

高速模数转换器精度、分辨率和动态范围之间的差异
描述
在第1部分中,介绍了一般静态模数转换器不精度误差和涉及带宽的ADC不精度误差。希望能够更好地了解ADC误差以及这些误差如何影响信号链。因此,请记住,并非所有元件都是平等的——有源和无源器件都是如此,因此无论向下选择什么作为最终器件以适应系统,模拟信号链中都会存在误差。
本文将介绍精度、分辨率和动态范围之间的差异。它还将揭示不准确性如何在信号链中累积并导致错误。这对于理解在为新设计定义系统参数时如何正确指定或选择ADC起着重要作用。
精度、分辨率与动态范围
转换器的许多用户似乎可以互换使用术语精度和分辨率。但是,这是一个错误。术语精度和分辨率不相等,但相关,因此不应互换使用。请将准确性和分辨率视为表亲,但请不要将双胞胎。
精度只是误差,或者被测量值与其真实值的偏差程度。精度误差也可以称为灵敏度误差。分辨率只是测量值可以表示或显示的精细程度。即使系统可能有12位分辨率,也不意味着它能够测量12位精度的值。
例如,假设万用表有六位数字来表示测量值。该万用表的分辨率为六位数,但如果最后一位或两位数字似乎在测量值之间“闪烁”,则分辨率会受到影响,测量的准确性也会受到影响。
任何系统或信号链中的误差都会在整个过程中累积,使原始测量失真。因此,了解系统的动态范围也是衡量设计信号链精度和分辨率的关键。
让我们再看一下多米表。如果有六位数字表示,则此设备的动态范围应为 120 dB(或 6 × 20 dB/十倍频程)。但请记住,底部两位数字仍在闪烁。因此,实际动态范围仅为80 dB。这意味着,如果设计人员打算测量 1 μV(或 0.000001 V)伏特,则此测量中涉及的误差可能高达 100 μV,因为实际器件的精度仅为 100 μV(或 0.0001 V 或 0.0001XX V,其中 XX 表示底部两位闪烁的数字)。
实际上,有两种方法可以描述任何系统的整体精度:直流和交流。 直流精度表示整个给定信号链中误差的“偏差”累积。这有时被称为“最坏情况”分析。交流精度表示在整个信号链中累积的噪声误差项。这定义了系统的信噪比(SNR)。然后,这些误差相加,降低了SNR,并产生了整个设计中更真实的有效位数或ENOB。获得这两个参数可以有效地告诉用户系统对静态/奇迹和动态信号的准确度。
低频信噪比、ENOB、有效分辨率与无噪声码分辨率的关系
请记住,ADC可以“接收”许多类型的信号,这些信号通常被归类为直流或交流,并以数字方式对其进行量化。了解ADC在系统中的误差意味着设计人员必须了解将要采样的信号类型。因此,取决于信号类型取决于定义转换器对整个系统的误差贡献的方式。这些转换器误差通常以两种方式定义:代表直流型信号的无噪声代码分辨率和代表交流型信号的“SNR方程”。
所有有源器件,如ADC内部电路,都会因电阻噪声和“kT/C”噪声而产生一定量的均方根噪声。即使直流输入信号也存在这种噪声,并解释了转换器传递函数中的代码转换噪声。这通常称为折合到输入端的噪声。折合到输入端的噪声通常通过检查将直流输入施加到转换器上的多个输出样本的直方图来表征。大多数高速或高分辨率ADC的输出是代码分布,以直流输入的标称值为中心。为了测量其值,ADC的输入接地
或连接到高度去耦的电压源,收集大量输出样本并将其绘制为直方图(有时称为接地输入直方图)—见图1。由于噪声近似于高斯,因此可以计算直方图的标准差σ,对应于有效输入均方根噪声,并以LSBs均方根表示。
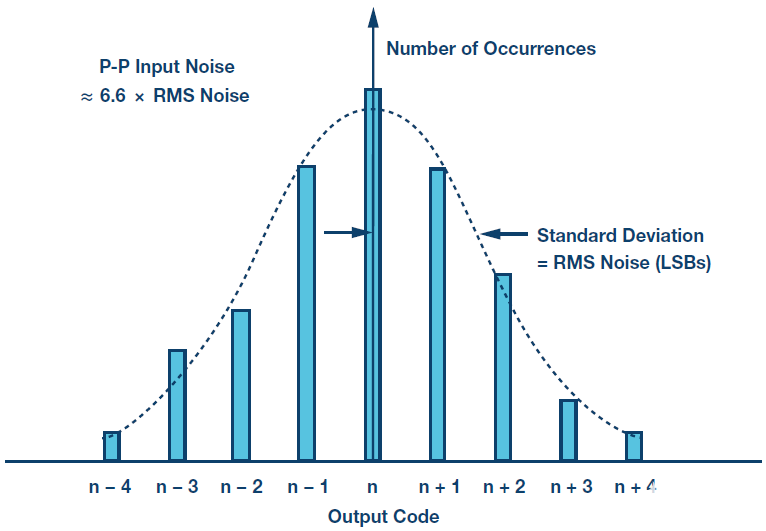
图1.转换器输入折合噪声或ADC“接地输入”直方图。
虽然ADC固有的微分非线性(DNL)可能会导致与理想高斯分布的一些微小偏差,但它至少应该近似于高斯分布。如果代码分布具有大而明显的波峰和波谷,则可能表明印刷电路板布局不良、接地技术不良或电源去耦不当等。
通常,折合到输入端的噪声可以表示为均方根量,通常具有LSB均方根的单位。涉及这些类型量的规格通常与高分辨率精密型转换器相关联,因为它们采集的采样率低和/或直流型或慢速移动信号。Σ-Δ型ADC专为精密测量而设计,分辨率范围为16至24位,具有数据手册规格,如折合到输入端的噪声、有效分辨率和无噪声代码分辨率,以描述其直流动态范围。
另一方面,用于音频应用的高频Σ-Δ型ADC通常仅根据总谐波失真(THD)和总谐波失真加噪声(THD + N)来表征。
逐次逼近 (SAR) 转换器涵盖广泛的采样速率、分辨率和应用。它们通常具有折合到输入端的噪声规格,但此外还有交流输入信号的SNR、ENOB、SFDR和THD规格。
尽管采样频率为数百MHz或更高的高速转换器(如流水线)通常根据SNR、SINAD、SFDR和ENOB等交流规范进行指定,但它们也可以捕获直流型或慢速移动信号。因此,了解如何从数据手册中给出的交流规格中得出高速转换器的低频性能非常有用。
侧边栏讨论:信噪比方程
理想转换器在数字化信号时产生的最大误差为±1/2 LSB,如理想N位ADC的传递函数所示。跨越几个LSB的任何交流信号的量化误差都可以通过峰峰值幅度为q(LSB的权重)的不相关锯齿波近似。查看此近似值的另一种方法是,实际量化误差同样可能发生在 ±1/2 q 范围内的任何点。
量化误差随时间变化的函数如图2所示。简单的锯齿波为分析提供了足够准确的模型。锯齿误差方程由下式给出
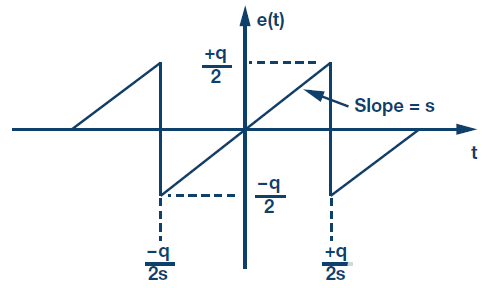
图2.量化噪声作为时间的函数。

e(t) 的均方值可以写成:

执行简单的集成和简化,

因此,均方根量化误差为

锯齿波误差波形产生的谐波远远超过奈奎斯特带宽或直流至FS/2,其中 FS= 转换器采样率。然而,所有这些谐波折叠(混叠)回奈奎斯特带宽,并相加产生等于q/√12的均方根噪声。
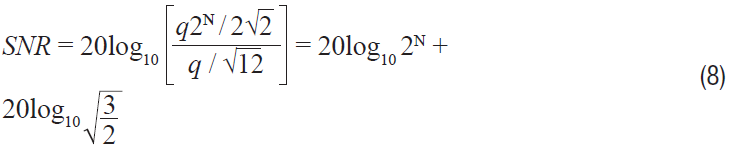
量化噪声近似于高斯,在目标奈奎斯特带宽上均匀分布,通常为直流至FS/2.这里的基本假设是量化噪声与输入信号无关。理论信噪比现在可以假设满量程输入正弦波计算:

因此,输入信号的均方根值为

因此,理想N位转换器的均方根信噪比为


将慢速直流型信号和高速交流型信号规格量相关联确实需要一些数学运算。因此,翻开你的大学数学书,翻到后面的恒等式表,让我们在下面回顾一下如何在低频输入的SNR、ENOB、有效分辨率和无噪声码分辨率之间建立关系。
当FSR = ADC满量程范围,n = 折合到输入端的噪声时,有效分辨率(rms)定义如下:

请注意:

因此

或

对于交流分析,请使用满量程正弦波输入。另外,请参阅上面的侧边栏讨论,其中:

因此
稍微重新排列一下,我们得到
这将产生以下内容:

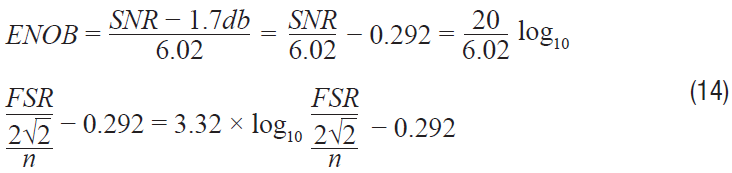
因此,通过公式16中的代入,我们可以推导出ENOB、交流型信号和直流型(慢速移动)信号之间的关系。或

为了验证这一点,让我们计算理想N位ADC的ENOB。
其中满量程范围 (FSR) = 2N折合到输入端的噪声为n = 1/√12 = 0.289。
代入这些值,
或
总而言之,当查看直流慢速移动信号时,系统的ENOB大约比转换器的无噪声码分辨率大1位(确切地说是0.92位),比转换器的有效分辨率小2位。
然而,随着信号移动得更快,或者涉及带宽的交流型信号,转换器的SNR和ENOB变得与频率相关,并且通常会随着更高频率的输入而降低。
信号链中的转换器不准确
现在,转换器误差已经理解,信号链的其余部分将用于在系统级理解这些概念。图3描述了一个简单的数据采集信号链示例。在这里,传感器连接到一根电缆,最终连接到数据采集卡。传感器的交流信号在到达要采样的ADC输入之前,会经过两级预调理放大器。这里的目标是设计一个系统,该系统可以在其原始值的±0.1%内准确表示传感器的信号。嗯......听起来很有挑战性?
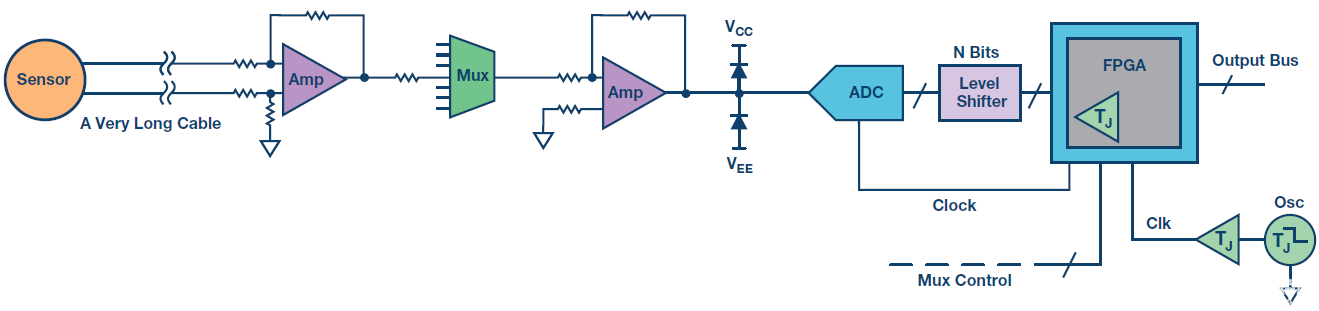
图3.简单的数据采集信号链。
为了设计这样的系统,重要的是要考虑可能影响传感器原始信号的误差类型以及它们在整个信号链中的位置。想象一下,当信号最终采样时,转换器最终看到什么。
假设本例中的ADC具有10 V满量程输入和12位分辨率。如果转换器是理想的,则可以确定其动态范围或SNR为74 dB。

但是,数据手册规格仅显示该转换器的SNR为60 dB或9.67 ENOB。

请注意SNR和ENOB的计算:根据数据手册中的SNR值计算ENOB时,设计人员应清楚这可能包括也可能不包括谐波。如果它确实包括失真,则可以使用SINAD,它被定义为SNR +失真,有时也称为THD(总谐波失真)。
因此,LSB尺寸可以定义为12.2 mV p-p或VFS/2N= 10/29.67.这大大减少了数字输出上可能发生的表示数量。请记住,由于ADC中的噪声,底部LSB/位闪烁!

这也意味着转换器的精度为±6.12 mV或0.0612%。

此外,这意味着对于施加到转换器的1.00000 V输入,输出可以在0.99388 V和1.00612 V之间。
因此,具有9.67位ENOB的12位转换器只能测量精度为0.1%的信号。转换器的动态范围约为60 dB,而不是74 dB(理想的12位ADC)。

从视觉上看,这可以描述为图 4 中的以下内容。

图4.记住每十年 20 dB 或 3 × 20 = 60 dB。
表 1 描述了一些用于参考所需系统性能的快速等式。
| 准确度 (%) | 误差(毫伏) | 动态范围(分贝) |
| 10 | 100 (0.1 V) | 20 |
| 1 | 10 (0.01 V) | 40 |
| 0.1 | 1 (0.001 V) | 60 |
| 0.01 | 0.1 (0.0001 V) | 80 |
其他系统不准确之处
请注意上述信号链示例中建议的所有前端组件。仅仅因为转换器精度达到或超过为系统定义的系统精度规格,就有更多的不准确性需要理解,即前端、电源、任何其他外部影响或环境。
如上图3所示,这种信号链的设计可能非常激烈,超出了本文的范围。但是,表2可以快速了解与这种信号链相关的不准确性/误差。
| 装置 | 设备错误 | 电路误差 |
| 放大器 1 | 失调电压(毫伏) | 电阻容差(%) |
| 失调电压漂移 (mV/°C) | 电阻漂移 (ppm/°C) | |
| 输入失调电流 (nA) | 电阻器寿命(%/1000小时) | |
| 输入失调电流漂移 (nA/°C) | RF/R我增益误差 | |
| 输入偏置电流 (nA) | ||
| PSRR (dB) | ||
| 共模抑制比 (分贝) | ||
| 电压噪声 (nV/√Hz) | ||
| 电流噪声 (pA/√Hz) | ||
| 复 用 | 导通电阻 (Ω) | |
| 隔离度(分贝) | ||
| PSRR (dB) | ||
| 共模抑制比 (分贝) | ||
| 放大器 2 | 失调电压(毫伏) | 电阻容差(%) |
| 失调电压漂移 (mV/°C) | 电阻漂移 (ppm/°C) | |
| 输入失调电流 (nA) | 电阻器寿命(%/1000小时) | |
| 输入失调电流漂移 (nA/°C) | RF/R我增益误差 | |
| 输入偏置电流 (nA) | ||
| PSRR (dB) | ||
| 共模抑制比 (分贝) | ||
| 电压噪声 (nV/√Hz) | ||
| 电流噪声 (pA/√Hz) | ||
| 模数转换器 | 线性度 (LSB) | 振荡器抖动 (ps) |
| 失调误差 (LSB) | 门 1 抖动 (ps) | |
| 失调误差漂移 (ppm/°C) | 门 2 抖动 (ps) | |
| 增益误差 (%FS) | ||
| 增益误差漂移 (ppm/°C) | ||
| PSRR (dB) |
任何信号链中都存在许多误差,更不用说电缆和其他外部影响,这些误差在决定此类系统的设计方面也起着重要作用。无论误差累积如何,它最终都会在转换器上与信号的存在一起采样——假设误差不足以掩盖正在采集的信号!
使用转换器进行设计时,请记住,在定义系统精度时,等式有两个部分。如上所述,有转换器本身,以及用于在转换器之前对信号进行预处理的其他所有内容。请记住,每损失一位,动态范围就会降低6 dB。推论,每增加一位,系统的灵敏度就会增加2×。因此,前端要求的精度规格要比为信号采样而选择的转换器精度好得多。
为了说明这一点,请使用图 3 中所示的相同前端设计。假设前端本身有20 mV p-p的不准确性;即累积噪声,如图5所示。系统精度仍定义为0.1%。相同的 12 位转换器是否具有足够的精度来维持定义的系统规格?答案 - 不,原因如下。
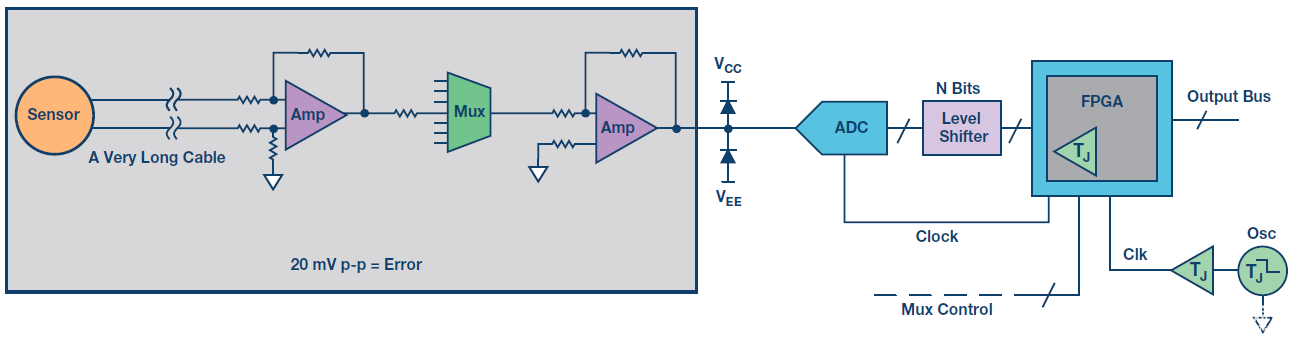
图5.简单的数据采集信号链,定义前端噪声。
以下是使用SNR = 60 dB的ADC如何解决这个问题的方法。

请注意,20 mV噪声会使系统性能降低1位或6 dB,从而使系统性能从60 dB降至54 dB。为了解决这个问题,也许应该选择一个新的转换器,以保持60 dB或0.1%的系统精度。让我们选择一个SNR/动态范围为70 dB或ENOB为11.34位的ADC,看看这是否有效。

看来性能变化不大。为什么?因为前端的噪声太大,无法理解0.1%的精度,即使转换器的性能本身比规格好得多。需要改变的是前端设计,以获得所需的性能。这在下面的图 6 中形象地表示。看看为什么最后一个配置示例不起作用?设计人员不能简单地选择更好的ADC来提高整体系统性能。
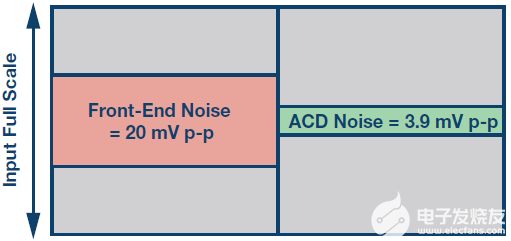
图6.前端噪声与12位、70 dB ADC噪声比较。
将一切整合在一起
之前选择的10 V满量程、12位ADC的动态范围为60 dB,可实现0.1%的精度。这意味着总累积误差为 <10 mV 或 10 V/(1060/20) 需要满足才能达到 0.1% 的要求。因此,必须更换前端元件,以便使用SNR为70 dB的转换器将前端误差降至9 mV p-p,如图7所示。
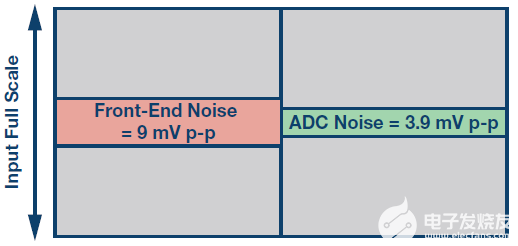
图7.更低的前端噪声与12位、70 dB ADC噪声比较。
如果使用14位、74 dB ADC,如图8所示,则可以进一步放宽对前端的要求。但是,权衡可能会带来成本上的上行空间。这些权衡需要根据设计和应用进行评估。例如,为更严格的容差和更低的漂移电阻支付更多的费用可能比为更高性能的ADC付出更多的代价可能是值得的。
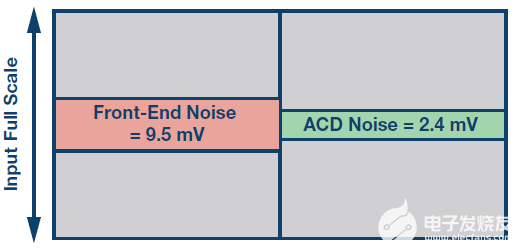
图8.前端噪声与14位、74 dB ADC噪声比较
结束分析
上述信息应该提供了一些关于精度误差、分辨率和动态范围如何相关的指南,但在为任何需要满足一定测量精度的特定应用选择转换器时,提供了不同的要点。了解所有元件误差以及这些误差如何影响信号链非常重要。请记住,并非所有组件都是平等的。开发一个能够捕获所有这些误差的电子表格是插入不同信号链元件以快速进行评估和权衡元件的简单方法,如表2所示。在组件之间权衡成本时尤其如此。有关如何生成此类电子表格的进一步讨论将在本系列的第 3 部分中介绍。最后,请记住,简单地提高信号链中转换器的性能或分辨率不会提高测量精度。如果仍然存在相同数量的前端噪声,则精度不会提高。这些噪音或不准确之处只会被测量到更精细的程度,最终设计师的老板会花费更多的钱来做到这一点.
审核编辑:郭婷
-
使用高动态范围模数转换器的DC751A-G演示板2019-05-10 1394
-
高分辨率模数转换器的噪声有什么影响?2019-08-07 2661
-
什么是模数转换器的噪声、ENOB和有效分辨率?2021-04-06 1692
-
如何去提高模数转换器的分辨率?2021-04-22 2133
-
为什么我们需要模数转换器?哪个ADC转换器更好?2023-02-15 1858
-
深度剖析模数转换器(ADC)的解密分辨率和采样率2023-02-16 1640
-
详述ADC精度和分辨率的差异2023-12-20 1844
-
高分辨率模数转换器(ADC)概述2011-01-01 4170
-
一文详解转换器精度、分辨率和动态范围之间的差异2018-07-05 8461
-
精度、分辨率和动态范围之间的差异2020-09-15 8317
-
解密模数转换器的分辨率和采样率2023-02-17 2641
-
高速模数转换器精度、分辨率和动态范围之间的差异2023-02-28 2031
-
ADS1283高分辨率模数转换器数据表2024-07-16 703
-
TLV1562高速可编程分辨率模数转换器数据表2024-07-29 525
-
ADS1284高分辨率模数转换器数据表2024-07-30 587
全部0条评论

快来发表一下你的评论吧 !
