

单片机中红外遥控的基本原理
描述
红外遥控简介
红外遥控是一种无线、非接触控制技术,具有抗干扰能力强,信息传输可靠,功耗低,成本低,易实现等显著优点,被诸多电子设备特别是家用电器广泛采用,并越来越多的应用到计算机系统中。
由于红外线遥控不具有像无线电遥控那样穿过障碍物去控制被控对象的能力,所以,在设计红外线遥控器时,不必要像无线电遥控器那样,每套(发射器和接收器)要有不同的遥控频率或编码(否则,就会隔墙控制或干扰邻居的家用电器),所以同类产品的红外线遥控器,可以有相同的遥控频率或编码,而不会出现遥控信号“串门”的情况。这对于大批量生产以及在家用电器上普及红外线遥控提供了极大的方面。由于红外线为不可见光,因此对环境影响很小,再由红外光波动波长远小于无线电波的波长,所以红外线遥控不会影响其他家用电器,也不会影响临近的无线电设备。
红外遥控的编码目前广泛使用的是:NEC Protocol 的 PWM(脉冲宽度调制)和 Philips RC-5 Protocol的 PPM(脉冲位置调制)。我使用的的遥控器使用的是NEC 协议,其特征如下:
8位地址和8位指令长度;
地址和命令2次传输(确保可靠性);
PWM脉冲位置调制,以发射红外载波的占空比代表“ 0”和“ 1”;
载波频率为38Khz;
位时间为1.125ms或2.25ms;
NEC 码的位定义:一个脉冲对应560us的连续载波,一个逻辑 1 传输需要2.25ms(560us 脉冲+1680us 低电平),一个逻辑0的传输需要 1.125ms(560us 脉冲+560us 低电平)。而遥控接收头在收到脉冲的时候为低电平,在没有脉冲的时候为高电平,这样,我们在接收头端收到的信号为:逻辑1应该是560us低+1680us高,逻辑0应该是560us低+560us高。
NEC 遥控指令的数据格式为:同步码头、地址码、地址反码、控制码、控制反码。同步码由一个9ms的低电平和一个4.5ms的高电平组成,地址码、地址反码、控制码、控制反码均是8位数据格式。按照低位在前,高位在后的顺序发送。采用反码是为了增加传输的可靠性(可用于校验)。
1. ENC 协议的时序图
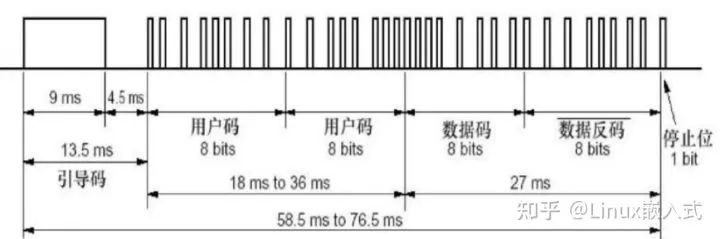
ENC特点如下:
1),协议规定低位首先发送。一串信息首先发送9ms的AGC(自动增益控制)的高脉冲,接着发送4.5ms的起始低电平,接下来是发送四个字节的地址码和命令码,这四个字节分别为:地址码;地址码反码;命令码;命令码反码。
2),如果你一直按那个按键,一串信息也只能发送一次,一直按着,发送的则是以110ms为周期的重复码。
3),接收到的信号是跟发送信号正好反向的。
2.重复码的格式
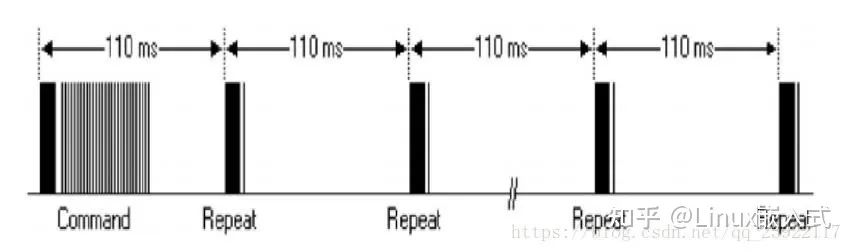
重复码的格式是由9ms的AGC高电平和4.5ms的低电平及一个560us的高电平组成。
3.逻辑“1”的表示

逻辑1的是由560us的高电平和1.69ms的低电平组成的脉冲表示。
4.逻辑“0”的表示
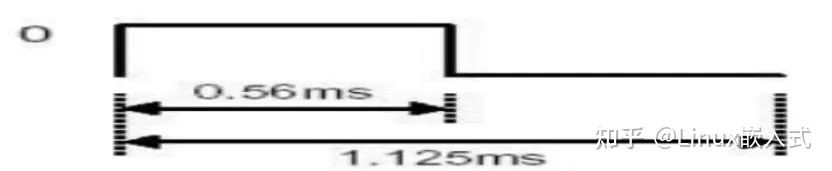
逻辑0的是有560us的高电平和565us的低电平组成的脉冲表示。
5.ENC的解码过程
一般ENC的解码过程为:
1),产生下降沿,进入外部中断15的中断函数,延时一下之后检测IO口是否还是低电平,是就等待9ms的低电平过去。
2),等待完9ms低电平过去,再去等待4.5ms的高电平过去。
3),接着开始接收传送的4组数据
①先等待560us的低电平过去
②检测高电平的持续时间,如果超过1.12ms那么是高电平(高电平的的持续时间为1.69ms,低电平的持续时间为565us。
4),检测接收到的数据和数据的反码进行比较,是否等到的数据是一样的。
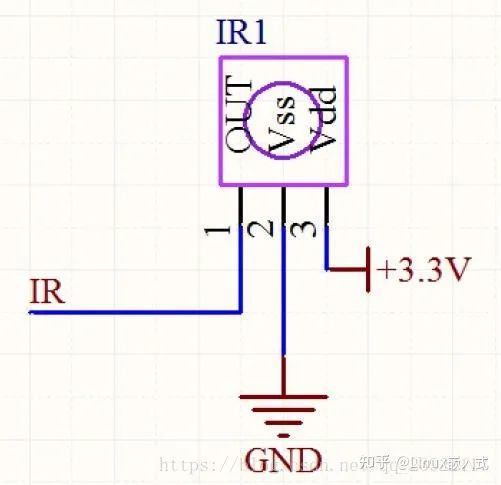
6,下面直接写驱动程序
#include#include #include #include #include #include #define IRDA_GPIO EXYNOS4_GPX3(2) int flag = 0; // 表示数据帧的开始 int num = 0; // 表示数据帧里的第几位数据 static long long prev = 0; // 64bit,记录上次的时间 unsigned int times[40]; // 记录每位数据的时间 irqreturn_t infrared_irq_handler(int irqno, void *dev_id) { long long now = ktime_to_us(ktime_get()); unsigned int offset; int i, j, tmp; if(!flag){ // 数据开始 flag = 1; prev = now; return IRQ_HANDLED; } offset = now - prev; prev = now; if((offset > 13000) && (offset < 14000)){ // 判断是否收到引导码 num = 0; return IRQ_HANDLED; } if(num < 32) times[num++] = offset; if(num >= 32){ for(i = 0; i < 4; i++){ // 一共4个字节 tmp = 0; for(j = 0; j < 8; j++){ if(times[i * 8 + j] > 2000) // 如果数据位的信号周期大于20ms,则是二进制数据1 tmp |= 1 << j; } printk("%02x ", tmp); } printk(" "); flag = 0; } return IRQ_HANDLED; } static void __exit infrared_drv_exit(void) { free_irq(gpio_to_irq(IRDA_GPIO), NULL); } static int __init infrared_drv_init(void) { int ret = -1; ret = request_irq(gpio_to_irq(IRDA_GPIO), infrared_irq_handler, IRQF_TRIGGER_FALLING, "infrared", NULL); if(ret < 0){ printk("request irq failed ! "); return ret; } return 0; } module_init(infrared_drv_init); module_exit(infrared_drv_exit); MODULE_LICENSE("GPL");
还有对应的Makefile:
#指定内核源码路径 KERNEL_DIR = /home/george/1702/exynos/linux-3.5 #指定当前路径 CUR_DIR = $(shell pwd) #MYAPP = dht11_app MODULE = IRDA_for_irq all: make -C $(KERNEL_DIR) M=$(CUR_DIR) modules # arm-none-linux-gnueabi-gcc -o $(MYAPP) $(MYAPP).c clean: make -C $(KERNEL_DIR) M=$(CUR_DIR) clean $(RM) $(MYAPP) install: cp -raf *.ko $(MYAPP) /home/george/1702/exynos/filesystem/1702 #指定编译当前目录下那个源文件 obj-m = $(MODULE).o
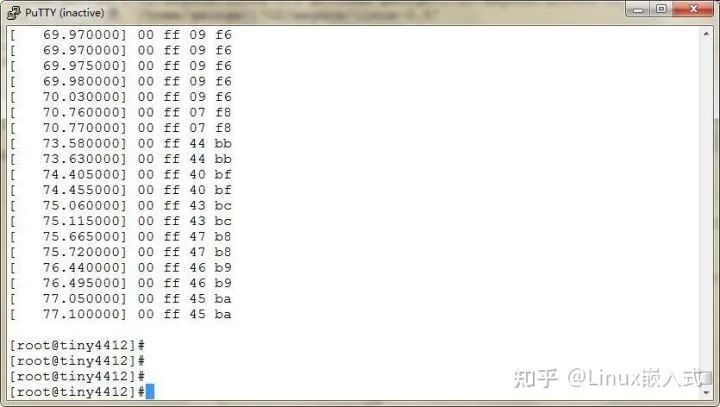
编译生成.ko文件之后,装载,然后进行实物测试,验证效果图如下:
审核编辑:汤梓红。
-
红外光的基本原理2022-01-24 1196
-
51单片机—红外遥控2021-11-11 1363
-
51单片机如何利用外部中断和定时器0对红外信号进行解码?2021-09-28 4654
-
浅析单片机中PWM的基本概念和基本原理2018-09-10 12111
-
基于单片机的红外风扇遥控2016-12-27 1250
-
单片机红外遥控系统2016-04-28 759
-
单片机红外遥控键盘系统2016-03-25 858
-
红外遥控单片机C程序2016-03-14 914
-
基于单片机红外遥控窗帘设计资料2016-01-14 784
-
红外遥控器与单片机的硬件接口的设计2009-05-24 1460
-
MCS-51 单片机基本原理2009-03-18 1189
-
基于单片机的红外遥控密码锁的设计与实现2008-11-26 937
全部0条评论

快来发表一下你的评论吧 !
