

 基于PI双闭环解耦控制的三相SVPWM电压型逆变器(2)--控制器设计
基于PI双闭环解耦控制的三相SVPWM电压型逆变器(2)--控制器设计
描述
在上一篇文章中,我们得到了三相逆变器的数学模型,接下来就是进行控制器的设计。其实对数学模型的设计目的就是研究控制器,控制器才是决定我们逆变结果的直接决定因素。
同时这一篇文章虽然是控制器的设计,但是对数学模型的要求也比较高,所以如果对数学模型的理解不太深入的话,可以参考上一篇文章。
基于PI双闭环解耦控制的三相SVPWM电压型逆变器(1)--数学模型
浅述各个坐标系的特点
有人可能会有疑问,在上一篇文章中,我们得到了许多坐标系下的数学模型,对于控制器的设计,到底用哪一种呢?实际上不同坐标系下的数学模型都是用来描述逆变器,可能有的数学模型可能有一些抽象,不利于我们理解,这些坐标系下的数学模型都有各自的特点。
在abc坐标系下,可以看出,他对数学模型的描述比较充分,足足有6个方程,三个KVL,三个KCL,这些方程是直接通过KVL,KCL定律推出来的,所以说比较容易理解,对逆变器的描述也比较直观。
在αβ坐标系下,最大的优点就是减少了方程的数量,将6个方程简化为4个方程,对于控制系统的简化,是一个比较好的转换。
在dq坐标系下,方程的数量虽然没有减少,但是因为坐标系是旋转的,所以把交流量转换成了直流量,有利于PI控制。从某个角度上来讲,因为使用的是PI控制,所以要进行Park变换。
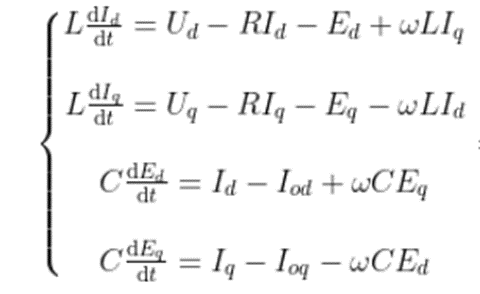
这三种坐标系层层递进,最后dq坐标系是我们进行控制器设计的直接依据。下面是dq坐标系下的数学模型。
拉普拉斯变换
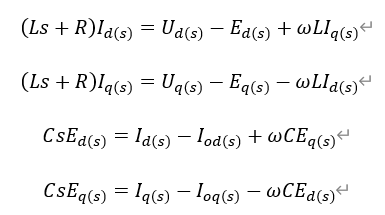
如果要对控制器设计,离不开的就是拉氏变换,我们首先要对上式进行拉氏变换。得到以下4个公式。
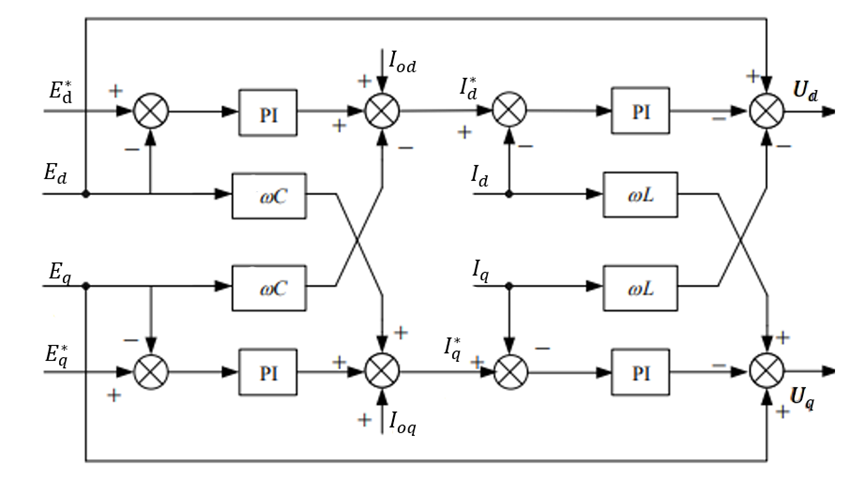
得到上面的传递函数之后,可以画出系统框图
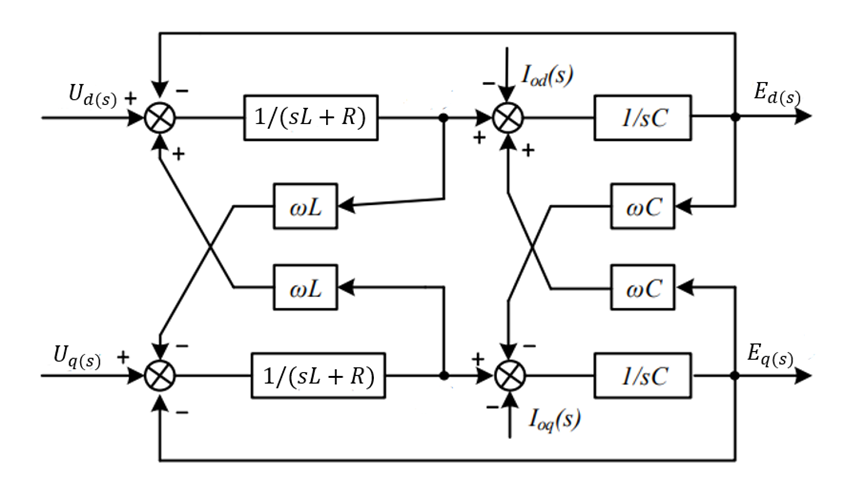
这个图和控制系统框图实际上是反过来的,因为我们是通过输出电压去调整输入电压。
从上面的结构图也可以看出来一个比较重要的问题,就是耦合。d和q轴是耦合在一起的,这时候就需要解耦控制,也比较简单。
引入PI控制器
这时候我们需要把PI控制引入到这个系统当中。对于电压外环,令
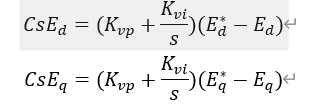
可能很多人看到这里会有些糊涂,为什么等式左边会等于等式右边。在等式左边对电压的微分实际上表示的是电流,等式右边的PI环节,对输出电压目标值与实际值之间做差然后经过PI运算得到的也是电流,所以可以相等。对PI的参数进行调节,可以达到微分的效果。(这里解释的比较模糊我感觉,我对这个地方的理解也比较有限)
将这种等效关系与之前得到的时域下的数学方程相结合,可以得到下面的式子
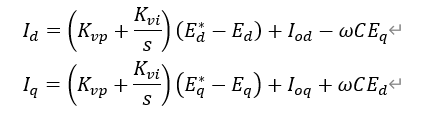
这里的Id,Iq实际上就是电流内环的目标值,既Id*,Iq*。
对电流内环,经过同样的过程,就可以的类似的方程,如下所示
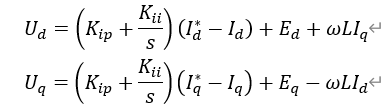
通过以上这四个方程,我们就得到了需要控制器,对应的流程图如下
值得一体的是,通常电压外环的输出不去加负载电流,而是直接作为电流内环的目标值,也可以达到控制效果。
这时候我们只是得到了控制器,并没有计算出PI相关参数,可以利用自控的相关知识进行相关计算,简化调参,也可以直接调参。
审核编辑:汤梓红
-
三相逆变器电压闭环控制仿真2023-12-14 3810
-
基于PI双闭环解耦控制的三相SVPWM电压型逆变器之仿真验证2023-03-03 1003
-
三相逆变器离网控制——PR控制2023-02-28 1668
-
基于PI双闭环解耦控制的三相SVPWM电压型逆变器(4)--仿真验证2023-01-12 3697
-
基于PI双闭环解耦控制的三相SVPWM电压型逆变器(1)--数学模型2023-01-03 6046
-
MATLAB三相LCL滤波型PWM逆变器仿真设计2021-11-16 2791
-
三相逆变器双pi控制器参数如何调节_空间矢量LCL三相逆变器2021-11-08 1228
-
三相电压型逆变器电压闭环控制的Simulink仿真资料免费下载2020-06-01 1835
-
采用双闭环PI和重复控制方案实现三相逆变器设计并进行仿真分析2020-01-14 15380
-
如何设计具有前馈解耦控制的PWM整流器双闭环控制系统及仿真资料说明2019-12-06 2211
-
基于分类算法的双三相感应电机SVPWM2018-09-26 2020
-
同步旋转坐标系中三相电压型变换器的电流解耦控制2017-09-11 953
-
三相电压型PWM整流器解耦控制研究_于佳丽2017-01-08 1242
-
三相电压型SVPWM整流器离散域控制模型的构建2016-03-30 701
全部0条评论

快来发表一下你的评论吧 !
