

时钟失效之后,STM32还能运行?
描述
问题:
该问题由某客户提出,发生在 STM32F103VDT6 器件上。据其工程师讲述:在其产品的设计中,STM32 的 HSE 外接 8MHz 的晶体产生振荡,然后通过 STM32 内部的PLL 倍频到 72MHz,作为 STM32 的系统时钟,驱动芯片工作。在 STM32 片外有专用的看门狗芯片,监控 STM32 的运行。STM32 内部的软件会在 STM32 的某个管脚上产生脉冲来复位看门狗。一旦 STM32 没有及时的产生脉冲来复位门狗,则看门狗会认为 STM32 运行不正常,从而复位 STM32。在对该产品做可靠性测试时,进行了对看门狗监控时钟失效能力的测试。测试的方法是:将 HSE 外接的晶体的两个端子接地,使其停止振荡,从而验证看门狗能否做出对 STM32 的做出复位动作。试验结果表明,看门狗没有产生复位动作。进一步测试发现,STM32 在失效情况下仍在向看门狗发送复位脉冲。
调研:
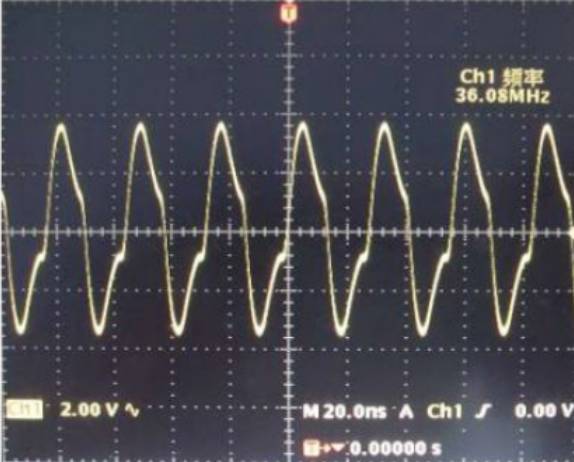
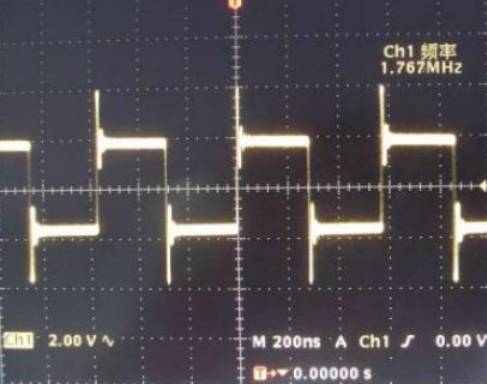
重复测试,确认其所述现象属实。检查软件代码,确认其软件没有开启 STM32 的 CSS功能。修改代码,将 PLL 的二分频从 STM32 的 MCO 管脚送出,以方便用示波器观察。通过控制晶体的管脚是否接地来控制 HSE 是否振荡。当 HSE 正常振荡时,MCO 送出的信号频率为 36MHz,当 HSE 停止振荡时,MCO 送出的信号的频率在 1.7MHz 附近,如图(一)所示:
通过调试器观察寄存器 RCC_CFGR 中的 SWS 控制控制位,其值为[10],说明此时的系统时钟确实来自 PLL 的输出。
从 STM32F103VD 的数据手册中查找 PLL 相关的参数如表(一):
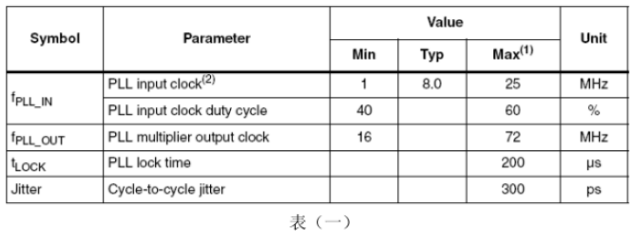
其中,PLL 的输出频率范围是 16MHz – 72MHz。也就是说,PLL 在处于相位锁定的状态下,可以输出 16MHz – 72MHz 的时钟信号。而当输入信号频率过低而导致输出信号频率低于 16MHz 时,将可能处于失锁的状态。在这状态下,它的输出信号的频率与输入信号的频率之间,不一定符合所设定的倍频与分频关系。更确切的说,不能通过公式:

得出“输入信号频率为零时,输出信号频率也为零”这样的结论。这一点与实测的结果相吻合。
结论:
STM32 的 PLL 在没有输入信号的情况下,仍能维持在最低的频点处振荡,产生输出。以至,CPU 及其它外设仍能在 PLL 送出的时钟的驱动下运行。所以,通过判断有无时钟来驱动 CPU 执行指令的方式来判断 HSE 是否失效是行不通的。
处理:
对软件做如下修改:
1. 在软件的初始化部分,开启 STM32 的 CSS 功能;
2. 修改 NMI 中断服务程序,加入 while(1) 陷阱语句;
开启 CSS 功能后,当 HSE 失效时,STM32 会自动开启 HSI,并将系统时钟的来源切换到HSI 的输出,同时产生 NMI 中断。这样,程序的流程将停留在 NMI 中而不能产生复位片外的看门狗的脉冲。当片外看门狗溢出后,就会复位 STM32,使其恢复到正常驻的状。
建议:
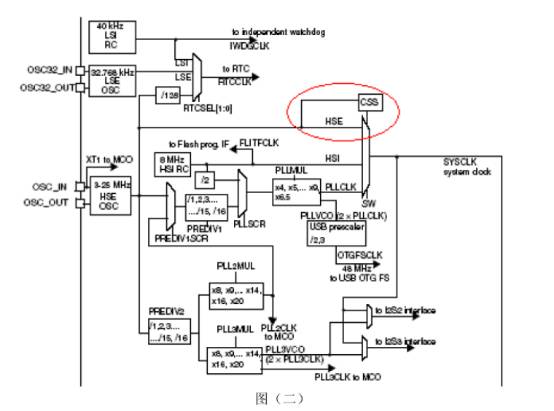
STM32 中的 CSS 功能是专门为检测和处理 HSE 失效而设计的。但该功能在 STM32 复位后是被禁止的,须要软件对其使能才会发挥作用。当 CSS 单元检测到 HSE 失效时,它会使能 HSI,并将系统时钟切换到 HSI。同时,它会关闭 HSE,如果 PLL 的输入信号来自 HSE的输出,它也会关闭 PLL。CSS 单元在做时钟调整的同时,也会产生一个 NMI 中断请求,和一个送给高级定时器的刹车信号。NMI 中断请求会产生一个 NMI 中断,以便用户程序可以在中断服务程序中做紧急处理,而刹车信号则是使高级定时器进入刹车状态,以防止由其控制的电机驱动桥臂由于失去控制而过流。用户程序可以在 NMI 中断服务程序中尝试恢复 HSE 及 PLL 的功能,也可以使用陷阱让程序的流程停留在服务程序中,从而等待看门狗复位整个系统。
审核编辑:汤梓红
-
晶振损坏了,STM32还能正常运行?2023-09-21 1743
-
STM32MP135裸机开发程序掉电之后还能运行吗?2024-03-11 350
-
CW32x030时钟运行的失效检测2025-11-27 158
-
CW32时钟运行中失效检测的流程是什么?CW32时钟运行中失效检测注意事项有哪些呢?2025-12-10 197
-
CW32F030时钟运行的失效检测功能2026-01-13 158
-
RCC系统时钟的stm32例程2015-12-07 664
-
为什么时钟失效后CPU还在运行?2017-08-29 7649
-
STM32F10x常见的应用讲解分析概述2019-10-25 1023
-
STM32F10x单片机的常见应用分析2020-12-10 1175
-
时钟失效后STM32还能运行是什么情况2021-10-29 3847
-
STM32移植到GD32,将内部时钟切换为外部时钟后无法运行的问题分析2021-12-02 2131
-
STM32学习笔记--时钟系统2021-12-05 933
-
STM32CubeMX | 基于STM32使用HAL库驱动RTC时钟及闹钟功能2021-12-06 1990
-
STM32入门系列-STM32时钟系统,STM32时钟树2022-01-17 989
-
时钟失效之后,STM32还能运行?2022-02-08 585
全部0条评论

快来发表一下你的评论吧 !
