

Global SfM和ncremental SfM知识讲解
描述
3D视觉的核心问题是恢复场景结构、相机位姿、和相机参数,而解决方式有两种,一种是off-line的sfm(structure from motion),一种on-line的slam(simultaneous localization and mapping)。Slam 与sfm的区别在于,大多数slam系统是需要提前标定相机,而sfm 则不需要提前标定(通常所说的三维重建和slam的区别,严格意义上应该是sfm 和slam的区别)。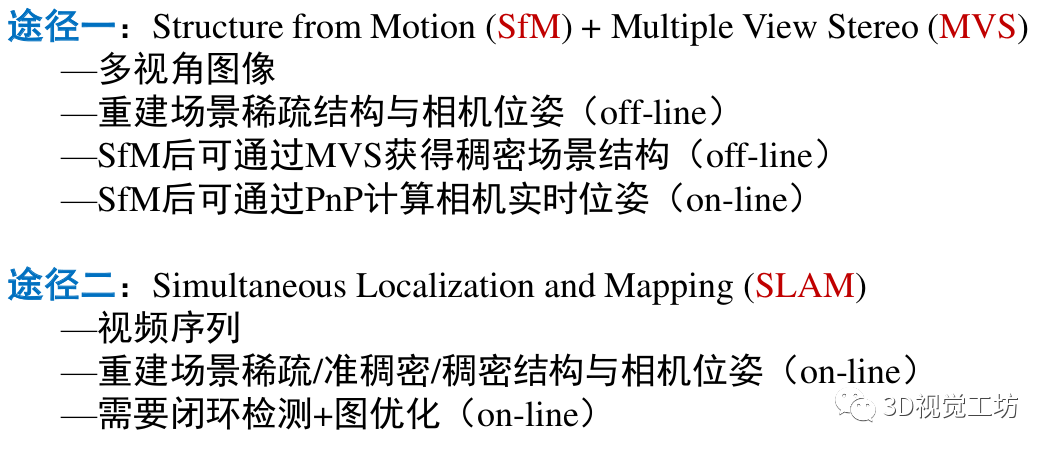
Sfm 可以分为以下几类:Global SfM、Incremental SfM、Hybrid SfM、Distributed SfM,这里主要讲解Global SfM和ncremental SfM(主要集中在global sfm)。
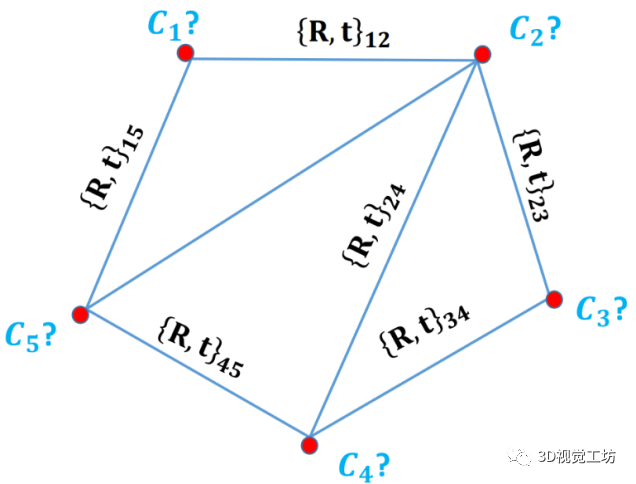
一、Global SfM workflow:
Global sfm 的内容包括rotation averaging 和anslation averaging。
Rotation averaging
观测值:一组相机pose的相对rotation
目标:计算相机的绝对旋转
优化:L2范数,采用L2范数的原因有两个:1)估计一个好的旋转初始值 2)收敛快
理论基础: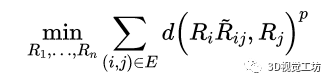
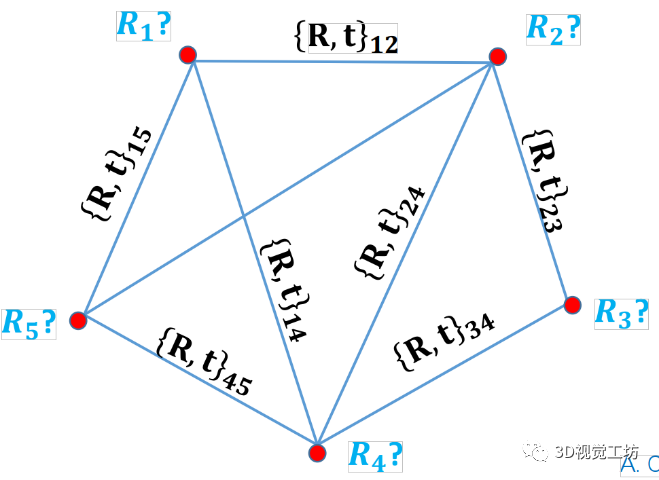
translation averaging
观测值:同rotation averaging 一样,观测值是两一组pose之间的相对translation
目标:计算相机的绝对旋转
优化:L1范数,原因是L1 范数对噪声鲁邦
理论基础: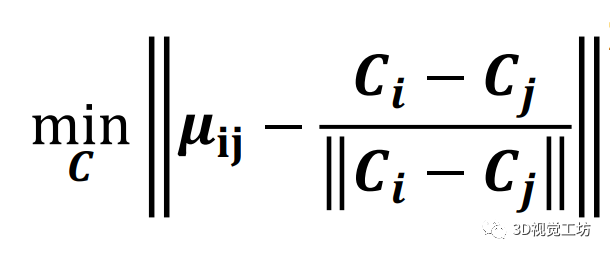
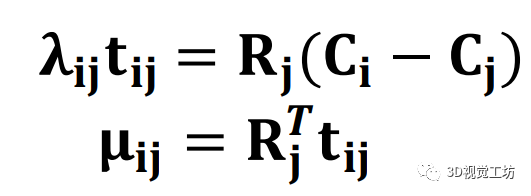
Translation averaging 在global sfm 中计算困难,原因如下:
1、 两视图之间的运动不能恢复尺度(tvec 是从本质矩阵中恢复出来的,但是本质矩阵的秩是5,不包含尺度,所以global sfm 是属于三焦张量问题,即是至少tack 3帧才能进行运算。同时,global sfm 容易出现退化现象,当相机都处于同一条线上时候,对于无人机图像来说,这个时候轨迹就会出现bending map。
解决bending map 的手段有三点:
(1)提前对相机标定
(2)以无人机为例,飞行航线不要在恒定高度上飞行
(3)融合其他传感器,如gps 位置约束等 退化的case 如下: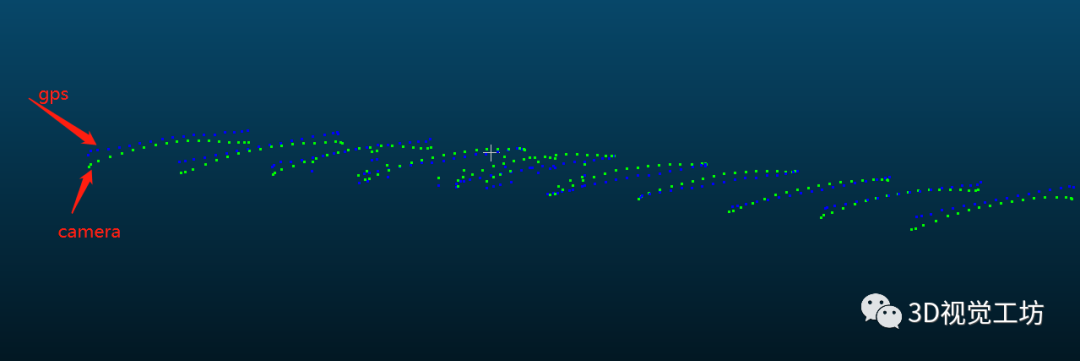
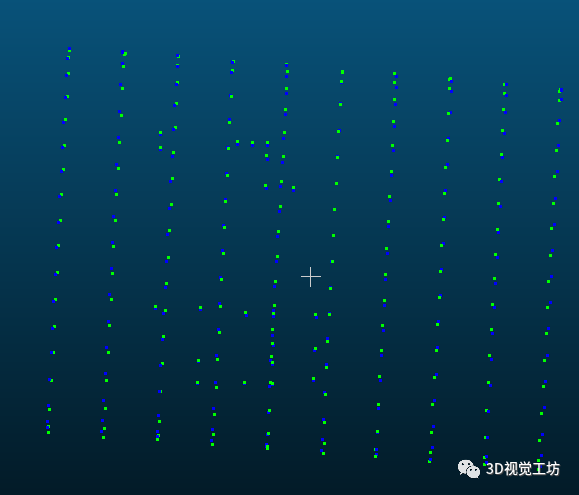
以上分别为侧面图和俯视图 以上结果是fusion low-cost gps的效果,但是依旧可以看出有弯曲的现象(不融合的效果特别差) 飞行方式改变,fusion low-cost gps,退化现象消失,如下: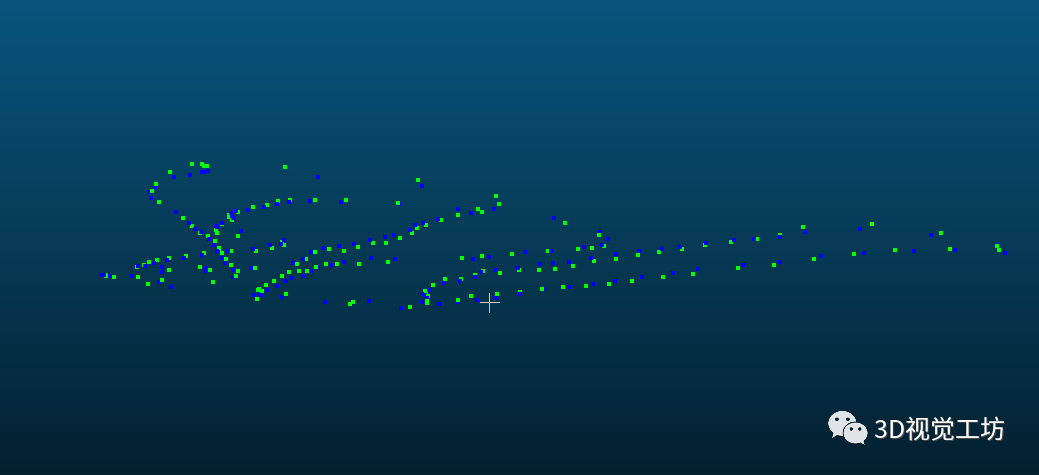
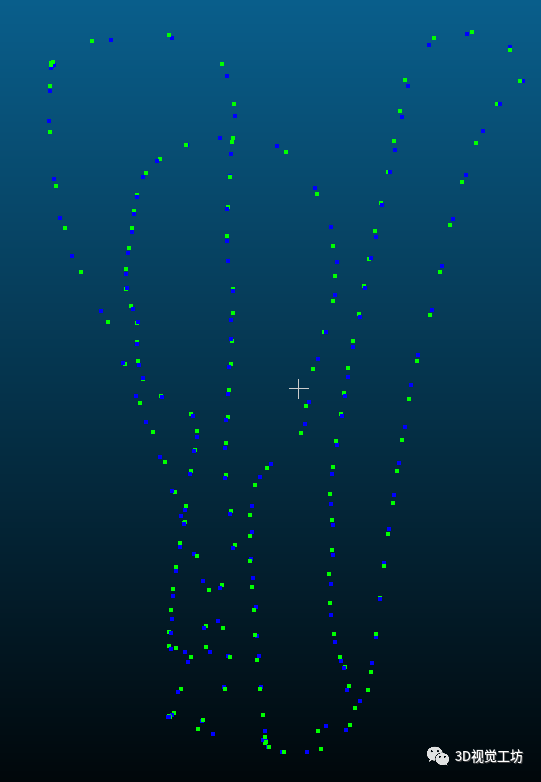
从侧面图和俯视图可以看出,当飞行方式发生改变,global sfm 退化现象消失。
2、 global sfm translation averaging第二个的痛点是对噪声敏感,其不像Incremental sfm,不断的ransac 和local ba 来减少bad EGs的影响。 如何去改善global sfm 的鲁棒性:
1)如果rotation 是已知的(不够精确),提供global rotation初始值给global sfm pipeline ,利用这些初始值在BA中增加relative rotation constraint
2)如果位置已知,sfm 增加位置约束,即最小化先验位置和估计的位置之间的gap,位置约束可以替代slam回环(如果是low cost gps ,位置约束不能保证精度,但可以起到一个control strcture 的作用(AR 常用)—参考vins-fusion思想 ,这个openmvg 中已经实现位置约束。
二、Incremental SfM workflow:
增量sfm这里不准备太多的叙述,需要注意的是初始化选择像对的基准:
enough matching
big baseline
三、global sfm和incremental sfm 优缺点和应用场景
应用场景:
1.当考虑速度不考虑精度的时候,并且当图像overlap 比较大的时候,用global sfm 可以达到理想效果,因为有更多的数据去average(Feature track based translation averaging)
2.如果考虑精度,选择Incremental sfm ,但是在大场景下,incremental sfm会随着图像的增多,速度越来越慢,同时由于误差的累计,会出现drfit ,这种情况下可以采用Distributed SfM。
审核编辑:刘清
-
贸泽电子开售Sensirion新款SFM3505高性能数字质量流量计2026-07-06 167
-
SFM3019数字式质量流量计:医疗通风应用的理想之选2026-06-18 229
-
SFM3000系列气体流量传感器选型指南2025-05-19 987
-
DTX-MFM2,GFM2,SFM2 用户手册2023-10-09 754
-
基于特征点的SfM在弱纹理场景下的表现2023-08-21 3791
-
为什么无法使用python从SFM10读取uart?2023-05-24 542
-
表面贴装超快速整流器SFM11-M-SFM18-M规格书2022-04-01 1018
-
适用于各种医疗和工业应用的Sensirion SFM3003/SFM3013流量计2022-02-24 3235
-
贸泽电子开售医疗用Sensirion SFM3003和SFM3013流量计2021-12-21 2934
-
一种激光雷达增强的SfM流程2021-01-07 3860
-
SFM-130-01-S-D-A和SFM-120-01-S-D-A申泰samtec进口连接器优势板对线型号2020-05-28 1354
-
助力医疗技术领域,盛思锐完善SFM3xxx气体流量计产品线2016-01-06 1966
-
求插孔式三端稳压块封装(SFM)2012-07-01 3600
-
SFM系列压电式蜂鸣器2009-09-19 2089
全部0条评论

快来发表一下你的评论吧 !
