

工业机器人基本构成及分类
机器人
描述
工业机器人是面向工业领域的多关节机械手或多自由度的机器人。工业机器人代替人类完成生产是未来制造业重要的发展趋势,是实现智能制造的基础,也是未来实现工业自动化、数字化、智能化的保障。生产加工环境恶劣、人口老龄化带来劳动力紧缺、人工培训成本高等现状,推动着工业机器人需求增长。
工业机器人基本组成
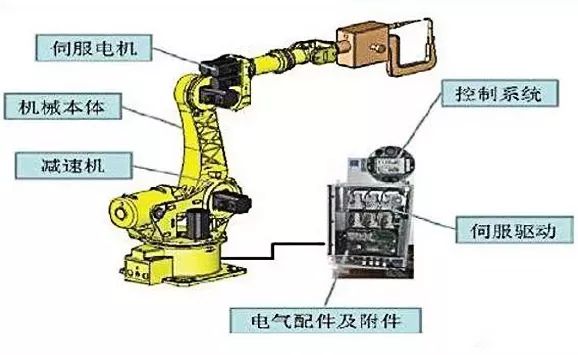
工业机器人由主体、驱动系统、控制系统三个基本部分组成。
主体:即机座和执行机构,包括臂部、腕部和手部,有的机器人还有行走机构。手腕部分又称为末端外部工具接口,其上可安装夹持器、工具、传感器等。
驱动系统:包括动力装置和传动机构,用以使执行机构产生相应的动作。
控制系统:按照输入的程序对驱动系统和执行机构发出指令信号,控制工业机器人按照要求动作。
工业机器人分类
按关节坐标形式分类
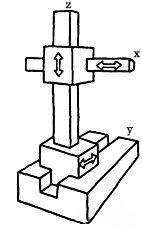
直角坐标机器人(PPP)
直角坐标型机器人又称单轴机械手,其末端执行器(手部)空间位置的改变是通过三个互相垂直的坐标x、y、z轴的移动来实现的。
圆柱坐标机器人(RPP)
机器人末端执行器空间位置的改变是由两个移动坐标和一个旋转坐标实现的。
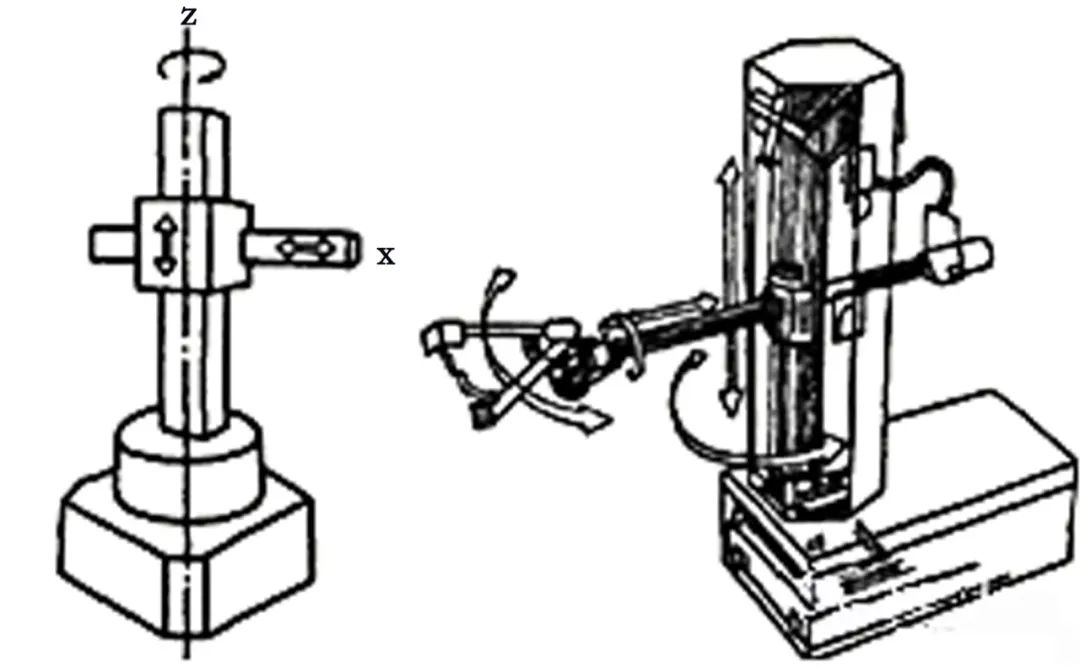
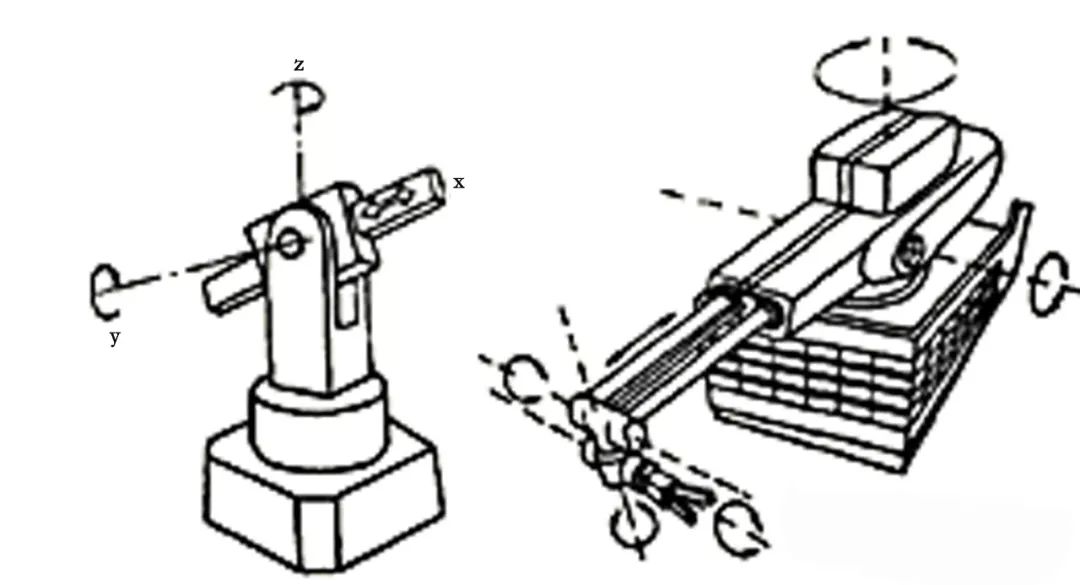
球坐标机器人(RRP)
又称极坐标式,机器人手臂的运动由一个直线运动和二个转动组成,即沿x轴的伸缩,绕y轴的俯仰和绕z轴的回转。
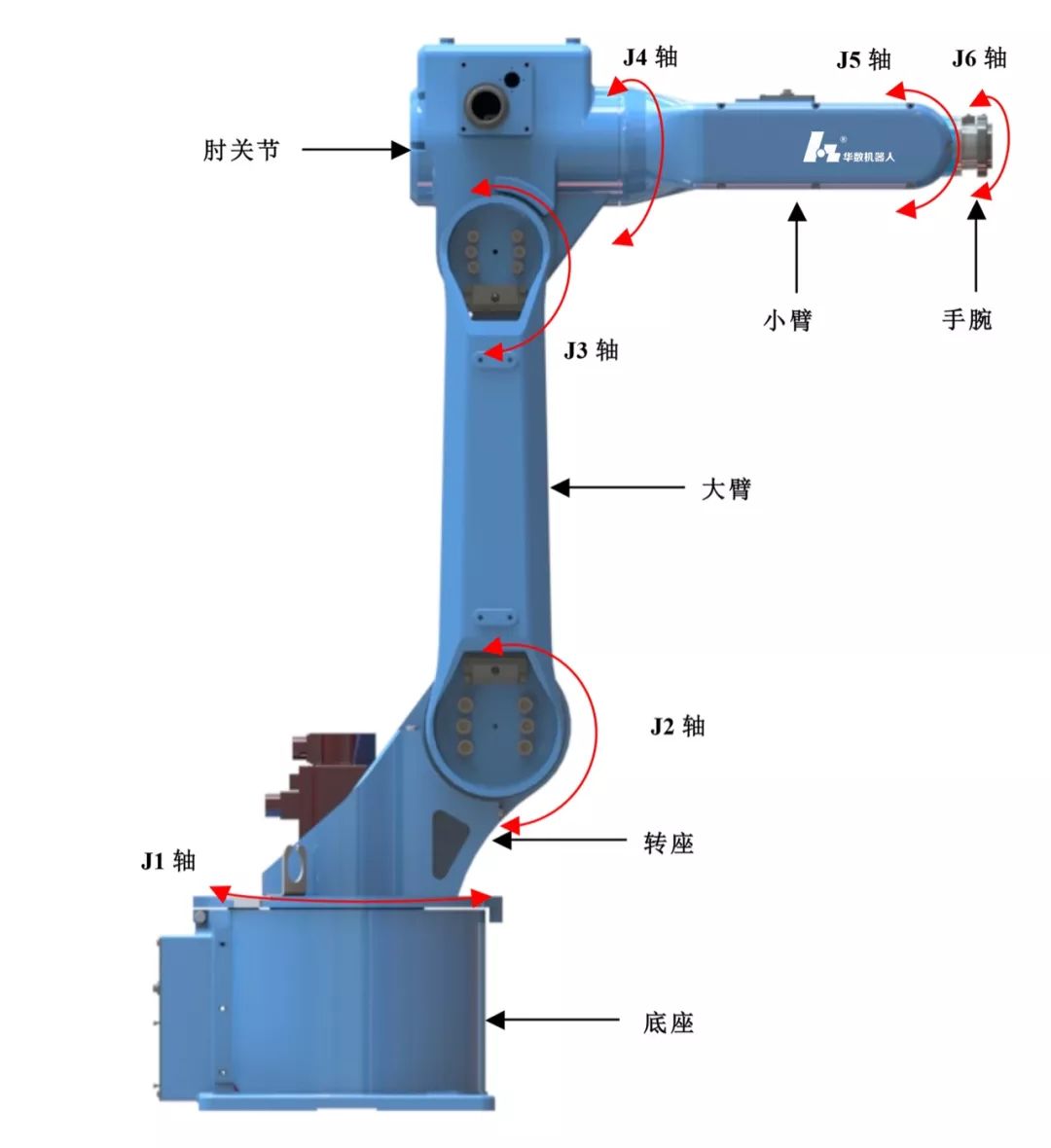
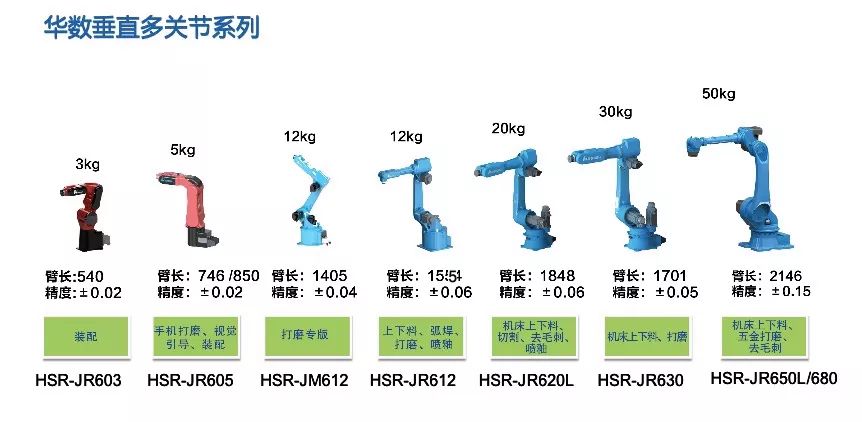
关节机器人(RRR)
又称关节手臂机器人或关节机械手臂,适用于诸多工业领域的自动化作业,如自动装配、喷漆、搬运、焊接等工作。分为垂直关节机器人和平面(水平)关节机器人。
此外,还可按照关节机器人的工作性质分类,如搬运机器人、码垛机器人、焊接机器人、喷漆机器人、激光切割机器人等。
按机器人轴数分类
传统六关节
六轴机器人具有6个串联旋转关节,传统六关节机器人分为通用型六关节机器人和专用型六关节机器人。

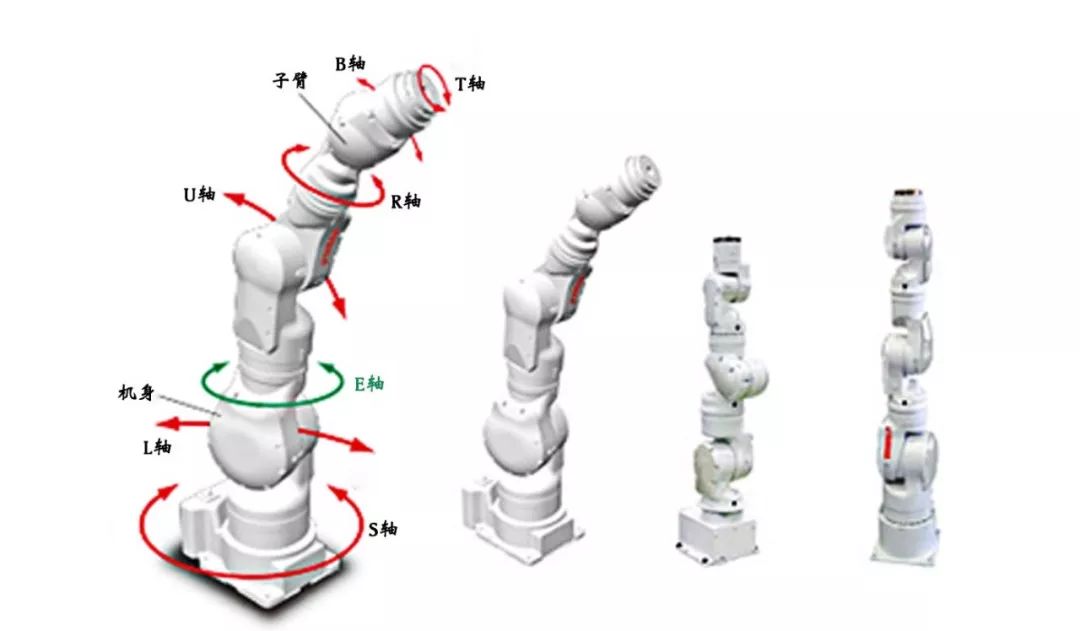
七轴机器人
又称为冗余度机器人。相比六轴机器人,额外的轴允许机器人躲避某些特定的目标,便于末端执行器到达特定的位置,更加灵活的适应某些特殊工作环境。
协作机器人
简称cobot或co-robot,是能够安全地与人类进行直接交互/接触的机器人。协作机器人可以把机器人的精确和重复性能和人类独特的技巧与能力结合起来,人类擅长解决不精确和模糊的问题,机器人则在精度、力量和耐久性上占优势。

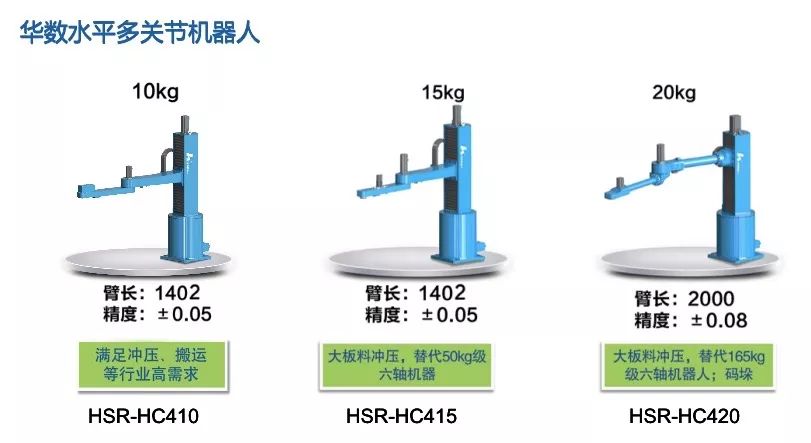
四轴/SCARA机器人
四轴机器人是指“选择性装配关节机器臂”,四轴机器人的手臂部分可以在一个几何平面内自由移动,即X、Y、Z方向的平动自由度和绕Z轴方向的转动自由度。

Delta并联机器人
Delta机器人属于高速、轻载的并联机器人,一般通过示教编程或视觉系统捕捉目标物体,由三个并联的伺服轴确定抓具中心(TCP)的空间位置,实现目标物体的运输,加工等操作。

按控制系统分类
按有无反馈分类
分为开环控制、闭环控制
按期望控制量分类
分为力控制、位置控制、混合控制
力控制分为:直接力控制、阻抗控制、力位混合控制
位置控制分为:单关节位置控制(位置反馈 、位置速度反馈、位置速度加速度反馈),多关节位置控制(分解运动控制、集中控制)
按智能化的控制
分为模糊控制、自适应控制、最优控制、神经网络控制、模糊神经网络控制 、专家控制
审核编辑:汤梓红
-
工业机器人的构成、分类、工作原理2023-04-20 2372
-
关于工业机器人的构成和分类2023-03-24 1689
-
工业机器人的构成与分类2023-02-02 3106
-
PDF——工业机器人技术及应用2022-10-16 27520
-
浅谈工业机器人构成、分类、工作原理2022-09-27 2813
-
工业机器人的构成和分类2022-07-07 3573
-
机器人的定义是什么?工业机器人的应用有哪些?2021-07-05 5457
-
工业机器人的构成_工业机器人的分类2020-03-28 6716
-
工业机器人的分类2018-12-24 42136
-
工业机器人的技术原理2018-11-23 5101
-
《工业机器人》,蒋刚编著的,附下载。2016-06-01 40294
-
如何系统性地学习工业机器人技术?2016-03-06 3499
-
什么是工业机器人2015-01-19 6815
全部0条评论

快来发表一下你的评论吧 !
