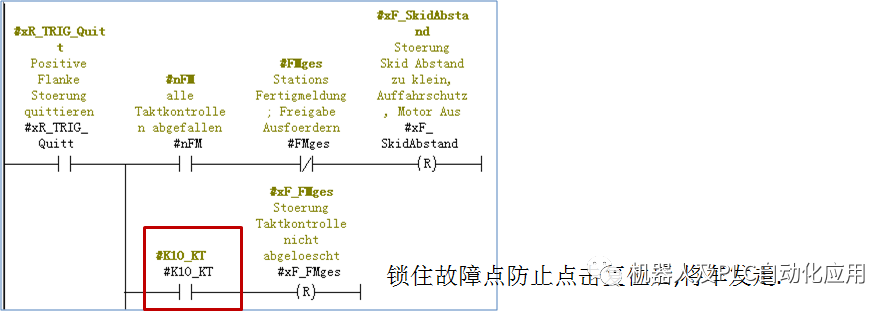
将工位的接近开关作为消除故障的前提条件.

审核编辑:刘清
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
Multisim中信号源如何产生带有谐波分量的信号?2014-11-06 14067
-
VHDL设计中信号与变量问题的研究2010-04-12 1488
-
STD标准中信号模型同步和门控机制研究2012-11-26 918
-
理解PHP反序列化漏洞2017-09-07 708
-
VASS标准PLC对机器人之间互锁信号的控制2020-08-07 4548
-
VASS标准中急停得接法与控制方法2020-12-23 5544
-
探究VASS的PLC顺序控制程序到底该如何使用2021-03-10 2691
-
S7安全门的控制与接线-VASS的控制2021-03-18 6384
-
从显示电子系统中信号波形动图理解传输的机理2022-03-22 2529
-
VASS 标准中的预期功能范围2022-07-15 3011
-
浅谈电子系统中信号波形的传输原理2022-11-30 1576
-
10款电子系统中信号波形动图,解析移动通信协议原理2022-12-06 4595
-
大众VASS06报警信息提示功能2023-01-05 2370
-
大众VASS V6标准中文手册及PLC程序模板下载2023-04-27 12062
-
显示电子系统中信号波形通信协议原理2024-02-28 928
全部0条评论

快来发表一下你的评论吧 !
