

对雷达实施距离拖引干扰的过程是怎样的
描述
对雷达实施距离拖引干扰的过程如下:
1. 干扰脉冲捕获距离波门
载机收到雷达脉冲后,以最小的延迟通过诱饵转发一个干扰脉冲,干扰脉冲与目标回波脉冲几乎重合,但干扰脉冲信号幅度J大于目标回波脉冲信号幅度S,雷达的AGC电路将按干扰信号幅度调整电路的增益,保证雷达接收机的输出信号处在一定的动态范围以内。
这样保持一段时间,称为停拖,其目的是使干扰信号与目标信号同时处在距离波门上,使得干扰信号能够截获雷达的距离波门。停拖时间要求大于雷达接收机自动增益控制电路的惯性时间。
2. 距离波门拖引
当雷达距离波门可靠地跟踪到干扰脉冲后,诱饵干扰机在转发干扰脉冲时,逐步增加转发脉冲相对于回波脉冲的时间延迟,使得距离波门随干扰脉冲移动时,目标回波脉冲逐步离开到波门以外,直到距离波门的中心位置偏离目标位置若干个波门的宽度。距离拖引时要求拖引速度(诱饵脉冲的距离变化率)小于雷达跟踪系统的最大速度指标。
3. 干扰机关机
用干扰脉冲将距离波门从目标脉冲处拖开足够大的距离以后,关闭干扰机,这时制导雷达距离波门内既无目标回波也无干扰脉冲,即目标丢失,此时雷达系统的距离波门重新转入搜索状态。
如果雷达重新搜索到目标,则干扰机可以重复上述过程,继续实施拖引干扰。对于雷达而言,弹目之间的交会时间很短,尤其是在近距离情况下,目标丢失后,来不及重新搜索和捕获目标,会造成导弹的脱靶。
RGPO模型算法
下面对RGPO的模型算法进行分析。距离波门拖引(匀速拖引)干扰中假目标的距离函数可以表示为: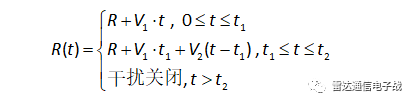
在距离波门拖引过程中,为了保证距离跟踪的持续性,起始拖引假目标与目标回波时延要求很小,雷达处理后的跟踪航迹才能够逐渐地偏离真实目标舰船,否则雷达将无法丢失对真实目标的跟踪。 对采用线性调频体制的雷达移频拖引干扰实现过程进行分析。LFM信号是一种典型的脉冲压缩信号,它通过非线性相位调制来获得大时宽带宽积。采用这种信号的雷达能够同时获得远的作用距离和高的分辨率。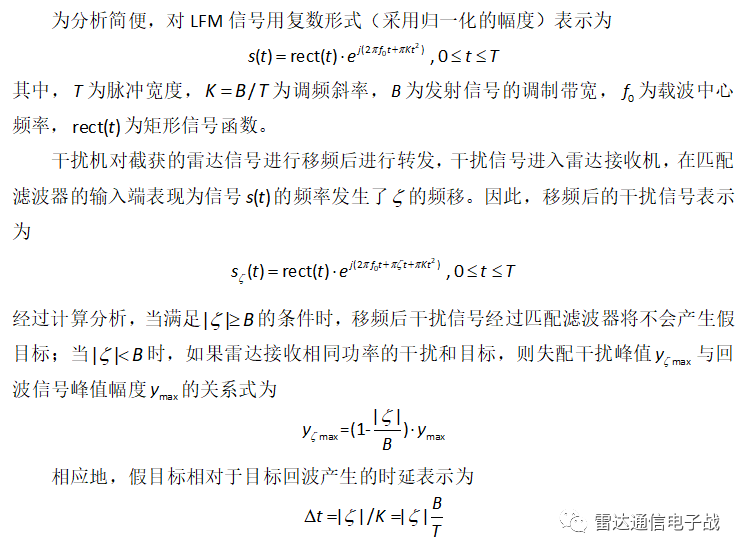
根据LFM信号时延与频移之间的关系式,有源干扰时通过对截获的雷达发射信号调制一个附加的频率后转发给雷达,就可以使雷达产生一个假目标,假目标或领先于匹配目标,或者滞后于匹配目标,取决于给定移频量的正值或是负值。
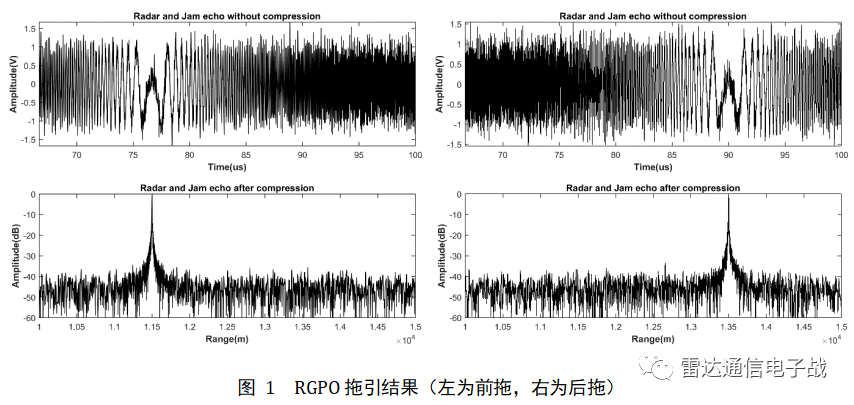
根据雷达脉冲到达时间(TOA)对移频量进行调整,可以使得假目标不断地偏移目标回波,从而形成距离波门干扰。
当移频量为负值时,将产生距离波门后拖干扰;当移频量为正值时,将产生距离波门前拖干扰。
对于自卫式干扰,R,V取值均为0,为拖引开始时间,在实际建模过程中可将其设置为0,则匀速拖引时拖引期假目标拖引距离表示为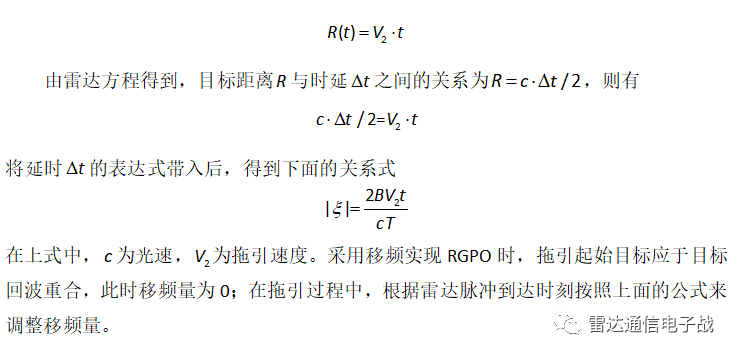
审核编辑:刘清
-
倒车雷达有干扰,请教原因2017-05-12 12682
-
基于TI产品的短距离雷达参考设计2018-09-25 1599
-
怎么提高雷达的抗干扰能力?2019-08-14 5185
-
冲激雷达接收的随机射频干扰问题怎么解决?2019-08-21 1934
-
车载超声波雷达距离处理过程2020-03-09 3577
-
倒车雷达的报警距离2010-01-04 8571
-
干扰对脉压雷达影响的仿真与分析2011-07-05 868
-
信号干扰危及汽车雷达安全2022-07-15 2039
-
使用远距离支援干扰系统对制导导弹干扰的机理分析2023-03-06 2646
-
最简雷达距离方程与应用2023-04-26 3468
-
雷达的干扰可分为?雷达干扰的基础知识2023-07-25 6783
-
定华雷达知识讲堂:雷达物位计在测量过程中的干扰有哪些?2024-06-26 1233
-
定华雷达仪表学堂:雷达物位计在测量过程中出现几种干扰源2024-10-14 1327
全部0条评论

快来发表一下你的评论吧 !
