

PLC外部接线以及开关量信号和模拟量信号转换
工业控制
描述
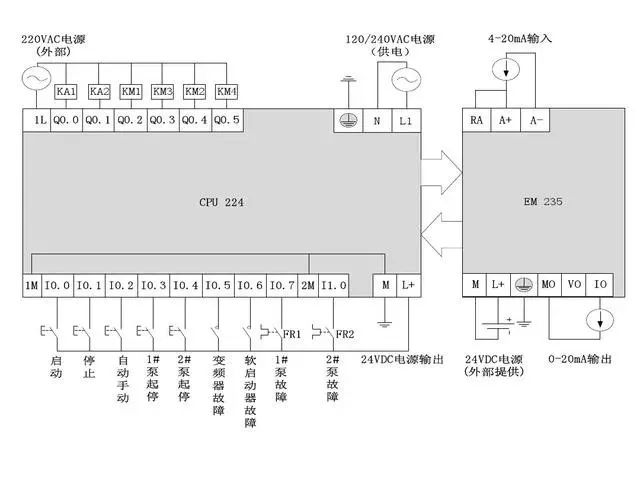
PLC自动化控制在电气自动化和智能化控制中应用相当的广泛,电力作业人员都知道。PLC的自动化控制除了需要输入既定的程序外,还有要对PLC本身进行输入端口和输出端口的接线,只有PLC的程序指令正确,输入端口和输出端口接线正确,PLC才能自动化控制,电工老师傅都知道,PLC既可以接受开关量控制也可以接受模拟量控制,二者是可以相互转换的,今天我们就重点来看看PLC的外部接线以及开关量信号和模拟量信号是如何转换的!
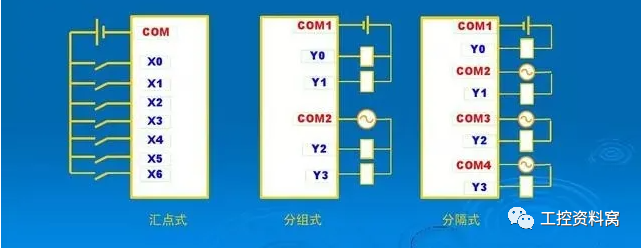
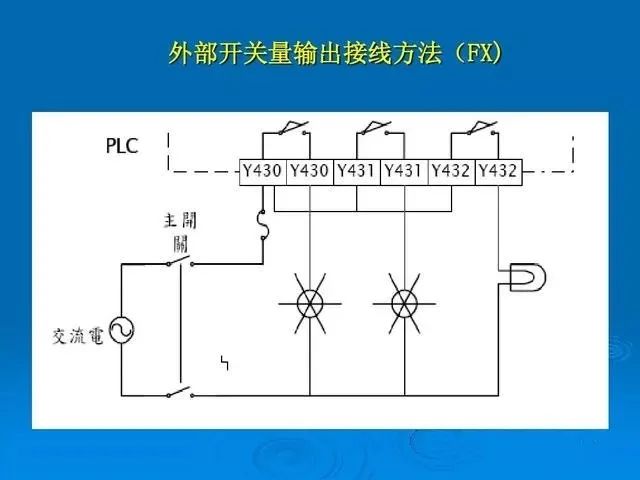
PLC外部接线——外部接线方式
汇点式……各个I/O电路有一个公共点,共用一个电源。
分组式……I/O分成若干组,每组I/O共用一个电源,各组电源可以不同。
分割式……各个I/O点之间相互隔离,每个I/O可以使用独立电源。
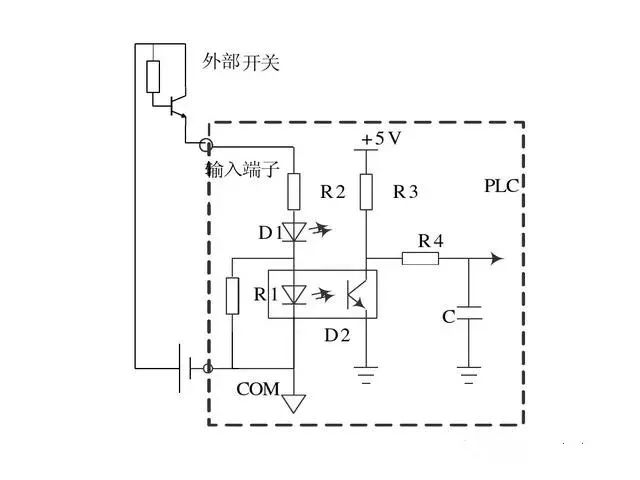
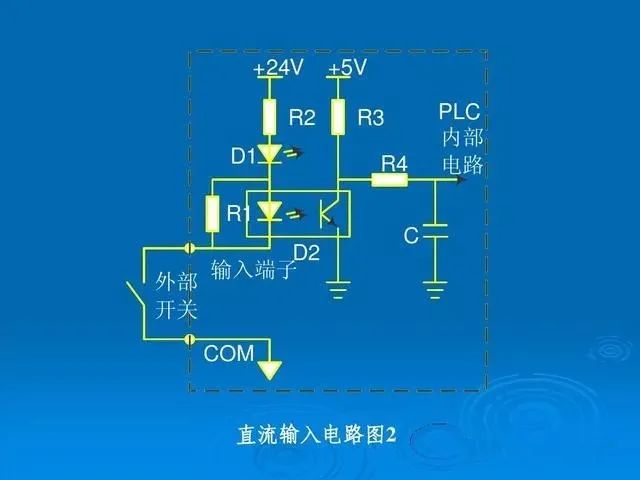
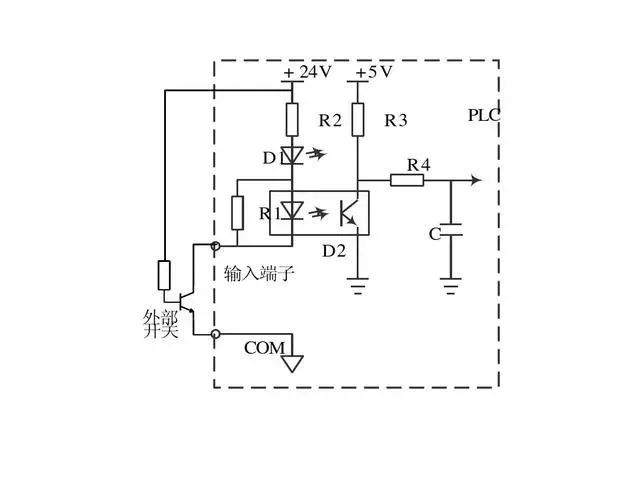
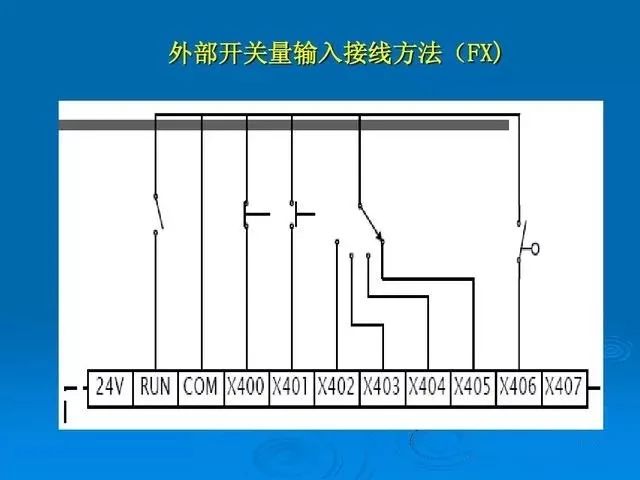
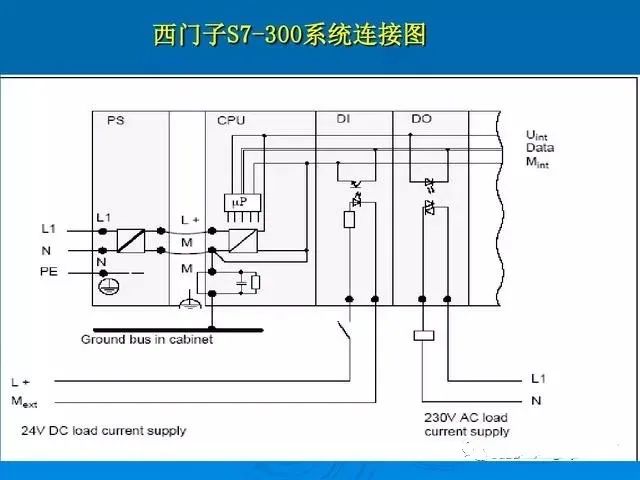
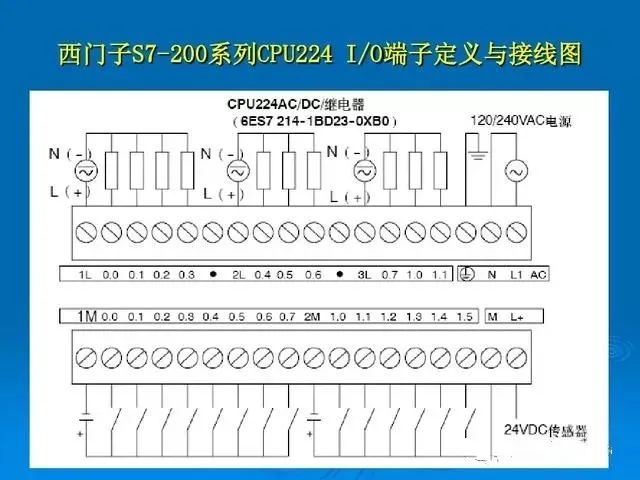
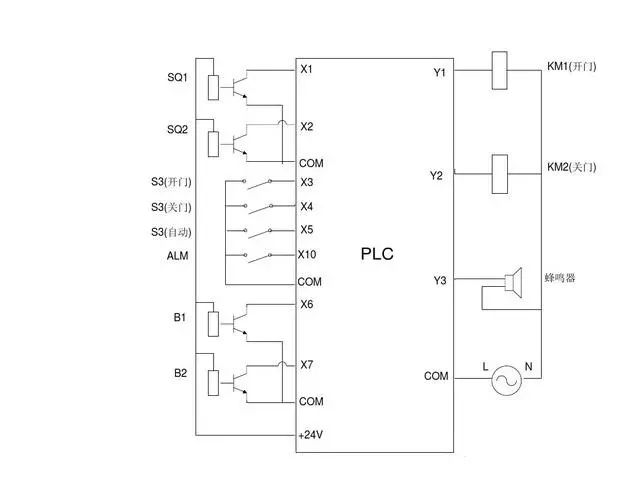
PLC外部接线——输入模块
输入接口作用:将按钮、行程开关或传感器等产生的信号,转换成数字信号送入主机。
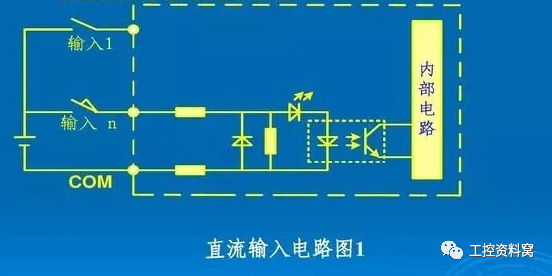
隔离电路采用光电耦合器,再经RC滤波电路送入PLC的CPU,可以防止外部干扰源和触点抖动等情况。
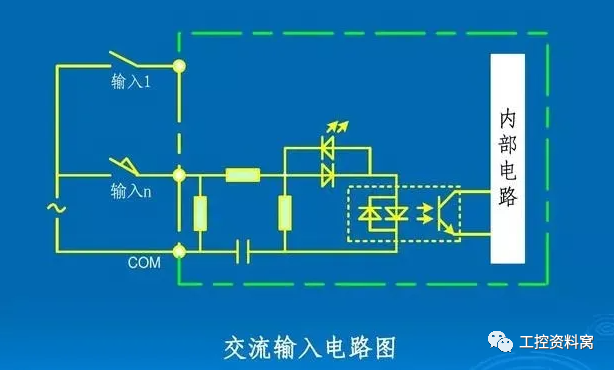
发光二极管和光耦均采用反并联结构,在交流输入的正负半波分别导通,C1起隔直作用。
PLC外部接线——输出模块
1)继电器输出:低速大功率
直流、交流负载(隔离、功率放大)
2)晶体管集电极输出:高速小功率
直流负载
3)双向可控硅输出:高速大功率
交流负载
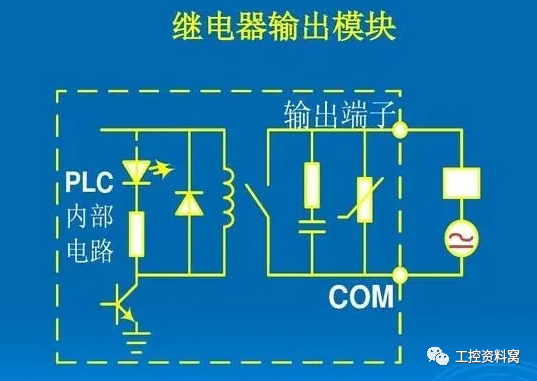
响应速度小于10ms,主要是由于机械触点动作延时造成。负载电源由外部提供,与触点并联的RC电路和压敏电阻用来消除触点断开时产生载电。
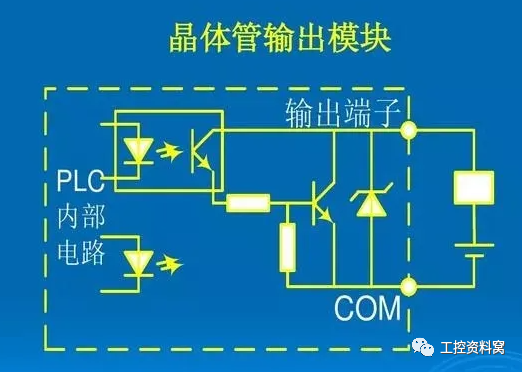
放大采用大功率晶体管或场效应管,响应速度小于1ms,晶体管工作在饱和导通状态和截止状态,图中稳压二极管用来抑制关断过电压。
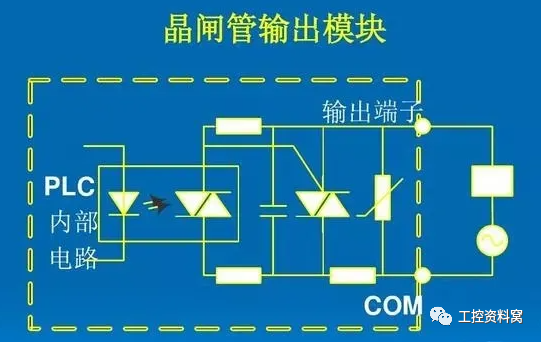
隔离采用光电可控硅,放大采用双向可控硅,响应时间有两种情况:可控硅由关断变为导通的延迟时间小于1ms,由导通变为关断延迟时间小于10ms.RC电路和压敏电阻用以抑制可控硅的关断过电压和外部的浪涌电压。
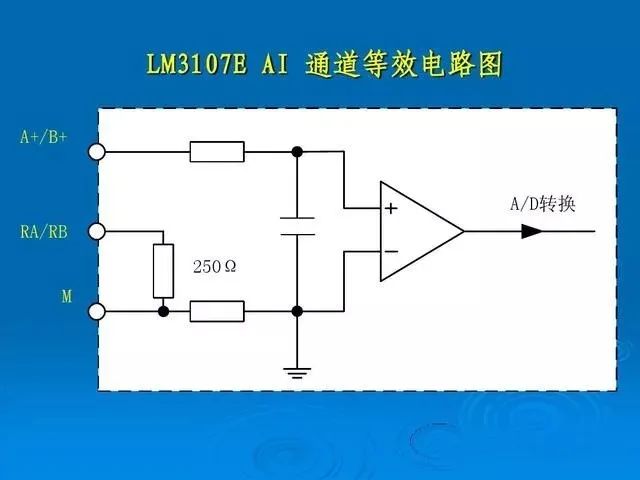
模拟量输入模块(A/D、AI)
A/D作用:将现场仪表输出的(标准)模拟量信号010mA、420mA、15VDC等转化为计算机可以处理的数字信号
A/D转换的性能指标
分辨力*——A/D接口变化一个LSB(二进制最低有效位)时输入模拟量的最小变化量例:12位A/D转换器,输入范围0-10VDC,分辨力=10/212=2.44mV
(通常分辨率以输入二进制数的位数来表示:10位、12位分辨率)线性误差——实际转换特性曲线与理想转换特性曲线之间的最大偏差。
包括:偏移误差(0输入非0输出)、非线性误差等。线性误差通常以LSB的分数表示:如士1/2LSB、土1LSB等
转换时间*——从启动转换到转换结束完成一次A/D转换所需要的时间
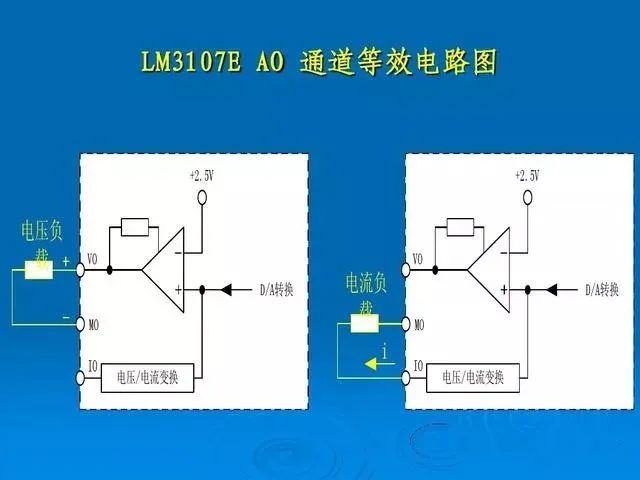
模拟量输出模块(D/A、A0)D/A作用:将计算机内部的数字信号转化为现场仪表可以接收的标准信号4~20mA等如:12位数字量(0~4095)→420mA;2047对应的转换结果:12mA
D/A转换的性能指标
分辨力——二进制变化一个LSB(最低有效位)时D/A输出模拟量的最小变化量(通常分辨率以输入二进制数地位数来表示:10位、12位D/A转换器)线性误差一一实际转换特性曲线与理想转换特性曲线之间的最大偏差包括偏移误差(0输入非0输出)、非线性误差等。
线性误差通常以LSB的分数表示:如士1/2LSB、土1LSB等建立时间一一当输入数字量变化时,输出的模拟信号稳定在相应的数值范围之内(土0.5xLSB)所经历的时间。
在目前工业4.0和智能制造2025的大背景之下,“机器换人”已是大势所趋,工业机器人也被誉为“制造业皇冠顶端的明珠”,机器人工程师因此也日益成为紧缺型的高薪职业。
编辑:黄飞
-
一文搞懂PLC接线难题2023-01-05 1407
-
plc开关量、模拟量转换2018-05-20 11334
-
PLC和接线 开关量和模拟量2019-06-19 3756
-
plc中的模拟量信号如何读取2019-11-12 13711
-
PLC对模拟量信号的处理过程2023-01-29 1306
-
PLC的外部接线方式 开关量信号和模拟量信号的转换方法2023-02-11 1323
-
PLC如何转换处理模拟量信号2023-02-15 2587
-
PLC如何转换处理模拟量信号?2023-07-09 1768
-
为什么不能直接使用从PLC读取到的模拟量信号?2023-10-23 2089
-
PLC开关量信号和模拟量信号如何转换?2023-12-17 3723
-
请问PLC是如何读取模拟量信号的?2024-01-02 2494
-
plc模拟量输出怎么接线 plc模拟量输出是什么信号2024-02-05 11789
-
模拟量信号和开关量信号的重要区别以及具体应用2024-07-21 2057
-
PLC对模拟量信号的处理过程及方法 详解版2024-07-30 1852
-
plc开关量模拟量的接线技巧2024-08-30 3979
全部0条评论

快来发表一下你的评论吧 !
