

利用Arduino开发板连接弯曲传感器的方法-上
电子说
描述
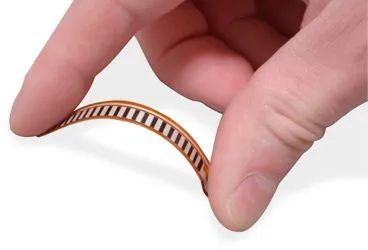
弯曲传感器(Flex Sensor)是一种低成本且易于使用的传感器,专门设计用于测量偏转或弯曲的程度。
由于在90年代在Nintendo Power Glove中用作游戏界面,因此它变得流行。从那时起,人们一直将其用作角度计来确定关节运动、门传感器、碰撞开关用于墙壁检测或机器人抓地力上的压力传感器。
弯曲传感器概述
弯曲传感器实际上是一个可变电阻器,弯曲时电阻变化。由于电阻与弯曲量成正比,因此通常也称为柔性电位器(Flexible Potentiometer)。
弯曲传感器通常有两种尺寸:一个是2.2英寸(5.588厘米),另一个是4.5英寸(11.43厘米)长。
物理构造
弯曲传感器由带有导电墨水沉积的酚醛树脂底物组成。将分段的导体放在顶部,形成柔性电位器,在偏转时电阻会改变。
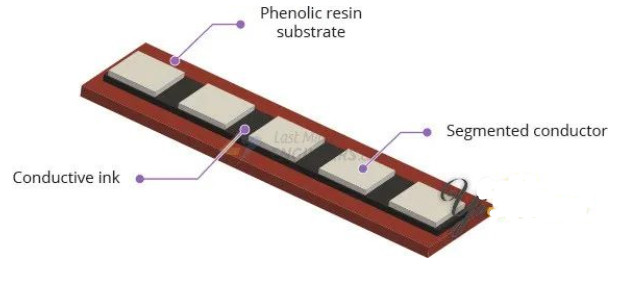
使用的方向
弯曲传感器的设计仅在一个方向上弯曲 - 远离导电墨水(如图所示)。沿另一个方向可能会损坏弯曲传感器。
还要注意不要将传感器弯曲靠近底部,因为传感器的底部非常脆弱,弯曲时可能会破裂。
弯曲传感器如何工作?
传感器上打印的导电墨水充当电阻。当传感器是笔直的时,这种电阻约为25K。
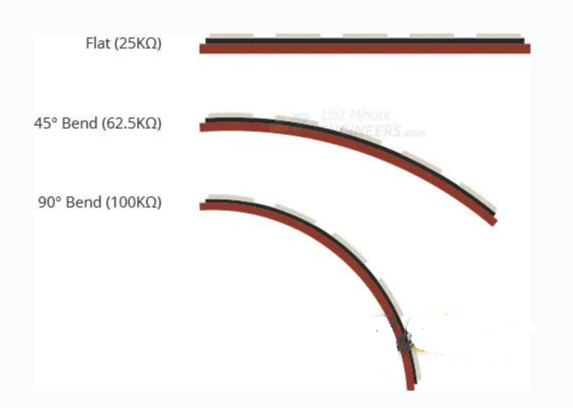
当传感器弯曲时,将拉伸导电层,从而减少横截面(想象一下拉伸橡皮筋)。该减少的横截面导致电阻增加。在90°角,这种电阻约为100kΩ。
当传感器再次拉直时,电阻返回其原始值。通过测量电阻,您可以确定传感器弯曲的程度。
读取弯曲传感器的方法
读取弯曲传感器的最简单方法是将其与电阻(通常为47kΩ)连接起来,制作一个分压器。为此,您将传感器的一端连接到电源,而另一端将其连接到下拉电阻。然后将下拉电阻和弯曲传感器之间的点连接到Arduino的ADC输入引脚。
这样,您可以创建一个可变电压输出,可以通过Arduino的ADC输入来读取。
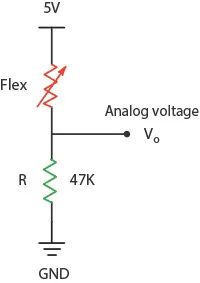
请注意,您测量的输出电压是施加在下拉电阻的电压,而不是弯曲传感器的电压。
分压器配置的输出由等式描述:
在等式中,随着弯曲半径的增加,输出电压降低。例如,使用5V电源和47K下拉电阻,在传感器水平(0°)时,电阻值相对较低(约25kΩ)。这将导致以下输出电压:
当弯曲到最大时(90°),电阻值增大到100kΩ。这将导致以下输出电压:
弯曲传感器与Arduino Uno开发板的硬件连接
将弯曲传感器连接到Arduino非常容易。您需要将47kΩ下拉电阻串联连接到弯曲传感器,创建分压电路。然后,将下拉电阻和弯曲传感器之间的点连接到Arduino的ADC输入A0引脚。
请注意,弹性传感器实际上是一个可变电阻。这意味着您可以将它们连接到任何一种方式,工作都可以正常。
-
Arduino传感器–ROHM传感器评估套件概览2023-02-23 2092
-
利用Arduino开发板连接弯曲传感器的方法-下2023-01-21 2464
-
如何将Arduino板与不同的传感器连接2022-11-03 1441
-
Arduino玩家如何用ShieldBuddy开发板玩转FPU2021-12-10 2707
-
配置esp8266开发板的Arduino开发环境2021-12-08 2029
-
请问Arduino开发板如何连接倾斜传感器?2021-10-28 1874
-
如何去制作一种基于Arduino开发板和压力传感器的肺活量计2021-09-18 2425
-
如何利用MSP430F5529开发板去控制温度传感器2021-09-07 1157
-
Arduino开发板使用DHT11温湿度传感器的方法 精选资料分享2021-07-13 1880
-
如何将倾斜传感器连接到Arduino开发板上?2021-07-06 1999
-
如何使用Arduino开发板和温度传感器实现实时气象站?2021-04-09 4884
-
Arduino的各种常用开发板2021-03-24 27731
-
Arduino开发板的测试程序和土壤湿度传感器的资料详细说明2020-05-07 1852
-
基于arduino开发板FRDM-KL25Z脉搏心率传感器2016-06-22 11262
全部0条评论

快来发表一下你的评论吧 !
