

基站波束成形系统的相位测量
测试测量实验
描述
本文介绍一种在工厂测试和工作期间测量多个发射机之间的相位差,以便基带处理器补偿这些失调的方法。
利用多天线实现高性能
为了支持新型应用,如智能手机之类,个人通信设备对数据吞吐速率的要求越来越高,在给定的带宽和覆盖区域,要提高吞吐速率,必须提高信噪比(SNR),这意味着需要提高功率,或者降低噪声,或者同时采取这两种措施。提高信号电平的一种方法是使用输出功率更高的功率放大器(PA),但这种方法会显著提高基站的运行成本,并且可能导致相邻小区的干扰增大。降低接收机系统噪声也是可行的,但要在一个已经优化的系统上获得若干dB以上的改善,可能需要付出九牛二虎之力。
如果使用多个信号路径和一个天线阵列,则可以使天线阵列的聚集辐射场型在目标接收机的方向上具有更高的增益,而在其它方向上的增益则低得多。在目标接收机方向上的较高发射机增益可提高接收机的信号电平,但同时也会对正好处于发射机窄波束内的其它接收机造成更大的干扰。指向发射机的较窄高增益接收场型可减小相邻基站和移动设备对接收机的干扰。这两种效应均能提高接收机的信噪比(SNR)。
图1显示一个系统架构的框图,其中四根天线共用同一信号。中间两根天线的导体呈回旋状,目的是强调所有天线的电缆长度必须相等。
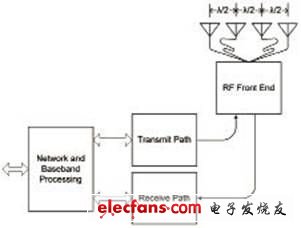
图1 4天线系统
图2显示该系统的仿真响应,假设这些天线为全向天线。天线位于穿过180度和0度的轴线上。该极坐标图的径向轴表示相对于单根全向天线的增益(dB)。

图2 相对于单根天线响应的4天线响应(dB)
波束成形和波束控制
图 1中的架构可用于目前的许多应用中,但要充分发挥窄波束系统的优势,必须进行动态波束控制(移动主波束)或波束成形(移动主波束和零陷)。波束控制要求基带处理器(BBP)改变各天线信号的相位,波束成形则要求BBP改变各天线信号的相位和幅度。除非另有说明,本文中的“波束成形”同时包括波束控制和波束成形。图3所示为一个波束成形实现系统。为清楚起见,图中仅显示发射路径。
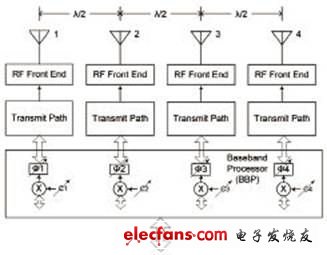
图3 提供波束控制/波束成形的4天线系统
针对波束成形设计了一些多用户协议,例如LTE。在LTE中,BBP可以分别调整资源模块(RB)的幅度和相位,因此即使在多用户子帧中也支持用户专用的波束。
如果BBP将天线1的数据移动-0.375λ,将天线2的数据移动-0.125λ,将天线3的数据移动+0.125λ,并将天线4的数据移动+0.375λ,则会产生图4所示的辐射场型。在这个波束控制示例中,BBP仅对数据应用相位校正。该图还显示两个瓣一致移动。如果不需要这样,可以使用定向天线阵列来消除不需要的瓣,同时为需要的瓣提供额外增益。
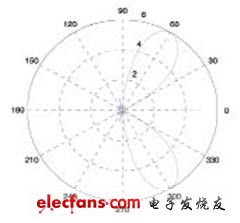
图4 相对于单根天线响应的控制4天线响应
图 2和图4所示的极坐标图反映的是理想情况,假设信号完全按照需要到达各天线。但实际上会存在偏差,导致各发射路径都存在独特的不良相移。这些相移可能会在每次系统上电时改变,而且可能随着器件温度的变化而改变。当发射机使用不同的本振,或者当到达各发射机模块的本振路径不同时,这个问题尤其突出。不同路径长度、温度漂移以及发射机路径之间的本振(LO)相位差所引起的不良相位失调,可能会改变辐射场型,从而使系统性能明显下降。例如,将区区5度的误差增加到各天线信号时(因而天线1 = -0.51λ,天线2 = -0.17λ,天线3 = +0.17λ,天线4 = +0.51λ),其结果如图5所示。
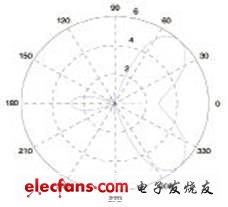
图5 存在不良相移的控制4天线响应
测量相位
显而易见,对于波束成形,系统必须能够测量各发射机输出的相对相位失调。完成相对相位失调计算后,除了用于波束控制的相位和幅度系数外,BBP还会对各信号路径应用一个校正因数。
图 6显示了一种确定相对相位失调的常用方法,即利用系统中的额外接收机。所示的曲线路径同样是为了强调从各RF前端到RF开关的路径长度必须相等。经过下变频、滤波和发射信号数字化后,计算相位Tan-1 (Q/I)以得出各路径的相位失调。然后,BBP将这些校正因数应用于波束成形系数。

图6 具有发射路径相位检测功能的4天线波束成形系统
下变频处理要求一个全功能接收机子系统,但接收路径的最大增益不需要像正常接收机那样高。这种解决方案会增加成本,但波束成形带来的利益更大。
通过集成降低成本
提高集成度可以在保有波束成形好处的同时,降低图6实现方案的成本。集成可分为多个级别。例如,整个接收机子系统或发射机子系统可以使用一个IC以降低成本。进一步的集成,例如将多个发射机和接收机集成到单个IC中,可以在保持波束成形功能的同时实现最低成本解决方案。
对于时分双工(TDD)系统,将接收机和发射机集成到同一IC封装中还能提供其它好处。这种情况下,接收机和发射机并非同时使用,因此在发送子帧期间,可以让接收机执行其它任务,例如测量发射机输出的相位。图7所示就是这种架构。图中显示的是发送子帧期间的情况。标为“Tx Monitor”的模块是被改派用场的接收机,用于在发送子帧期间测量耦合器的功率并提供I/Q数据输出。对于接收子帧,接收机电路断开Tx Monitor输入,作为正常接收机工作。
第一个2x2收发器的发射和监控路径使用内部LO。第二个2x2收发器的发射和监控路径使用不同的LO。LO的频率相同,但可能存在相位差,而且每次收发器上电时,该相位差可能发生变化。
图 7中,Tx Monitor 2的输出相位等于ΦAnt1(从发射路径中的LO 1到耦合器的延迟)加上ΦTxMon2(Tx Monitor路径返回LO 1的延迟)。图中将它表示为Φ(det)。如果两条粗线路径匹配,则Tx Monitor 3的输出 = Φ(det) + ΦAnt2 + ΦLO 2 - ΦLO 1。从该值中减去Φ(det)便得到Ant1与Ant2之间的相位差。其它天线路径的相位差可以类似方式求得。
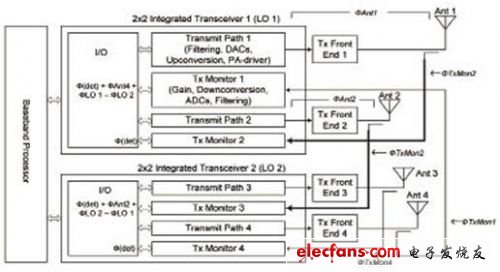
图7 集成波束成形系统
总结
波束成形是提高覆盖范围,同时减小对其它小区干扰的实用方法。在波束成形中,至关重要的是系统必须能够测量各信号与其相关天线的相对相位。接收机子系统可以执行这种功能,但集成器件能够在保有波束成形好处的同时,显著降低成本。
-
毫米波波束成形和天线设计2018-06-12 17968
-
雷达模拟波束成形和数字波束成形的区别2023-10-13 8539
-
一种波束成形系统的相位测量方法介绍2019-07-23 1990
-
【模拟对话】相控阵波束成形IC简化天线设计2019-10-01 3688
-
如何利用5G WiFi波束成形和LDPC技术提高无线连接性能?2021-05-21 1550
-
麦克风波束成形的基本原理和阵列配置是什么?2021-06-01 2674
-
无线网络中功率分配的安全波束成形2018-01-17 1044
-
波束成形的类型及其在RF PCB中的用途2020-11-04 5971
-
毫米波波束成形和天线技术的实例说明2020-12-29 1422
-
混合波束成形接收机动态范围理论实践2023-01-16 2246
-
如何实现毫米波波束成形和大规模MiMo?2022-08-15 2789
-
波束成形在AI引擎上的实现2023-09-13 696
-
麦克风阵列波束成形应用案例2023-11-23 831
-
天线波束成形的基础知识入门2023-11-24 2973
-
AN-1140: 麦克风阵列波束成形2025-01-05 475
全部0条评论

快来发表一下你的评论吧 !
