

一种具有机械门控电子通道的机器人皮肤(R-skin)
描述
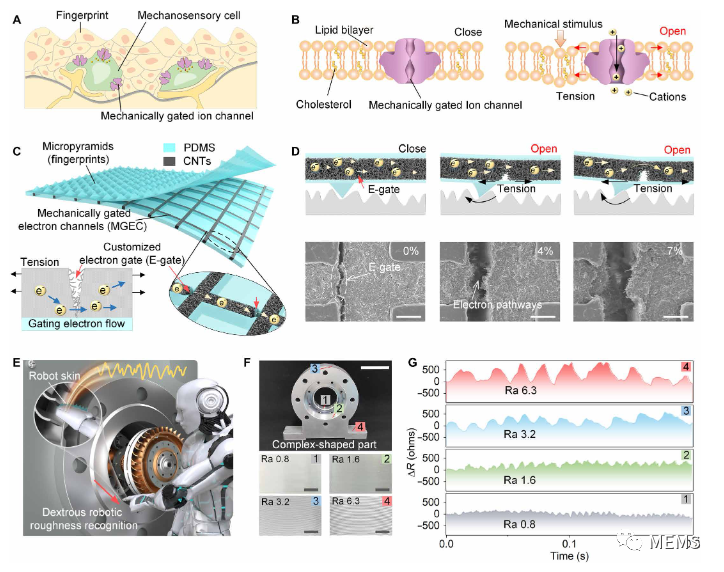
类似人类的触觉对于提升机器人智能至关重要。然而,再现人类皮肤的切向“滑动”感知仍在研究中。
近日,西安交通大学邵金友教授、Xiaoliang Chen受机械感觉细胞的侧向门控机械感觉机制(通过侧向张力诱导离子通道的开闭来感知机械刺激)的启发,报道了一种具有机械门控电子通道的机器人皮肤(R-skin),通过金字塔人工指纹触发的电子门(E-gates,即嵌入网状电子通道内的定制V形裂缝)的开闭来实现超灵敏和快速响应的滑动触觉感知。
文章要点
1)通过模仿细胞膜来调节膜力学,局部应变在E-gate处被增强以有效地调节电子路径以获得高灵敏度,而在其他位置被削弱以抑制随机裂缝以获得鲁棒的稳定性。
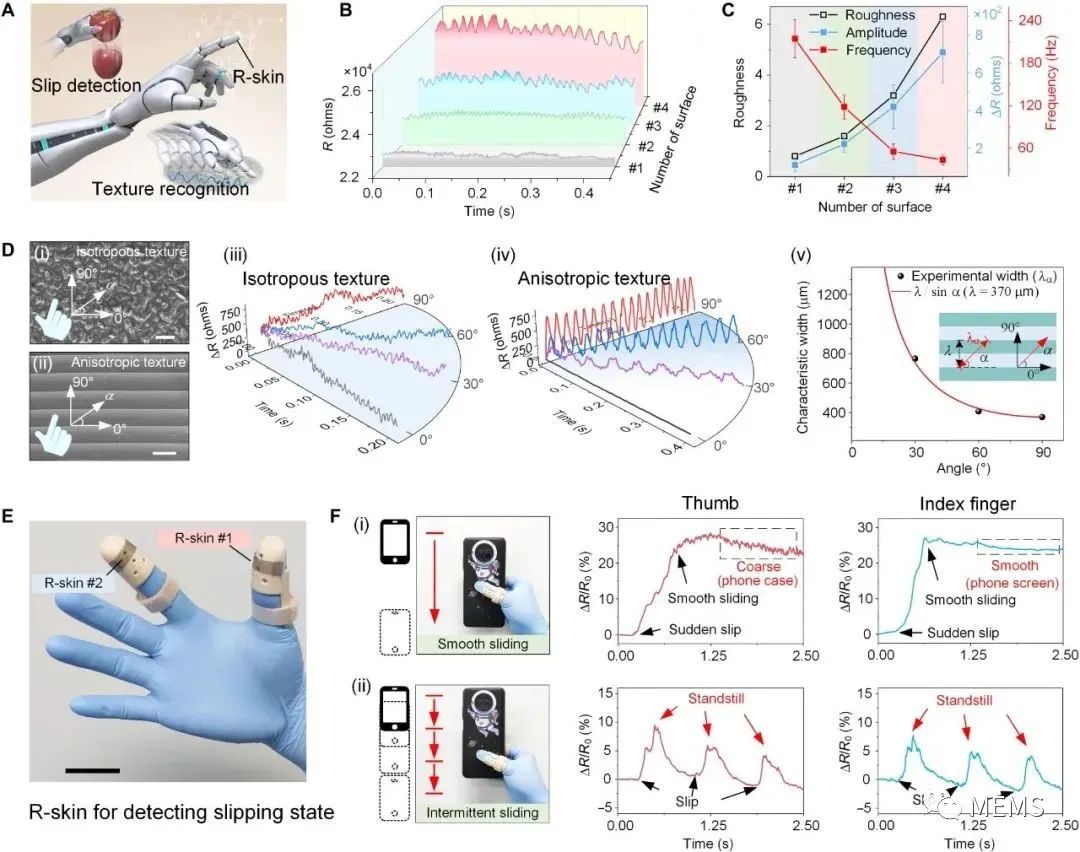
2)R-skin可以在超过人类的响应频率(485 Hz)下直接识别超细表面微结构(5 μm),并实现类似人类的滑动感知功能,包括灵巧地辨别复杂形状物体的纹理,并为抓握提供实时反馈。
论文信息:
DOI: 10.1126/sciadv.ade0720
审核编辑 :李倩
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
智能清洁机器人2013-11-08 9
-
电子产品和机器人皮肤未来会使用什么材料?2016-09-02 4307
-
玩偶秒变机器人:机器人皮了解一下?2018-09-26 3048
-
ABB焊接机器人伺服电机维修常见故障相关资料分享2021-06-28 2171
-
如何控制真实机械臂/机器人呢2021-09-07 1736
-
求大佬分享一种具有17路PWM直流电机的串口遥控机器人2022-01-26 564
-
设计一种可用于大学和学校教授机器人技术的机器人2022-07-25 1825
-
未来机器人皮肤可助宇航员火星探测2019-01-03 3246
-
ElectroSkin机器人皮肤亮相 是下一代软体机器人的新的基本构建块2019-11-21 944
-
多相机光学触觉传感器可用于开发柔软的机器人皮肤2019-11-22 1539
-
RMIT开发出像真实皮肤一样的机器人皮肤2020-09-22 2227
-
基于人工智能的多模态机器人传感系统2022-07-10 2534
-
高灵敏度柔性电子皮肤的研究与应用进展综述2024-03-27 2763
-
柔性电子技术革新与人形机器人的电子皮肤应用前景2024-08-06 1820
-
明治科普 | 让机器人拥有"触感":电子皮肤如何实现?2025-09-02 1253
全部0条评论

快来发表一下你的评论吧 !
