
资料下载


物联网临时门锁
岳臻俊
分享资料个
描述
概述
我们都很懒惰。
有无数次我匆匆忙忙地冲出门去上课,结果迟到了 30 分钟——因为睡过头——而且忘记锁门了。我还可以解释一下,有几次我躺在沙发上时,零食堆积如山,有人来开门,导致我不得不从沙发上摔下来,走到门口,然后打开门锁。
不再。
解决方案是将光子连接到位于门锁前面的步进电机。
集会
在施工之前,需要为步进电机制造特定部件以连接到锁上。设计了两个对象来修改我们的门锁。
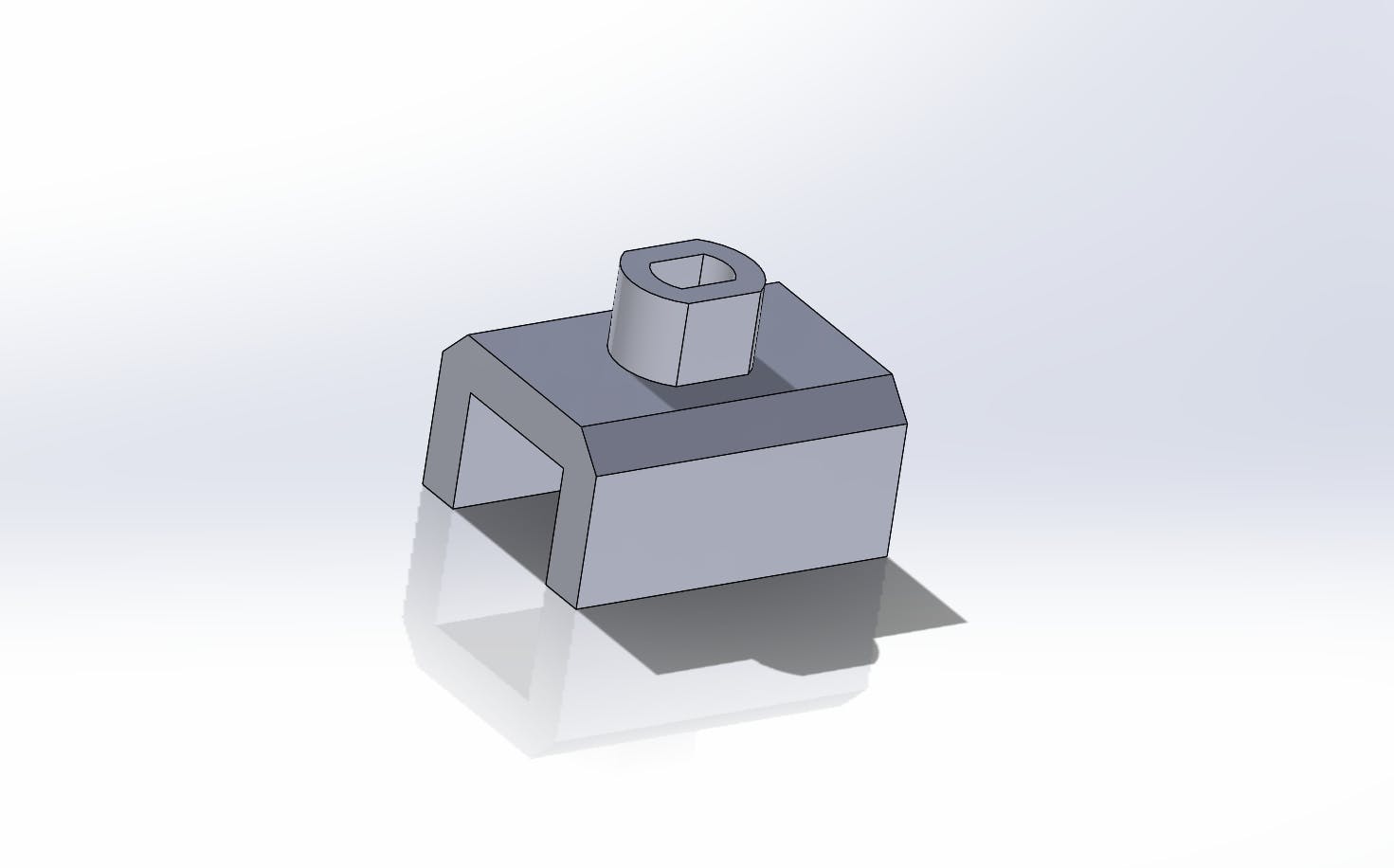
对象一是直接安装在步进电机轴上的附件。该部件设计为紧密配合,不需要像标准耦合器中那样的锁或固定螺钉。相对端有一个通用的形状,它环绕着锁的区域,刚好足以使其相对于步进电机旋转。
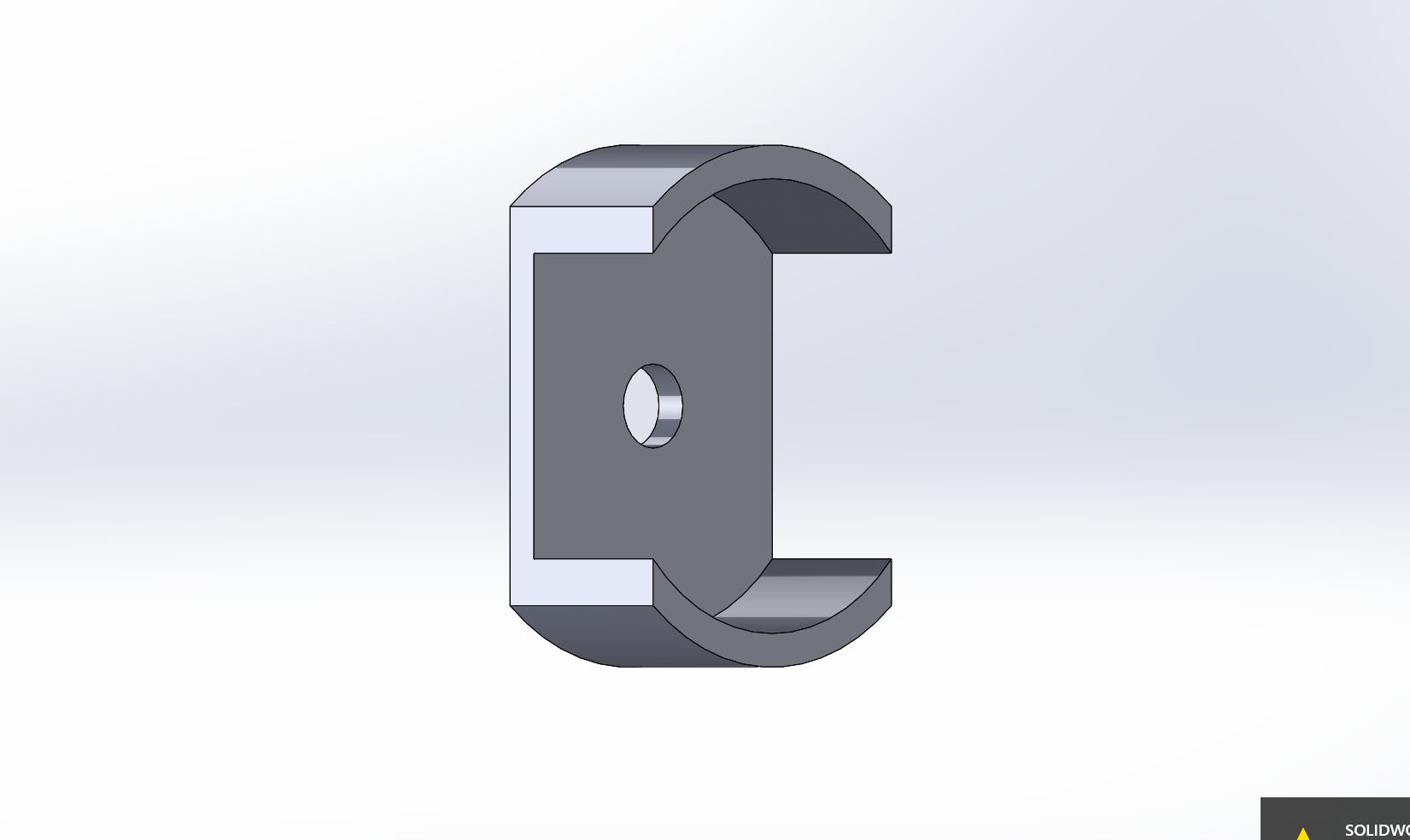
对象 2 是系统的主体(外壳)。这部分越过门锁并将步进电机接地。进行测量以设计零件以适合我们的大约 2.10 英寸的锁框。
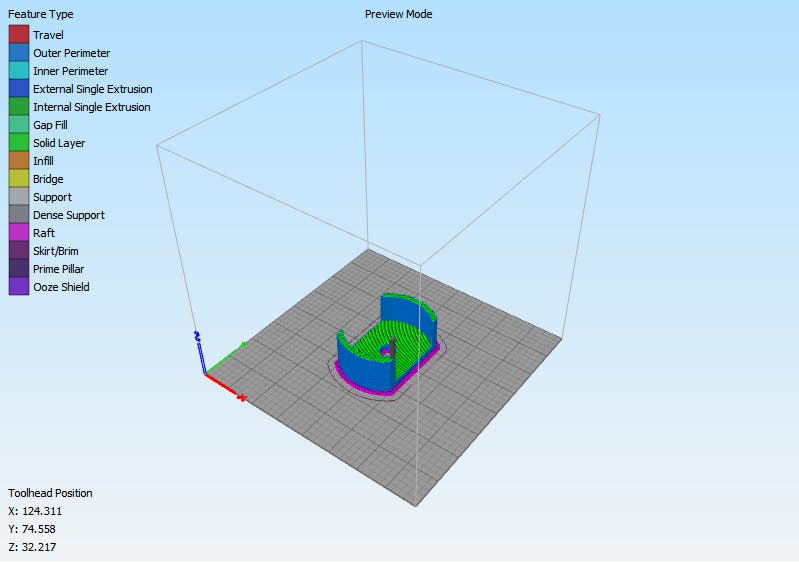
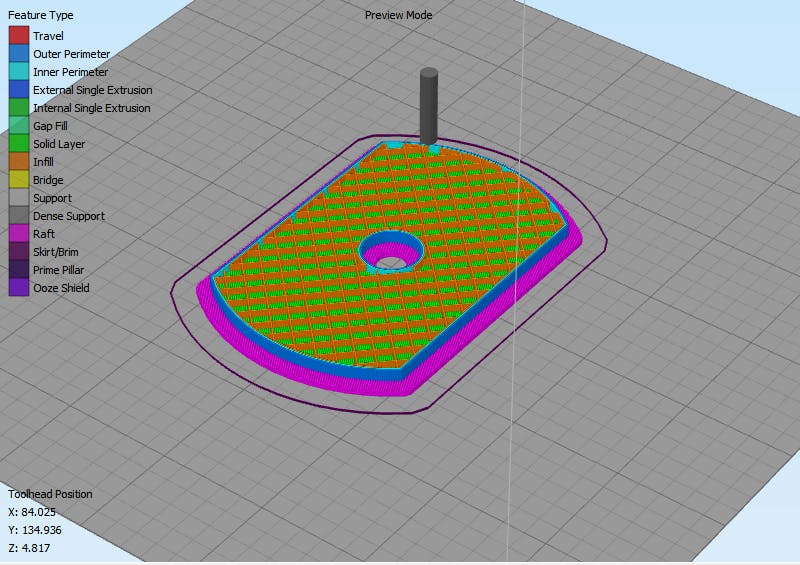
Simplify 3D 是用于打印此部分的切片软件,给定一个 .stl 文件。

怎么运行的
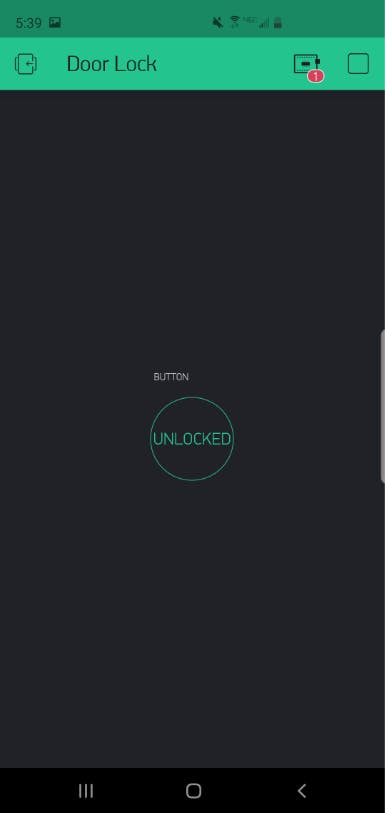
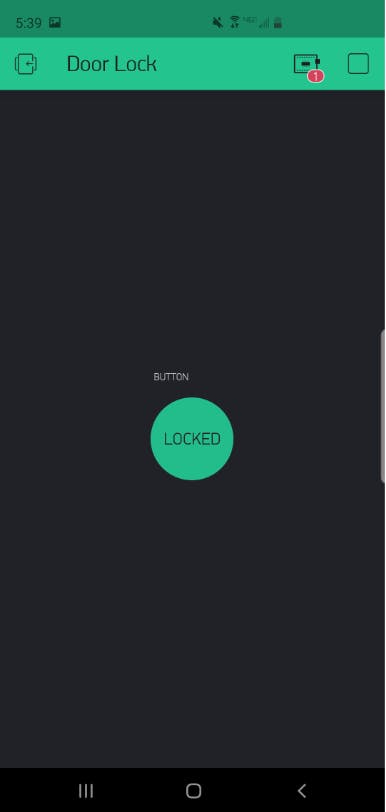
简单是我们项目的目标,这意味着我们的应用程序必须直观且易于使用。使用 Blynk,我们能够通过切换单个按钮来远程控制步进电机。这个设计只需要两个功能;锁定和解锁。
当按钮设置为“UNLOCKED”时,数字引脚 3 设置为 LOW,以验证门已解锁。如果门在激活按钮之前处于锁定状态,程序将运行一系列 IF 语句,直到锁沿逆时针方向旋转一定次数。
当按钮设置为“LOCKED”时,数字引脚 3 设置为 HIGH,以验证门已锁定。如果门在激活按钮之前处于锁定状态,程序将运行一系列 IF 语句,直到锁沿顺时针方向旋转一定次数。
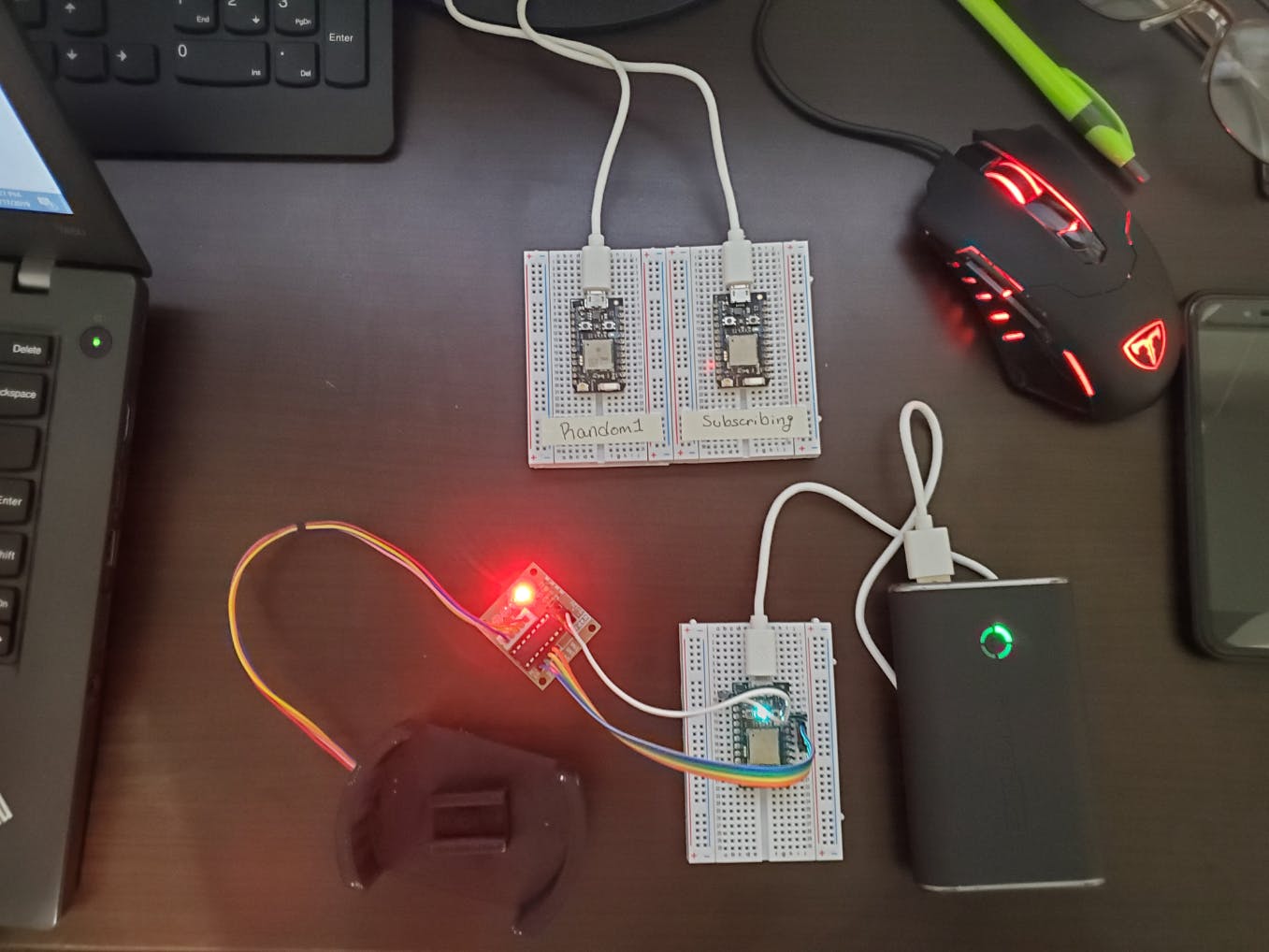
步进电机原理图的电路板如下所示。下图是连接到我们前门的设备。
通讯与制图
一旦锁定机制被用户手机上的 Blynk 应用程序触发旋转,粒子光子(1、2 和 3)就会相互通信。通信线路和响应列表:
当门被锁上时:
粒子 1 向粒子 2 发送通信。它打开 D7 LED。反过来,粒子 2 连接到粒子 1(将其最初打开的 LED 关闭 5 秒,然后重新打开)和粒子 3(将其原本关闭的 D7 LED 点亮)。然后,粒子 3 将通信返回到粒子 1 和2; 粒子 1 的 LED 灯闪烁 5 秒,然后重新亮起;Particle 2 关闭其现在打开的 LED。
此时,用于锁门的通信字符串已完成。
当门被解锁时:
采取类似的模式,但大多数情况下是相反的动作。Blynk 应用程序告诉电机转动并关闭粒子 1 上的 D7 LED。激活后,粒子 1 发送粒子 2 订阅的出版物。然后它打开其 D7 LED 并与 1 和 3 通信;粒子 1 将其 D7 LED 闪烁 5 秒,然后将其关闭;粒子 3 关闭其 D7 LED。Particle 3 然后发布一个事件。粒子 1 将其 D7 LED 闪烁 5 秒,然后在订阅时再次关闭;粒子 2 在订阅时关闭其 D7 LED。
这样就完成了用于开门的通信字符串。
第三个粒子同时持续向 ThingSpeak.com 发布数据。此图发布锁定和解锁数据与时间的关系。当门被锁定并且 D7 LED 亮起时,发布 1;当门解锁且 D7 LED 熄灭时,将发布 0。上面详述的通信字符串显示了 LED 亮起的方式和原因。时间戳包括数据和军事时间,让观众能够看到他们的门在一天中的什么时间被锁定或解锁。
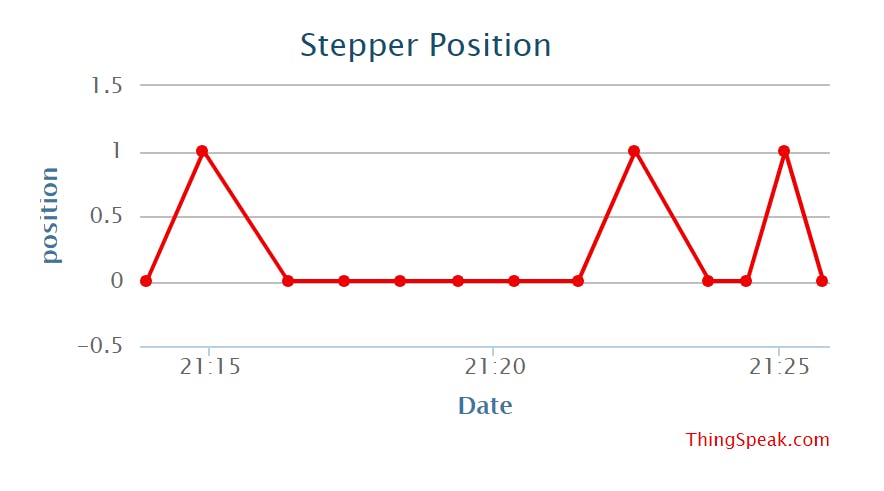
图形示例显示门从大约 21:16 到大约 21:21 保持解锁状态。然后门被短暂地锁上,然后又开了一分钟。它再次被锁定和解锁。
可以在这个网站上找到该图的连续更新版本。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章







