

AUTOSAR自适应平台标准化软件框架介绍
电子说
描述
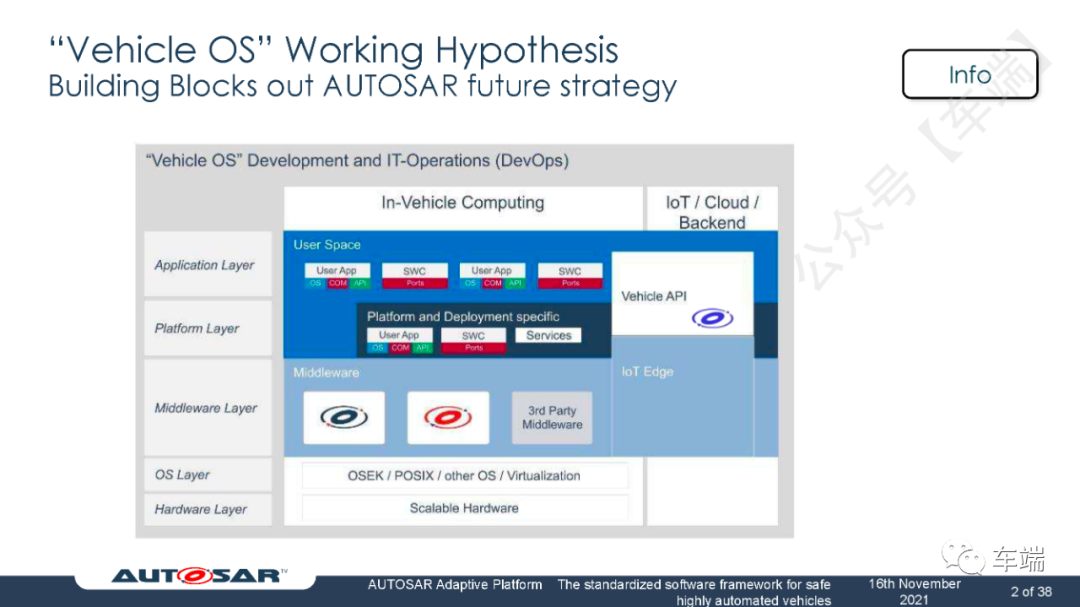
“车辆操作系统”工作假设
AUTOSAR 自适应平台安全要求
-[RS_SAF_00001] 混合关键性 -[RS_SAF_00002] 正确的配置 -[RS_SAF_00003] 正确的更新和升级 -[RS_SAF_00004] 安全通信 -[RS_SAF_00005] 故障和故障
功能要求
-[RS_SAF_10001] 安全初始化 -[RS_SAF_10002] 安全验证 -[RS_SAF_10005] 安全关机和终止 -[RS_SAF_10006] 状态的安全转换 -[RS_SAF_10008] 资源管理 -[RS_SAF_10014] 安全通信 -[RS_SAF_10027] 防止配置丢失 -[RS_SAF_10028] 可靠的调度 -[RS_SAF_10030] 安全程序执行 -[RS_SAF_10031] 检测时间违规 -[RS_SAF_10037] 无意的迭代 -[RS_SAF_10038] 安全更新/升级状态
技术要求
-[RS_SAF_21101] PHM 应继承上一个最高安全完整性级别 -[RS_SAF_ 21102] PHM:国家监督和看门狗触发器 -[RS_SAF_XXXX] 执行管理。-[RS_SAF_XXXX] 国家管理。-[RS_SAF_XXXX] 资源管理... -[RS_SAF_XXXX] 操作系统... -[RS_SAF_XXXX] 持久性... -[RS_SAF_XXXX] 通信管理。-[RS_SAF_XXXX] 更新和配置管理。-...
基于POSIX的安全操作系统的障碍
基于 POSIX 的操作系统
-中间件供应商锁定 -平台设计重叠 -虚拟机管理程序架构讨论 -调整内存管理
供应商和 AUTOSAR 标准 - 编程语言功能-..
安全的开源Linux发行版
-缺少流程管理 -缺少需求和架构设计 -开发后验证和确认 -安全内存管理 -对软件项目管理充满信心 -发生故障时的责任 -编程语言功能 -..
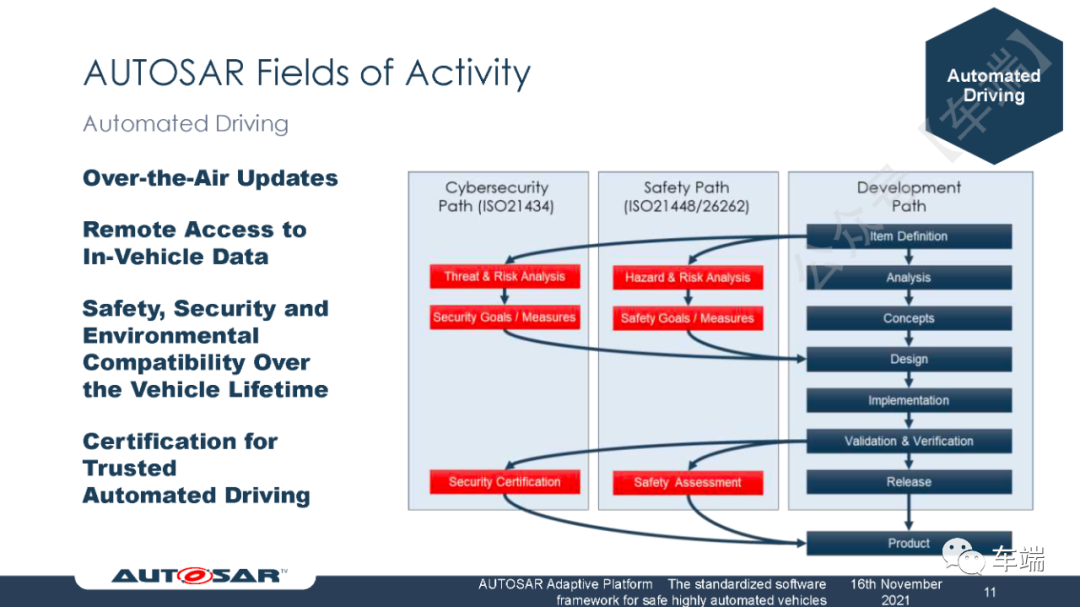
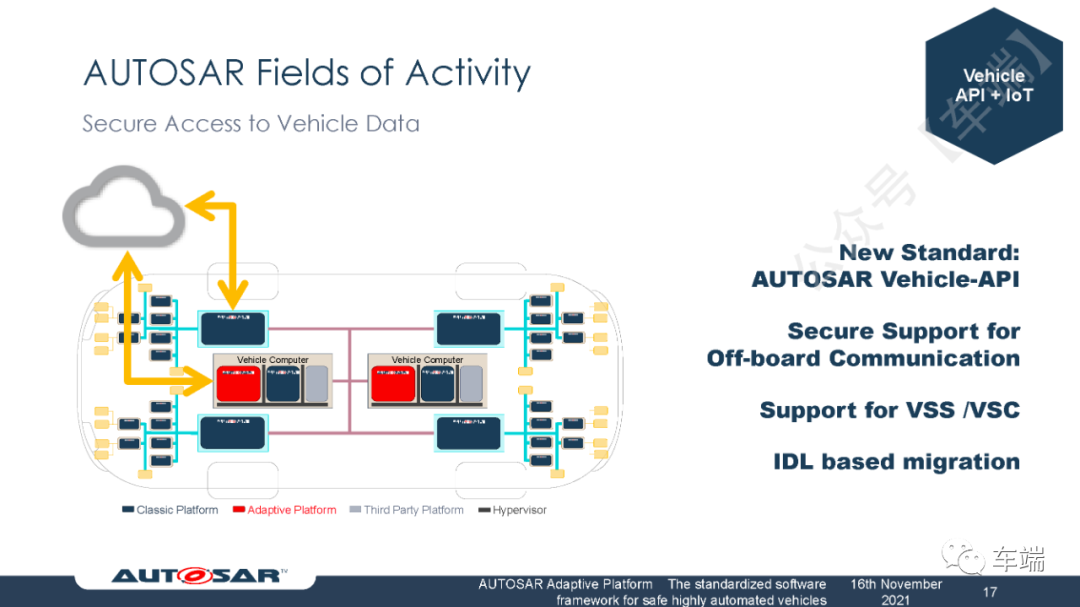
无线更新
远程访问车载数据
车辆整个生命周期内的安全性、安保和环境兼容性
可信自动驾驶认证
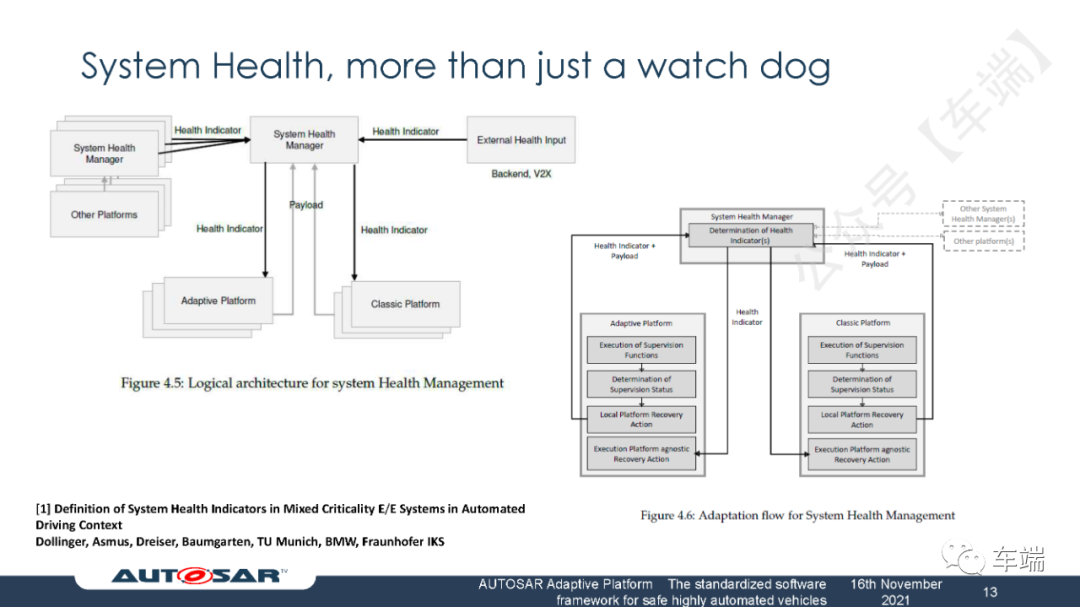
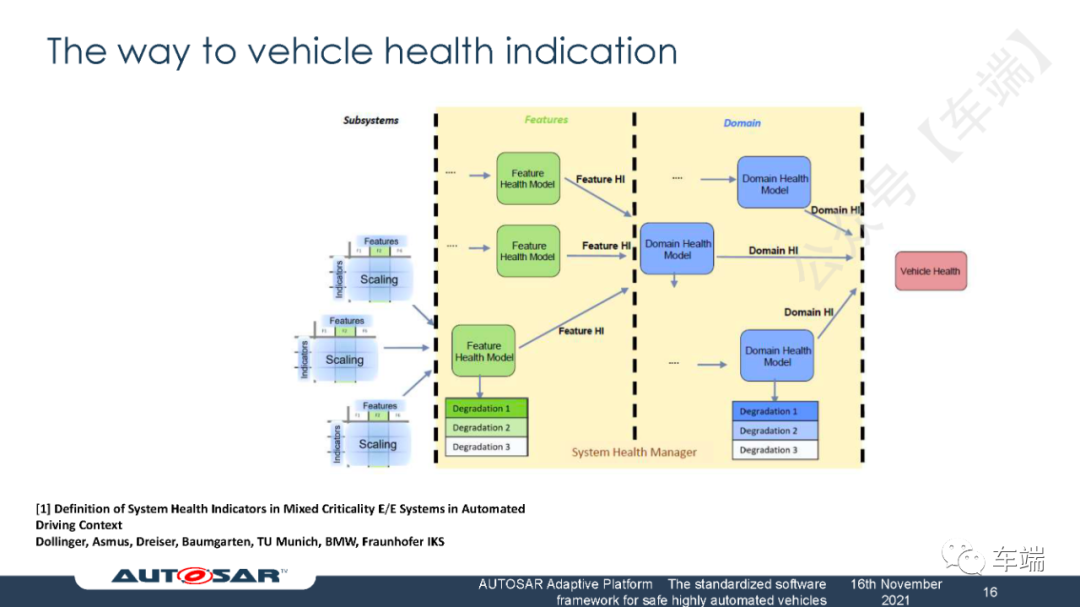
系统运行状况,不仅仅是看门狗
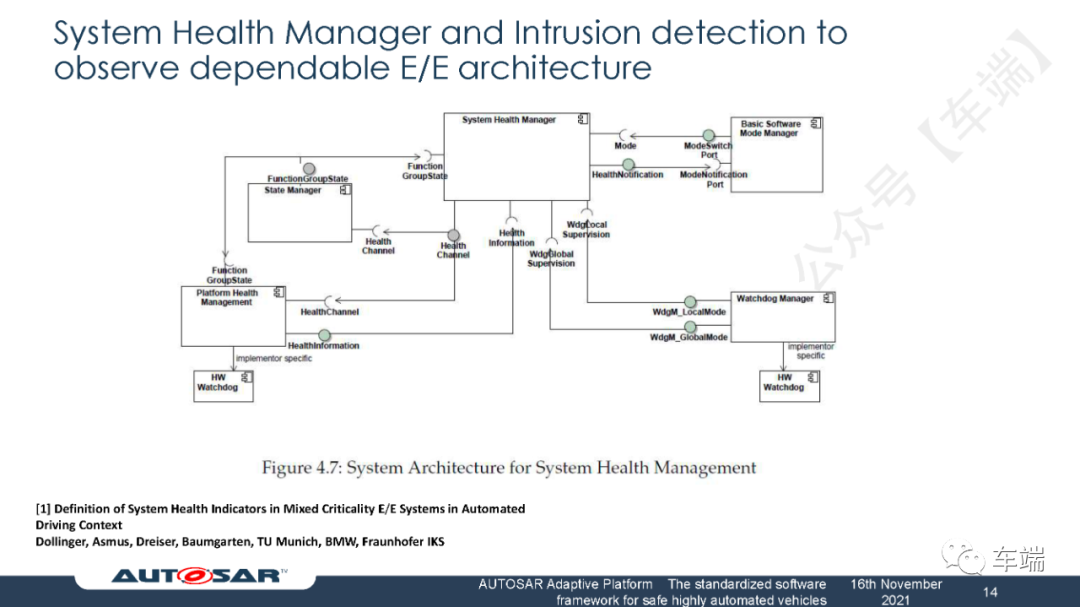
系统健康管理器和入侵检测,以观察可靠的 E/E 架构
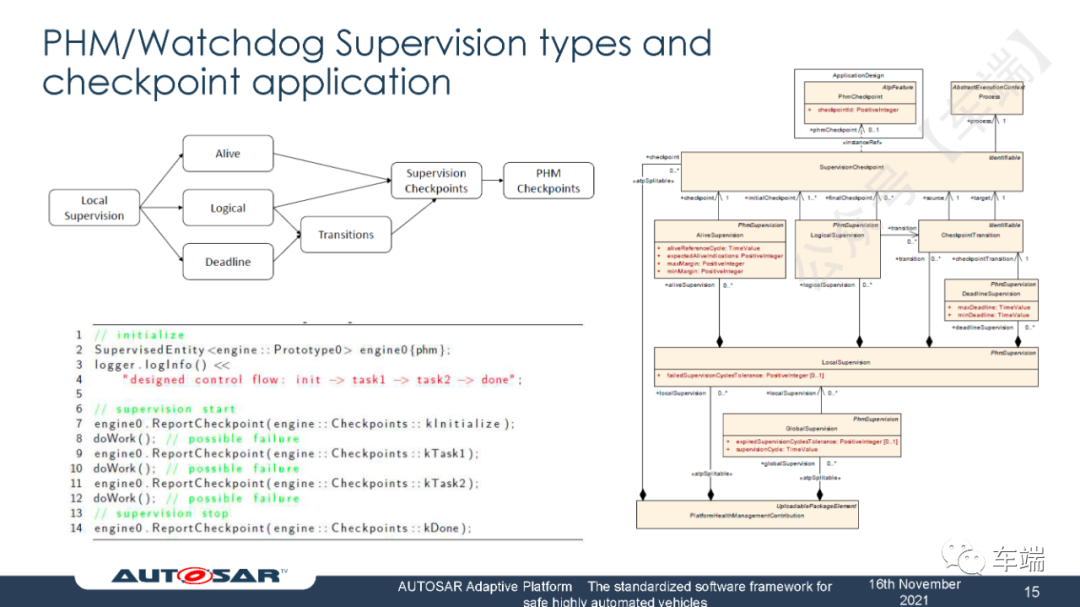
PHM/看门狗监督类型和检查点应用程序
详情请关注公众号【车端】
审核编辑:刘清
-
AUTOSAR通信组件介绍 AUTOSAR通信层功能分析2024-12-17 2721
-
AUTOSAR架构自适应平台2023-10-27 2469
-
AP AUTOSAR是如何定义和管理自适应应用程序的呢?2023-09-22 5954
-
介绍一下AUTOSAR各个软件层之间交互的接口2023-07-08 6835
-
Elektrobit 为新一代 EB corbos Starter Kit 添加基于 AUTOSAR 自适应平台的 OTA 更新功能2023-01-31 1426
-
为什么选择自适应AUTOSAR平台?2022-11-14 1999
-
在rockchip平台怎样去实现一套兼容多款wifi模块的自适应框架呢2022-03-07 3413
-
AUTOSAR基础软件层是由哪些部分组成的2022-02-17 1480
-
AUTOSAR分层模型及标准化的应用接口有哪些2021-12-24 1711
-
时间同步Autosar就是让ECUs的软件架构标准化2021-09-03 1904
-
Autosar软件开发技术概述2018-12-26 6260
-
AISINS将对AUTOSAR解决方案进行标准化处理2015-05-06 1863
-
EPON标准化进展2010-04-24 2258
全部0条评论

快来发表一下你的评论吧 !
