

脉冲雷达和相干检测
描述
脉冲雷达的基本工作过程如下图所示
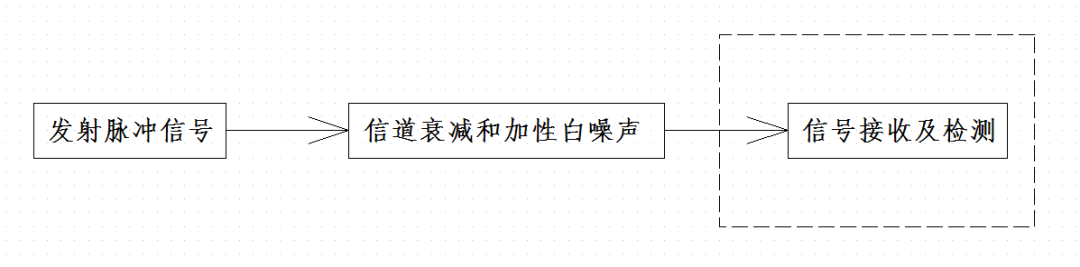
对于脉冲雷达来讲,只对信号的存在进行判断,得出的结果很简单:是否接收到回波信号,附带延时。
本文将重点讲解虚线框中的部分,也就是雷达信号的接收和检测,x(t)为接收端经过预处理的信号。
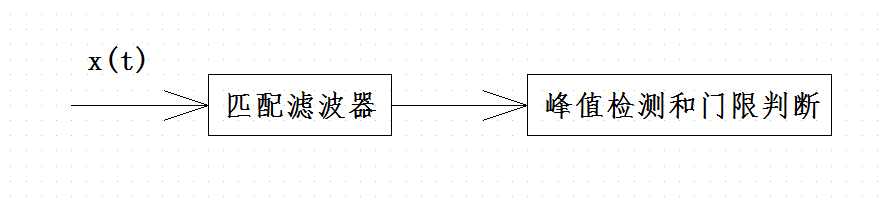
匹配滤波器的概念和意义
匹配滤波器可以等价于一个相关器,其主要作用是去除信道中的白噪声影响。相关器,顾名思义就是计算两个信号的关联程度,或者说相似程度。
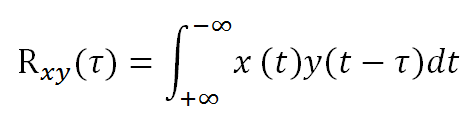
Rxy(τ)的值越大,则表示x(t)和y(t)相似程度越高。假设要从x(t)要检测出有用信号s(t),那么这个滤波器该要怎么设计呢?
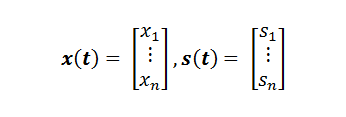
仔细观察上式,可以做如下变换

假设x(t),s(t)为两个空间向量X,S,t是[t0,t1]时间宽度,维度等于抽样点数,连续的话就是无穷维。
现在问题就转化成了求

当x(t)和s(t)线性相关时,等式成立,对于一维函数来讲,有如下关系
当 x(t) = k s(t)时,即取有用信号s(t)自身做匹配滤波器的模板,可以得到最大的相关性输出。
换句话说,s(t)和与自己的有尺度变换的信号相关性是最强的。
波形的选择
雷达脉冲波形的选择有3个要点:
1.尽可能地利用系统带宽
2.波形简单易于实现
3.自相关函数呈现边带特征,主旁瓣和峰值易于识别
要满足以上3点,chirp信号,也称LFM,即线性调频信号是一个不错的选择,其数学表达式如下:
其中β为扫频带宽,τ为扫频时间,βτ称为BT积
波形是这样的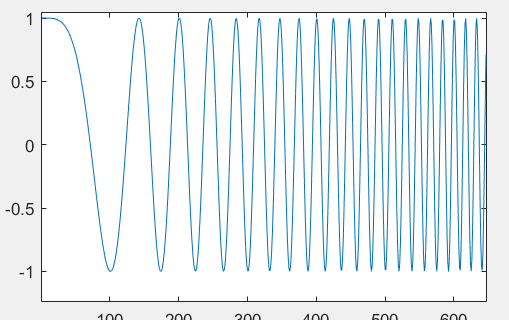
频率随时间是这样变化的
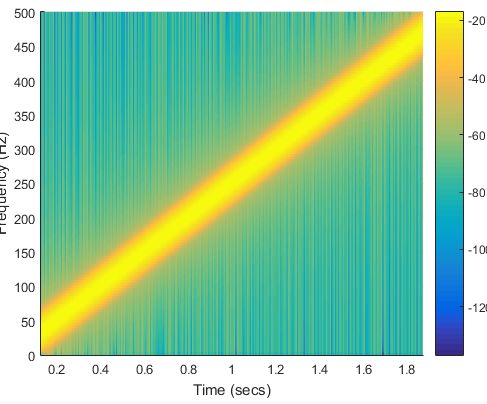
其瞬时频率F(t) 为
频谱是这样的
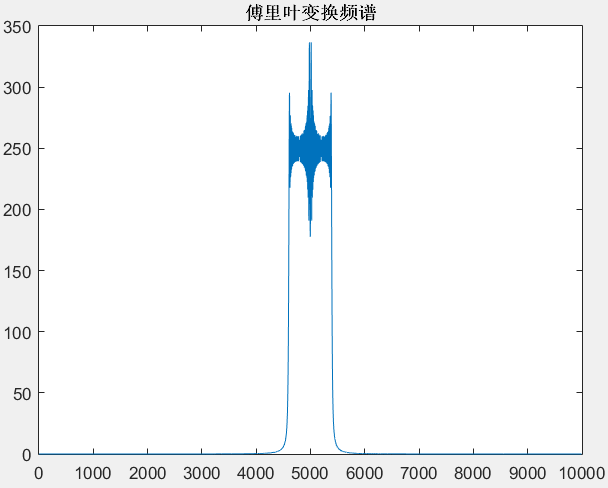
近似一个带宽为βHz的矩形。
自相关函数是这样子的
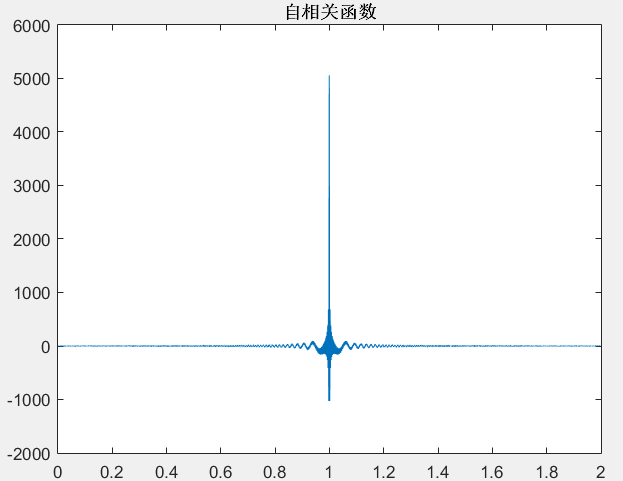
接近一个δ函数,具有很强的指向性,非常容易分辨。实际上它的瑞利分辨率为1/β S,瑞利分辨率可以近似理解为时间分辨率,意为最小的可分辨的回波间隔。
系统仿真
假设有这样一个雷达系统,其中频接收机采样率125M SPS,中频带宽20 MHz,脉冲时长10uS,发射功率5W,接收衰减120dB(含来回信号衰减,天线增益等影响因素),噪声增益106dB,现在探测500m外的一个目标,情况如何呢?
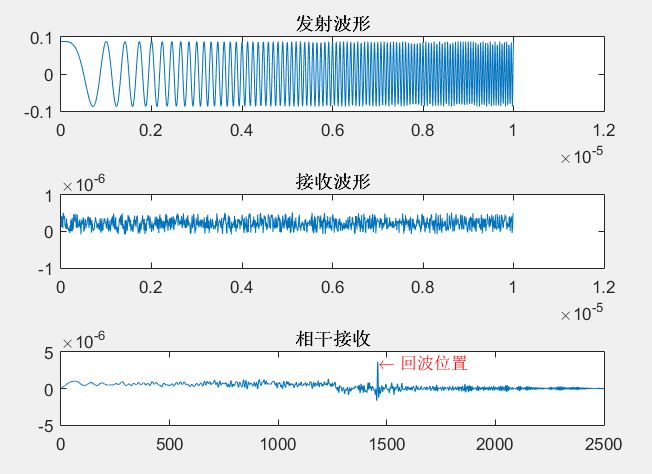
可以看到接收信号已经完全被噪声淹没,但相干接收机仍然检测到了信号。
实际距离500米,测算距离4.992000e+02米,误差0.160000%
发射功率 4.929363e+00,接收功率 4.843071e-12,噪声功率 7.985455e-11,信噪比 -12.171789dB
参考仿真代码
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 |
|
参考资料:《雷达信号处理基础 Fundamentals of Radar Signal Processing》[美] Mark A .Richards
审核编辑 :李倩
-
FMU40-ARB2A4脉冲雷达物位计是电磁波还是机械波2024-11-04 1075
-
什么是脉冲雷达2024-10-15 4110
-
揭秘单脉冲雷达精准锁定目标技术2024-04-29 1855
-
单脉冲雷达是指什么?2023-03-30 8481
-
FMCW和线性调频脉冲雷达2022-07-26 6231
-
脉冲雷达和调频连续波雷达的区别2022-04-20 9003
-
单脉冲雷达技术.上海无线电二厂编2021-10-18 790
-
高频脉冲雷达物位计具有哪些应用优势和特点2020-11-28 4935
-
脉冲雷达的优点,脉冲波形参数2020-11-16 11526
-
科普-脉冲雷达的基础知识2020-10-30 3133
-
脉冲雷达的优势_脉冲雷达的波形参数2020-10-16 8539
-
一种低重频脉冲雷达的速度解算方法2012-05-25 889
-
MIMO雷达的相干脉冲串检测性能2009-11-24 594
-
基于无载频脉冲雷达信号等幅度追踪法检测生命信号2009-11-18 652
全部0条评论

快来发表一下你的评论吧 !
