

R&S联合中信科智联在实验室环境下,成功通过空口仿真RTK高精度定位测试
描述
//
高精度定位功能,对于智能驾驶的重要性正在逐步被市场发掘,成为L3及以上自动驾驶前装标配功能组件。随着L3及以上自动驾驶渗透率的增长,高精度定位软硬件产品需求量正在同步扩大。RTK高精度定位方法可以消除接收机及卫星钟差、削弱卫星轨道、大气层延迟等误差源对定位的影响,获得厘米级定位精度,因此得到了广泛应用。
中信科智联科技有限公司(原“大唐高鸿智联”)联合罗德与施瓦茨进行创新性开发,在实验室环境下成功通过空口仿真RTK高精度定位测试,可以更好模拟C-V2X OBU的实际工作场景。
原理介绍
RTK(Real Time Kinematic)实时动态测量技术,是以载波相位观测为根据的实时差分GPS(RTDGPS)技术。它是测量技术发展里程中的重要突破,其主要由基准站接收机、数据链、流动站接收机三部分组成。在基准站上安置1台接收机为参考站,对卫星进行连续观测,并将其观测到的数据和测站信息,通过无线电传输设备实时地发送给流动站,流动站GPS接收机在接收GPS卫星信号的同时,通过无线接收设备,接收基准站传输的数据,然后根据相对定位的原理,实时解算出流动站的三维坐标及其精度(即基准站和流动站坐标差△X、△Y、△H,加上基准坐标得到的每个点的WGS-84坐标,通过坐标转换参数得出流动站每个点的平面坐标X、Y和海拔高H)。
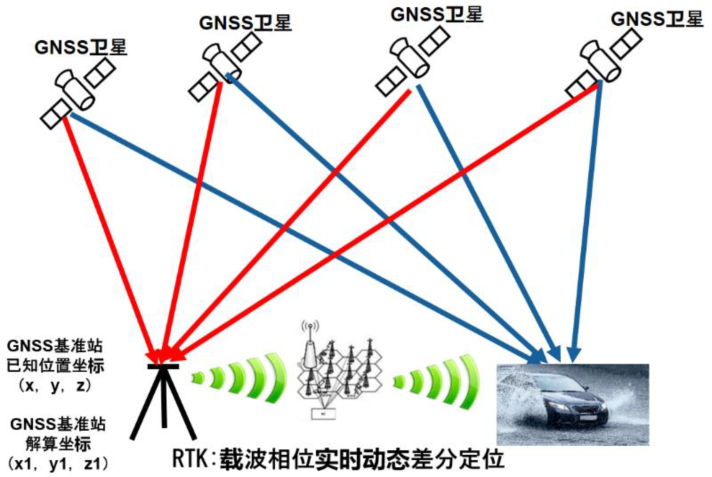
从RTK 的工作原理介绍我们可以看到,RTK 定位需要无线通讯技术参与进来,通过LTE/5G 或Wifi 执行从基站到流动站的数据传输。一种常用的方法是“通过Internet 协议的RTCM 网络传输”(NTRIP)。因此,基站通过NTRIP服务器将其数据提供给所谓的NTRIP Caster。流动站获取RTK GNSS 定位所需的数据是通过NTRIP 客户端从NTRIP Caster 收集的。
测试方案
仿真验证技术正成为智能网联技术开发和验证的重要手段,对高精度定位技术的要求也不断提升。定位算法作为高精度定位技术中的关键技术,在仿真环境下如何对RTK高精度定位算法进行有效的验证与评价呢?通过原理图, 我们可以看出,RTK的仿真测试,需要GPS 信号仿真器, 基站信号仿真器,和参与测试的TBOX。因此实验室仿真环境也离不开对上述关键信号的仿真。
R&S公司的基站仿真和定位导航仿真仪表在测试行业中处于领先对位,因此R&S率先推出了RTK基于NTRIP 技术仿真的测试系统。
仿真系统逻辑示意图如下所示:
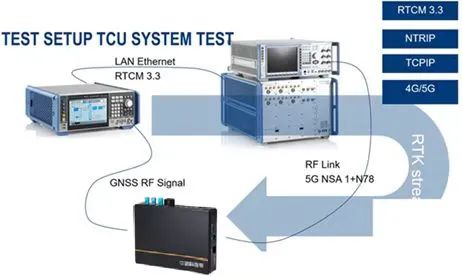
R&S CMW500+CMX500仿真4G或者5G 基站信号, 给中信科智联TBOX 提供4G无线信号和IP仿真。SMBV100B仿真GPS信号 和 NTRIP server, 提供RTCM 数据。
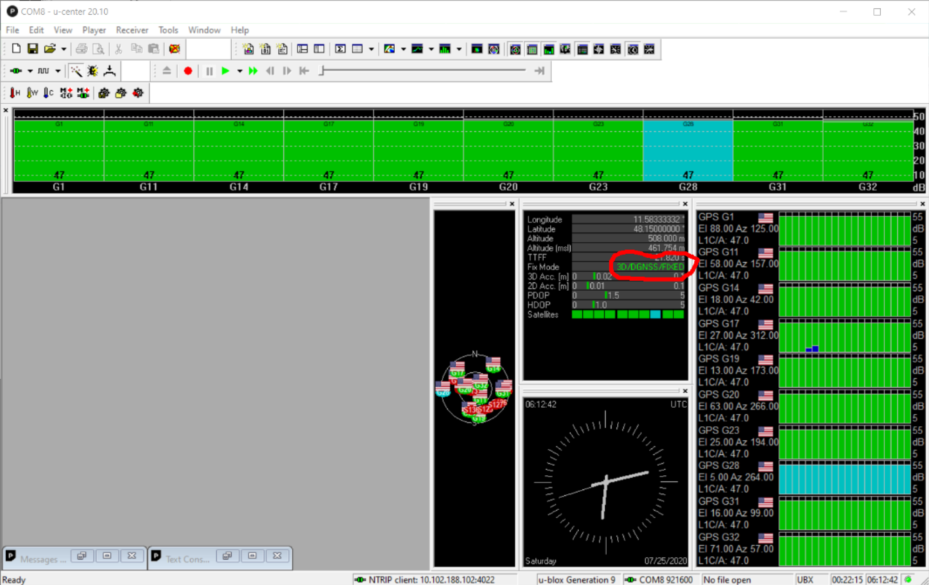
仿真系统实测图:

TBOX 获取RTCM 数据后,在 fix mode 中显示 DGNSS 后, 证明TBOX 已经是RTK 定位。如下图:
总结
在R&S与中信科智联的通力合作下,此RTK仿真验证技术解决方案在业内率先通过验证。借此,我们可以更好地模拟T-BOX的实际工作场景,对其高精度定位性能进行更加有效的评估,从而帮助缩短研发周期,提高产品性能。
关于中信科智联
中信科智联是中国信科集团旗下专注于 C-V2X 车联网标准研究、技术创新、产品研发、生产服务于一体的高新技术企业,是集团车联网产业的骨干载体。
中信科智联从2012年即开展我国核心知识产权的C-V2X(LTE-V2X和NR-V2X)技术标准研究、产品开发和市场推广工作,拥有完整的C-V2X端到端产品系列及车路协同解决方案,是C-V2X车联网行业的领军企业。
罗德与施瓦茨是测试与测量、系统与方案、网络与网络安全领域的知名供应商。公司成立已超过85年,总部设在德国慕尼黑,在全球70多个国家设有子公司。作为一家独立的科技集团,罗德与施瓦茨创新性的产品和解决方案为全球工业客户提供了一个更安全与互联的世界。
审核编辑 :李倩
-
R&;amp;S和Applus在EMC测试环境中完成eCall测试2024-01-12 2485
-
R&;amp;S推出测量高达90GHz的功率传感器NRP90S(N)2022-11-30 2232
-
罗德与施瓦茨公司首个5G VoNR语音性能测试项目通过认证2021-12-11 3073
-
罗德与施瓦茨R&;amp;amp;S VENICE视频服务器满足IP演播室的更好应用2021-01-19 3080
-
R&;amp;amp;S FSC3台式频谱分析仪的主要特点及应用范围2020-12-09 1601
-
R&;amp;amp;S SMC100A射频信号源的主要特点及应用分析2020-12-08 2054
-
罗德施瓦茨R&;S二手CBT特价回收2020-09-07 627
-
安泰测试分享~R&;S预兼容EMI测试解决方案2019-11-19 2673
-
R&;TTE认证的指令是什么?2015-12-23 2074
-
什么是R&;TTE指令?2015-12-08 2540
-
Bluetooth基础原理与测试54页PPT讲解(R&;S CBT and R&;S CBT 32 )2015-08-26 17973
-
供应EMI测试接收机R&;S ESCI2012-01-07 1629
全部0条评论

快来发表一下你的评论吧 !
