

ESP8266无人机原理图+PCB合集
描述
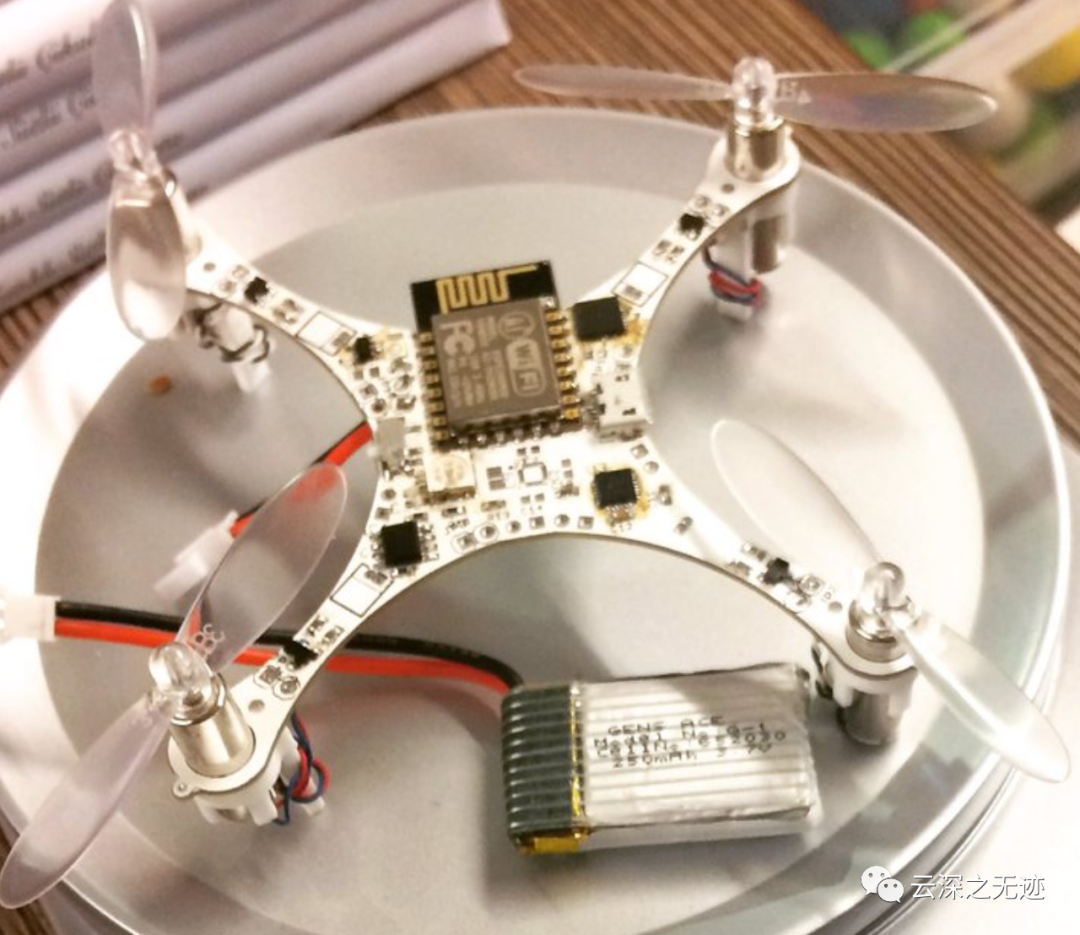
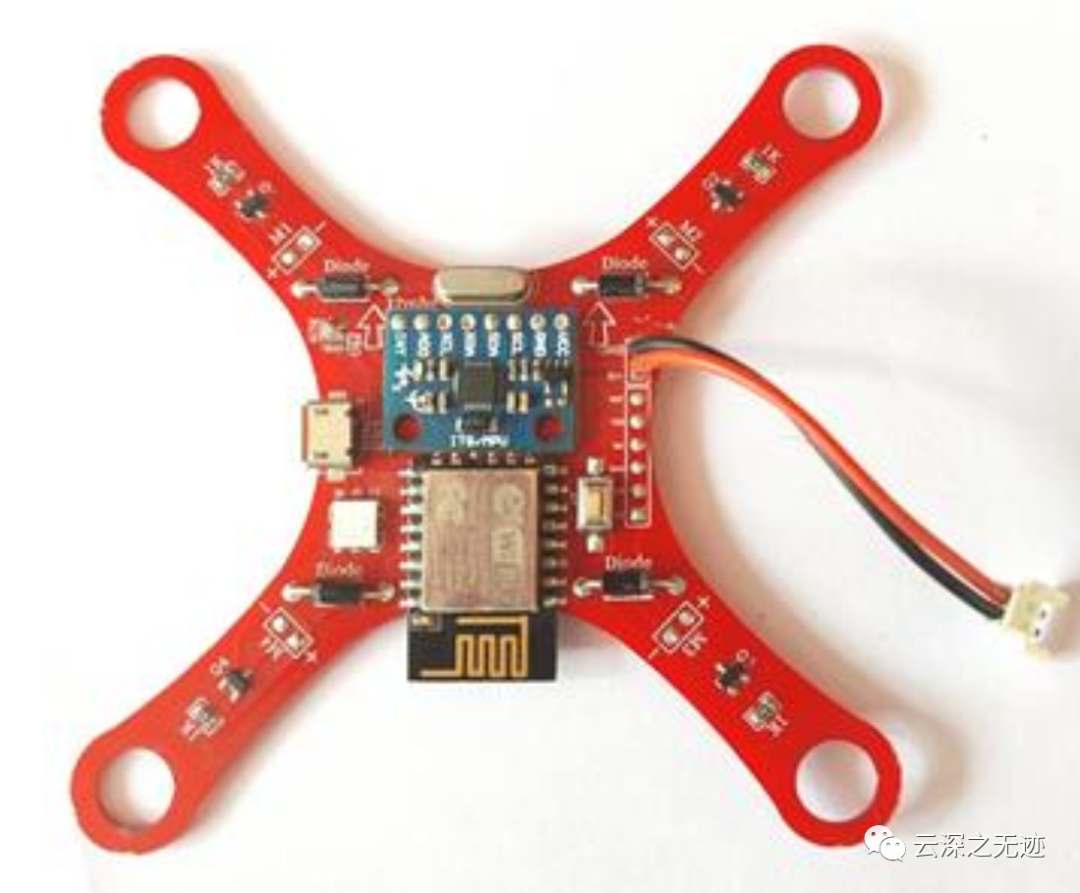
以前写过一个ESP8266做的飞控,但是一直不会设计PCB,最近学会了。就蠢蠢欲动了,不过在设计以前正经的教程没有几个。。。我找遍全网把ESP8266为主控的无人机项目都做了一次梳理。
现在作为廉价的配置就是ESP8266(树莓派Pico)+MPU6050+MOSx4(Si2302 )+LDO。然后原理图已经绘制完毕,接下来的问题就是PCB的布局,以及一些附件的添加。
其实Pico的成本也不高,就是没有人愿意开这个头。
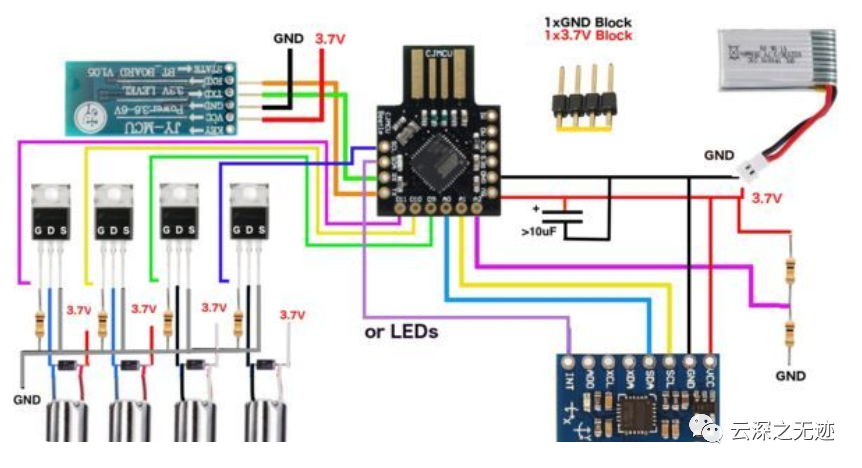
在驱动部分都是使用的MOS管,但是可能会买到质量不好的,这个需要看命了:
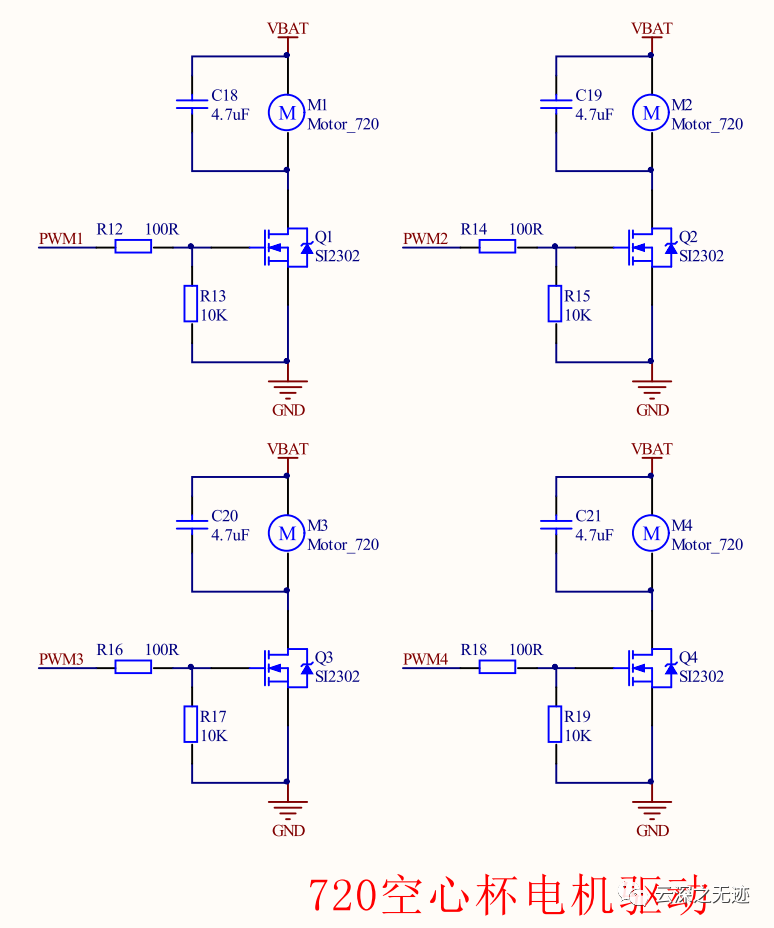
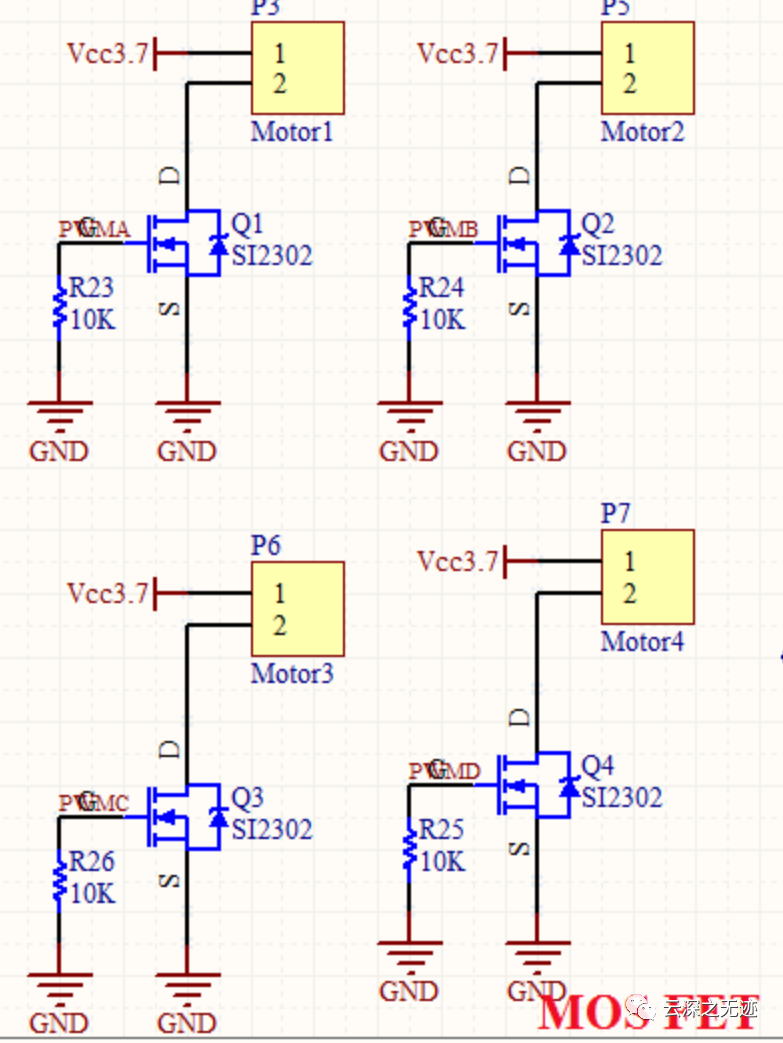
这个是一个常用的驱动电路
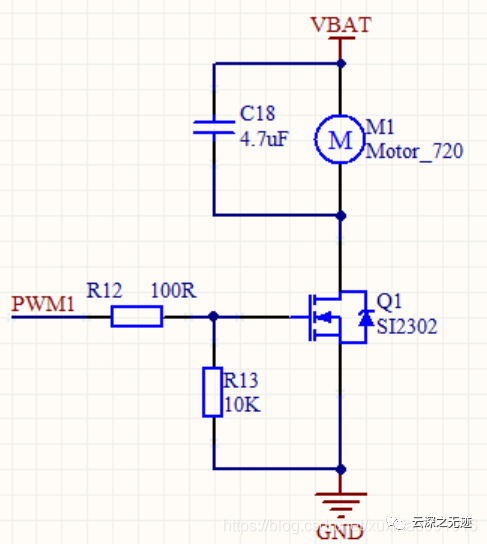
单个电路原理
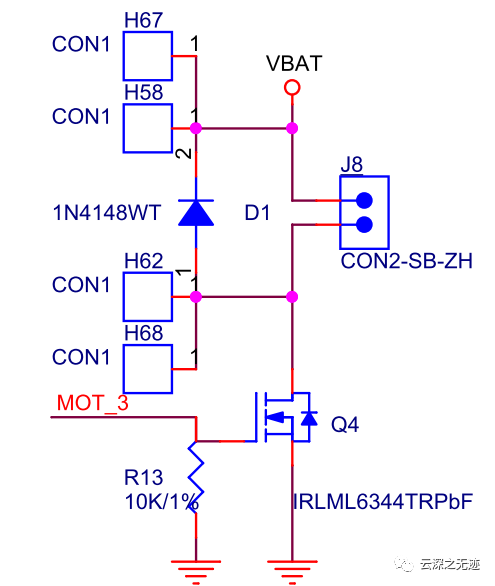
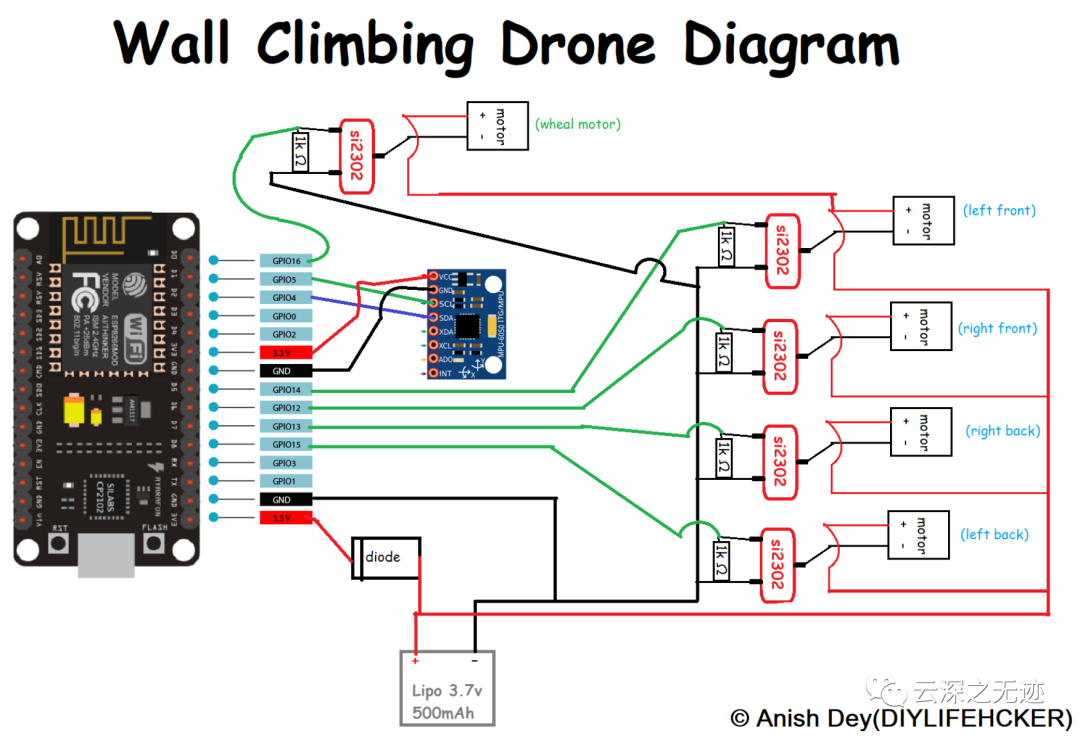
这个是ESP32 无人机的一个MOS驱动,大同小异的,也可以使用
单个MOS管的原理图,在器件布局的时候,一般机器偏大,会将管子布置的靠近电机,小的时候倒是没有啥说法,一般是布置到4角。
在这里
上面这个图有毛病(一开始的图):这个设计有大问题。电机的绕组具有电感特性,当PWM信号让MOS关断时,电感电流找不到续流通道,会产生一个超级高的感应电动势,足以把MOS的源极和漏极击穿。需要在电机上并联续流二极管,或者用半桥拓扑。也正因为电机有这个特性,用PWM控制电机才不会导致电机输出顿挫。在有续流回路的情况下,当关断MOS,电机上的电流会缓慢下降,而不是直接变成0。只要你让PWM频率足够高,以至于在系统输出最小占空比时电机电流也不会降到0,电机在整个运转周期中就会平稳的产生扭矩。这个过程和驱动DCDC电路的BUCK拓扑一模一样。
这个也是推荐的一种接法
每个MOS管接一个大电阻下拉,目的是为了防止在单片机没接手电机的控制权时,电机由于PWM信号不稳定开始猛转。接一个下拉电阻,保证了场管输入信号要么是高,要么是低,没有不确定的第三种状态。那么电机也只有两种状态,要么转,要么不转。主控输出的是PWM波形,用于控制场效应管的关闭和导通,从而控制电机的转动速度。
在最后还有张老图,加上
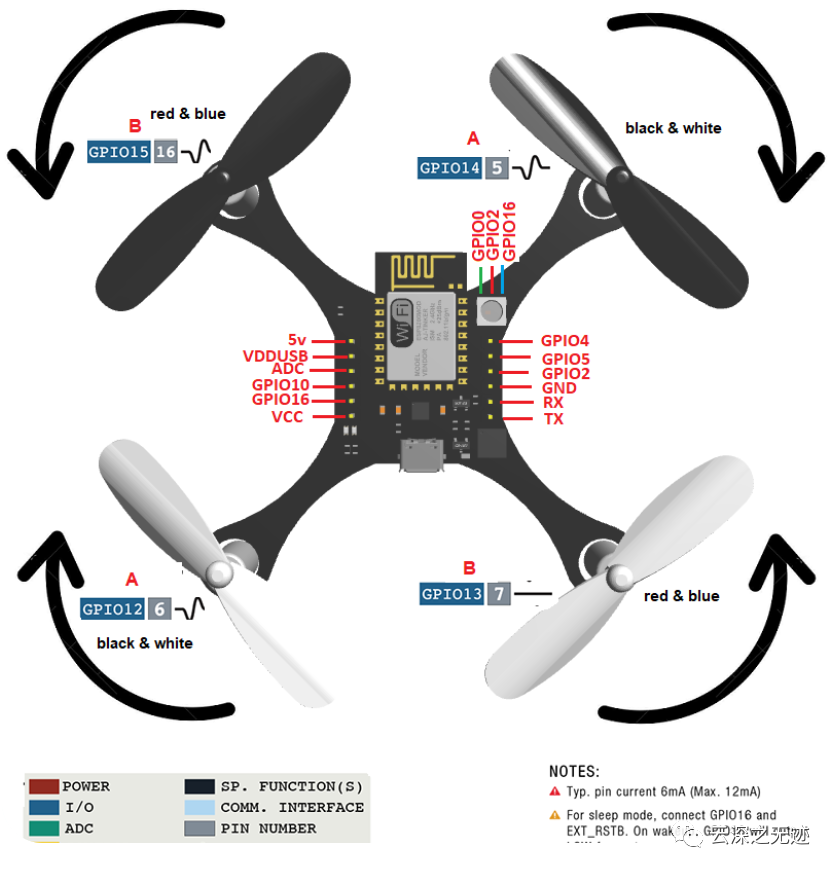
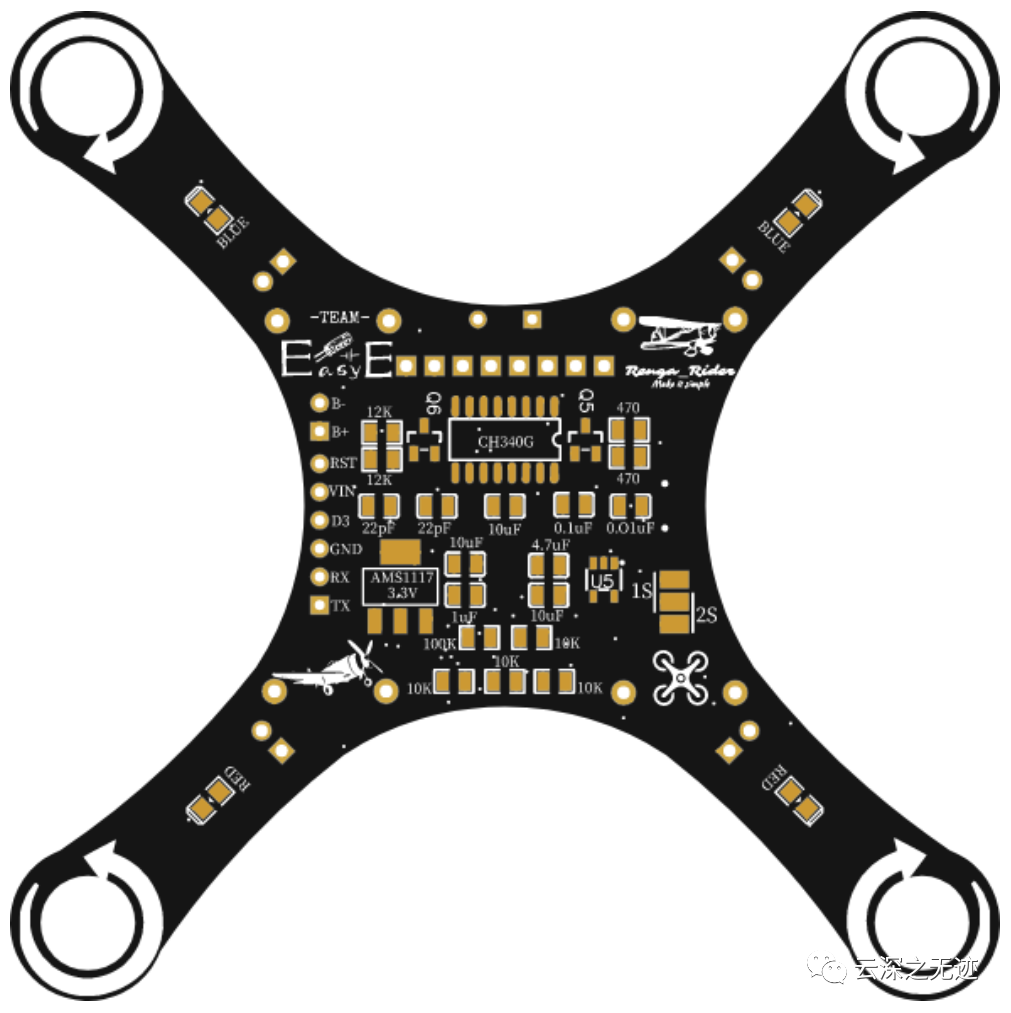
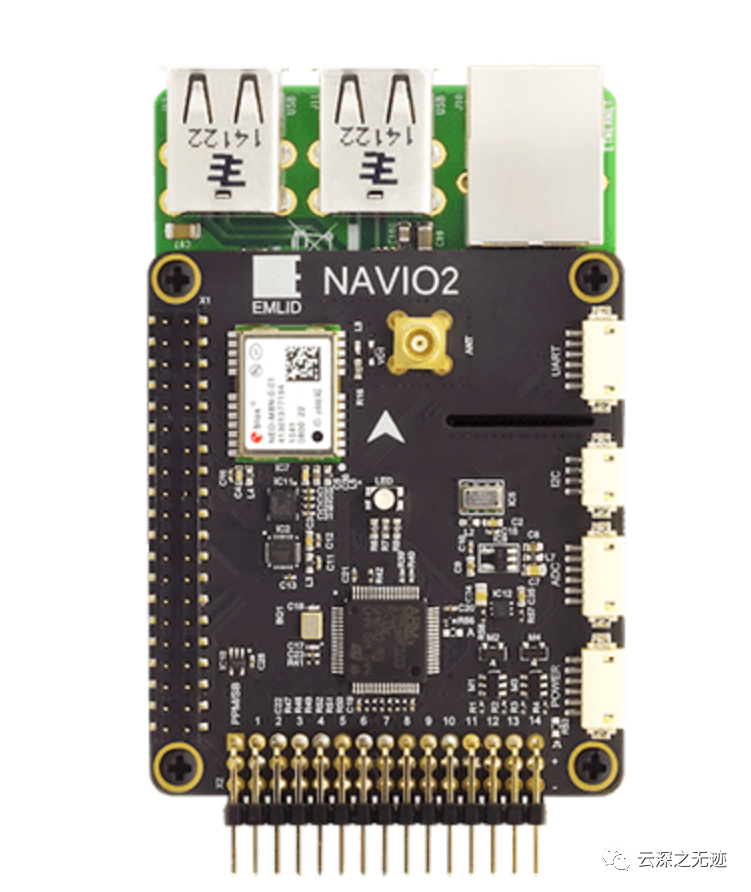
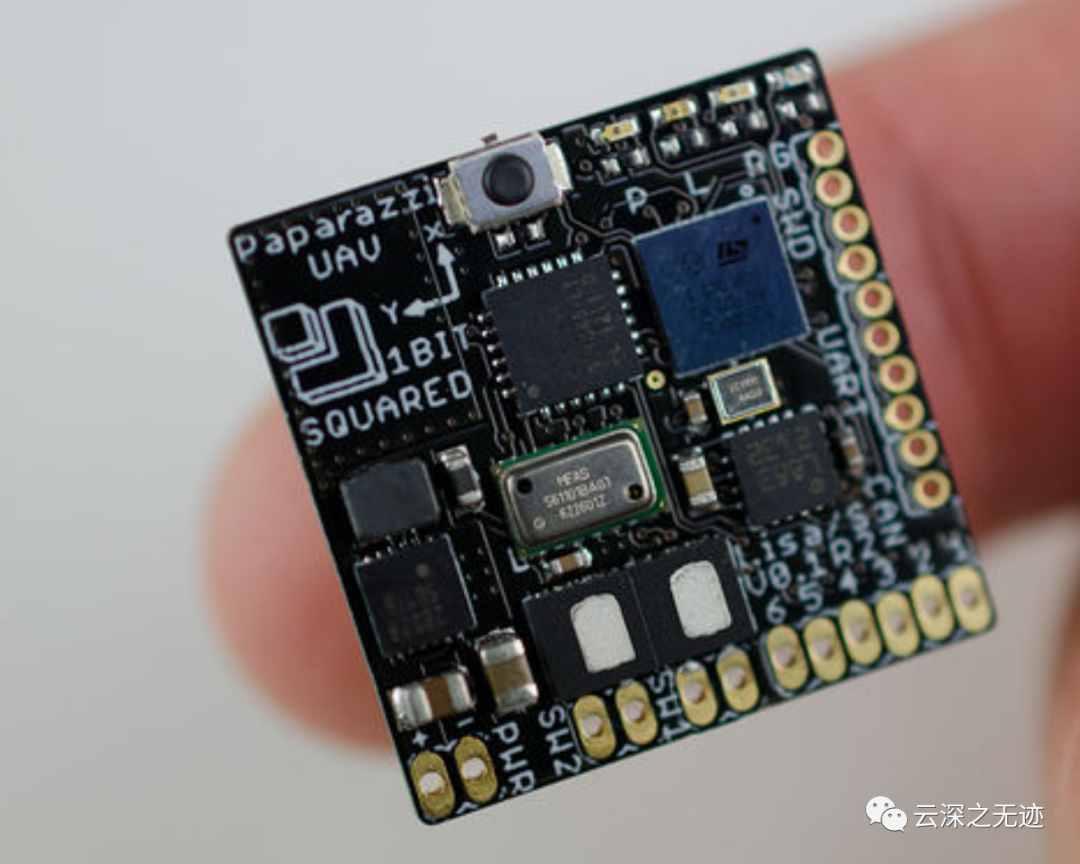
这个就是看一个PCB的设计,注意板载天线为了性能整块移动在外部。这个图真好看呀,不知道是拿啥绘制的。把多余的引脚的可以印出来放置成标准件,不过会加2G的质量,我还是不建议放了。扩展接头 2×10 针 1.27mm (0.05”) 间距,包括电源、I2C 和 UART,这些接口引出的时候注意成对设计。 可以设计成2 层 PCB ,带有用于数字和模拟电源的独立稳压器!放屁用什么2层板了,lz现在会4层板了!(没素质了哈)
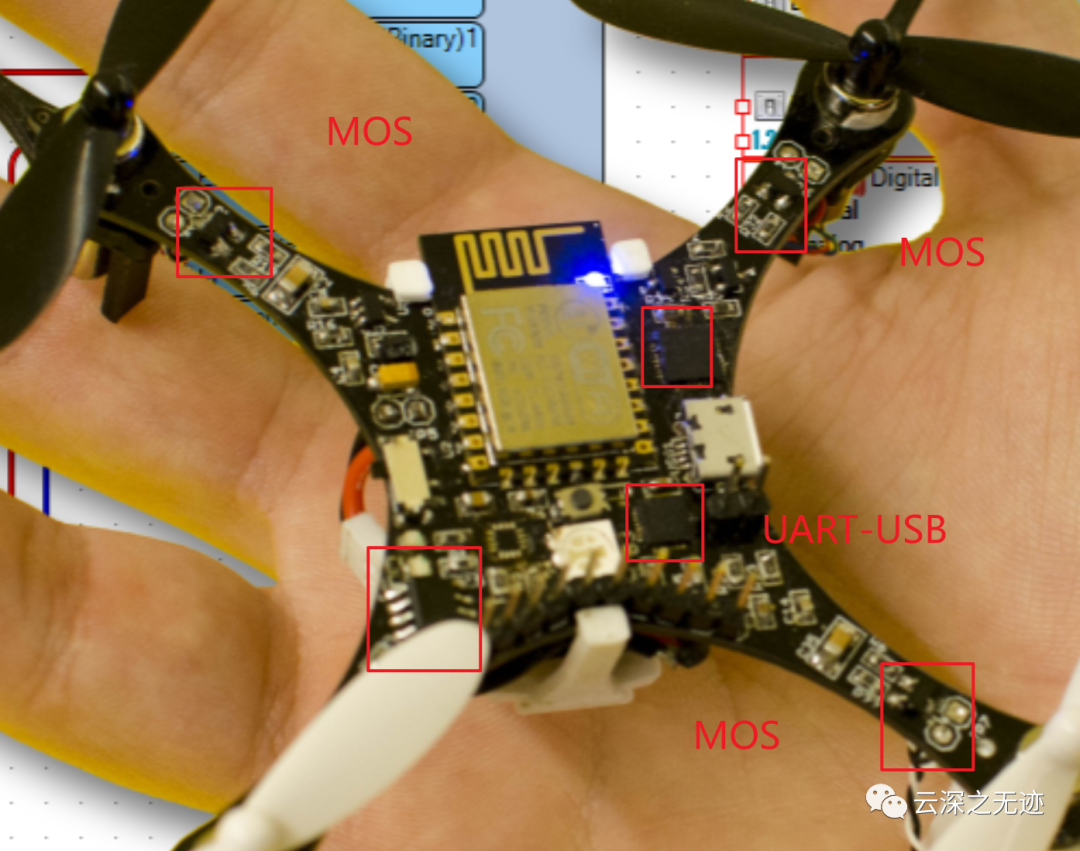
UART转USB的芯片一般都是CP2102,记得离得近些

不错
甚至可以做成这样的无敌简陋的版本
在我看来。模块化设计是必要的,所以也可以考虑驱动和主控这块变成接插件
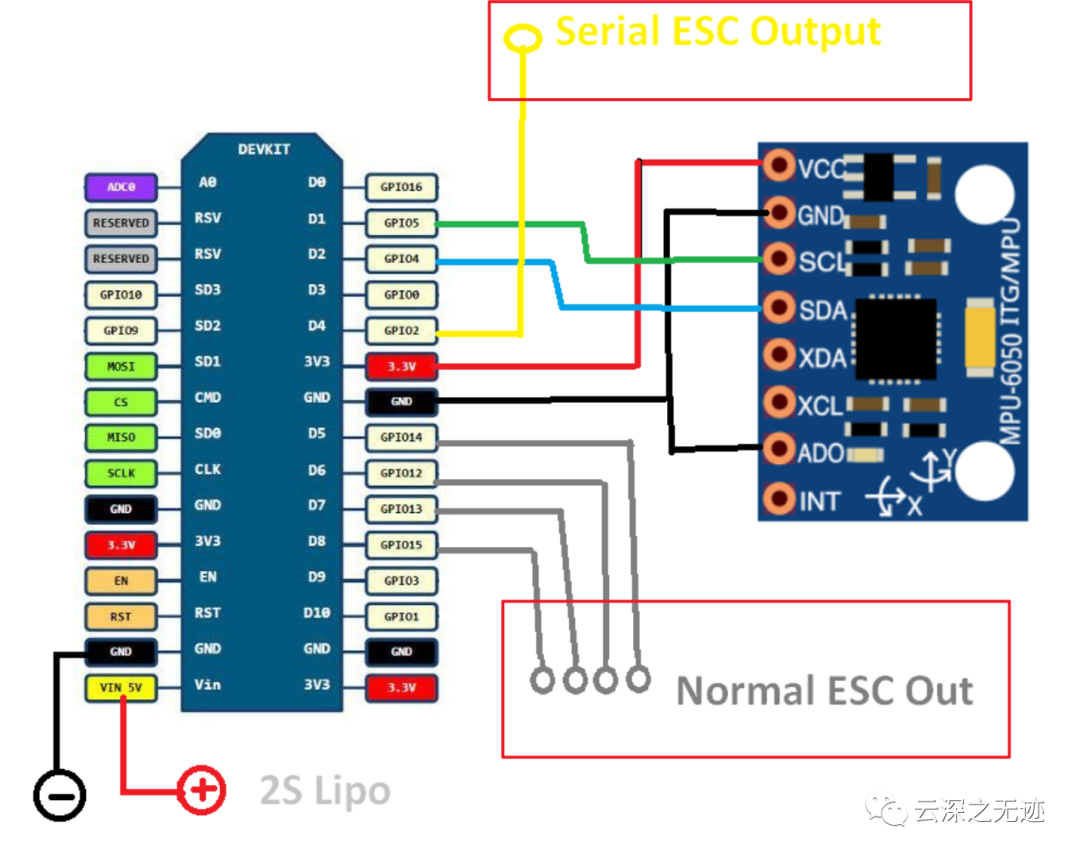
还有一种做法是直接就留PWM接ESC就行,这里就可以移植数字的ESC协议了,有刷变无刷,单车变摩托了。
这个是找到的一个中古接线图
这个和上面的方案一样
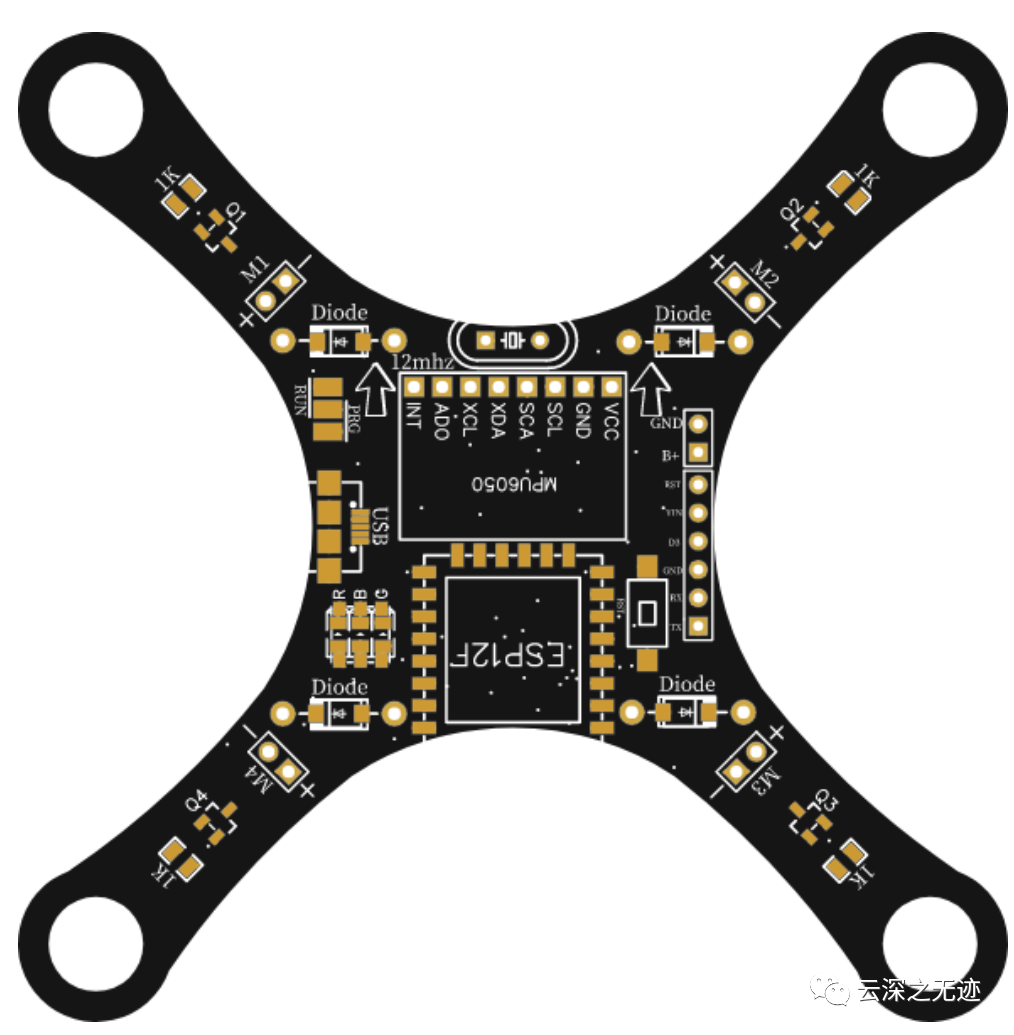
这个也是双层板的设计,可以看到布局吧,但是这个MPU的小板子就很占地方了。

别笑,反正可以飞起来的

这个是STM芯片的设计
• 3 英寸四轴飞行器:450 – 850mAh • 4 英寸四轴飞行器:850 – 1300mAh • 5 英寸四轴飞行器:1300 – 1800mAh • 6 英寸四轴飞行器:1500 – 2200mAh • 7 英寸四轴飞行器:1800 – 3200mAh 上面是不同尺寸的无人机搭载的电池容量选型。
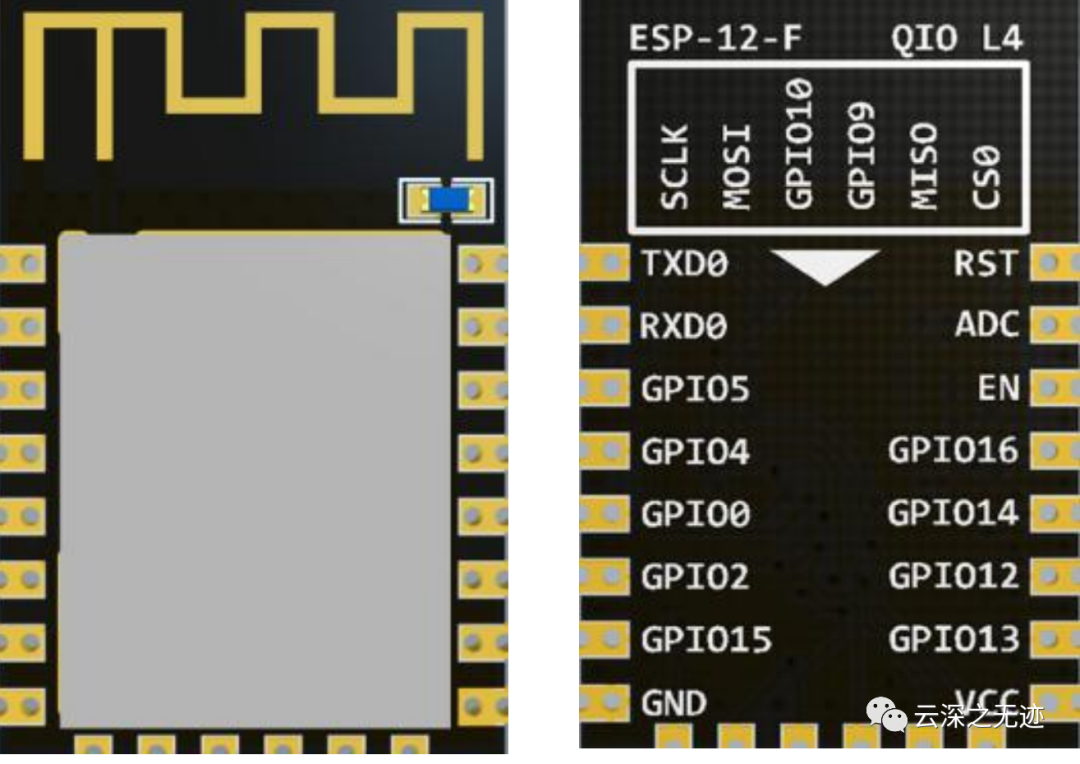
使用的ESP8266-12F
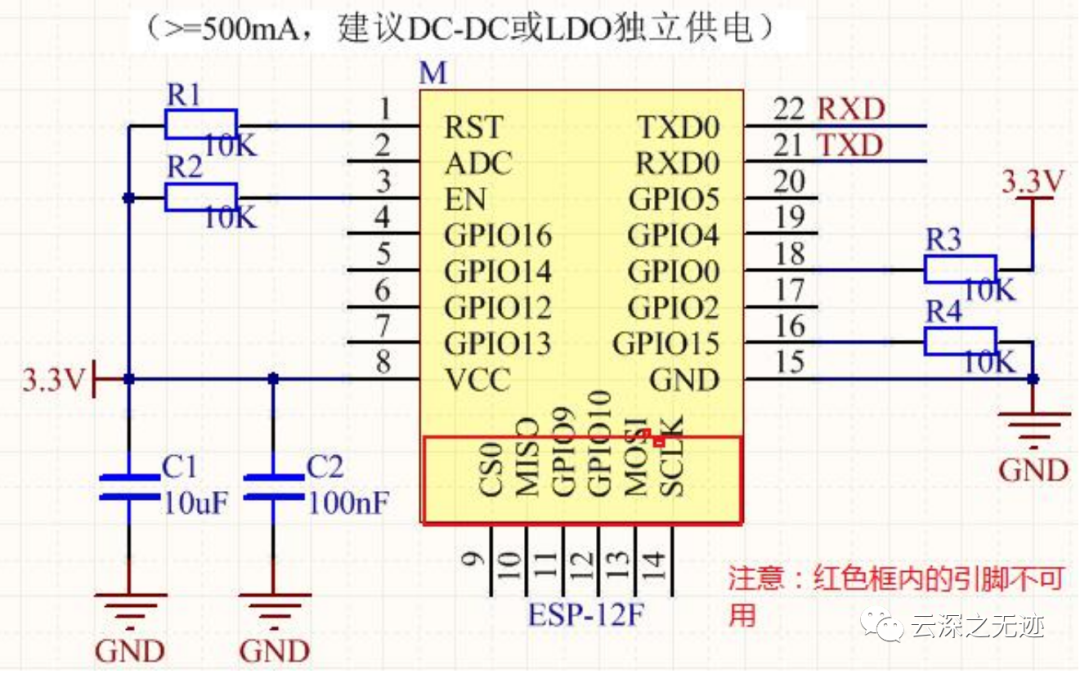
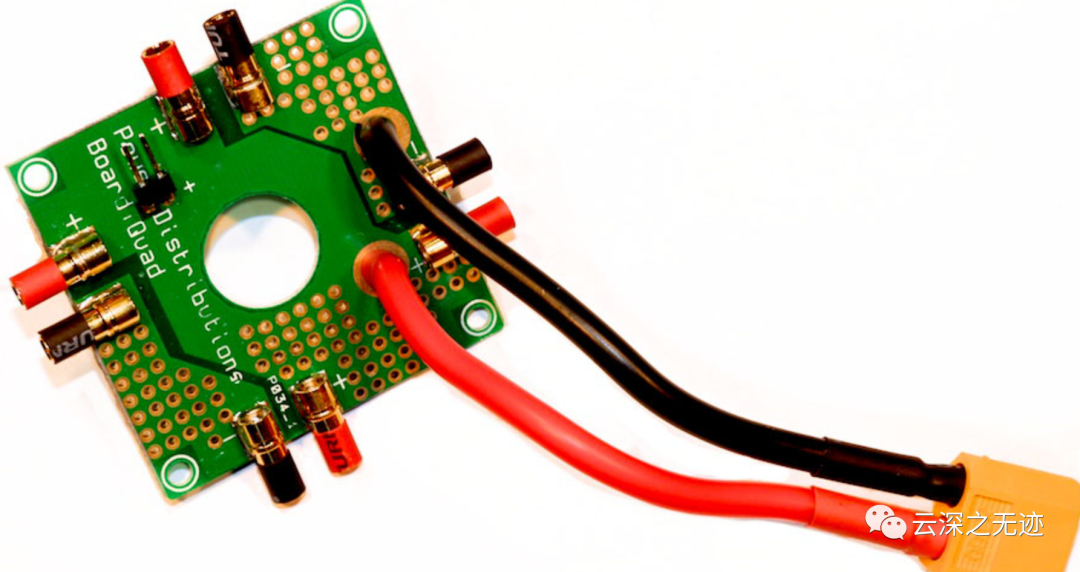
供电设计
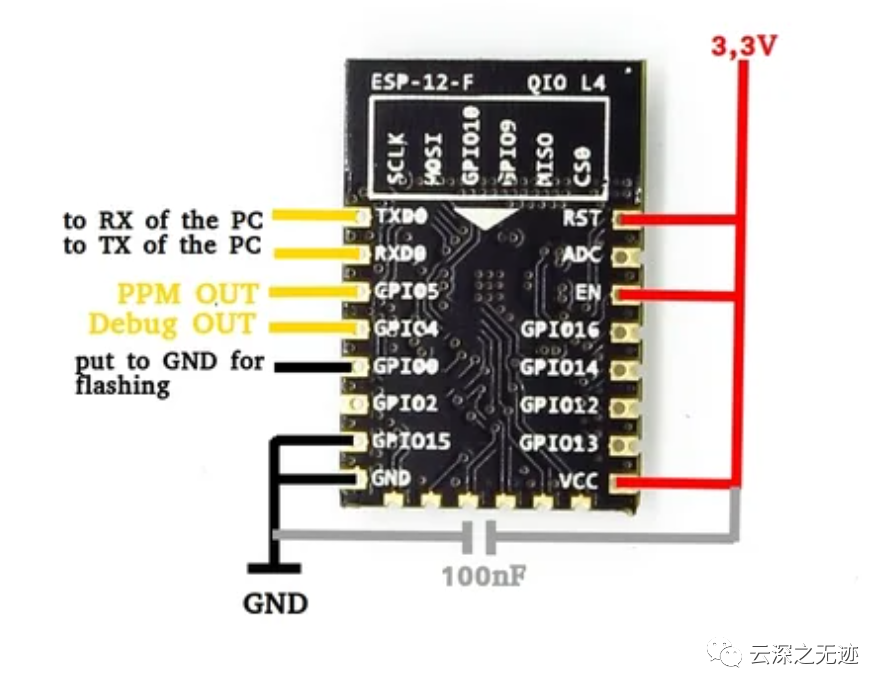
WifiPPM
找到一个有趣的项目:智能手机控制微型室内四轴飞行器。该程序使用 HTML 5 网站启动 wifi 接入点以控制 PPM 信号。PPM 信号由中断产生。
由于 HTML5,可以使用任何智能手机控制您的 RC 设备,而无需任何应用程序。也可以使用 PC 连接到网站并使用操纵杆进行控制。目前这仅适用于 Firefox。
代码在Github了
https://github.com/yunswj/wifi-ppm

可以让你的小飞机变成手机控制
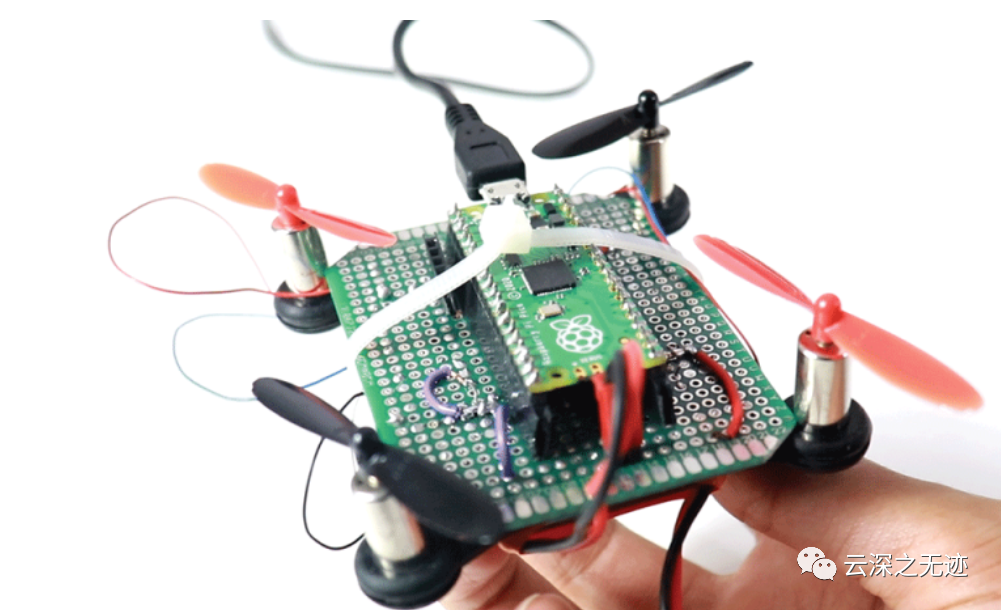
还有Pico做无人机也是可以的
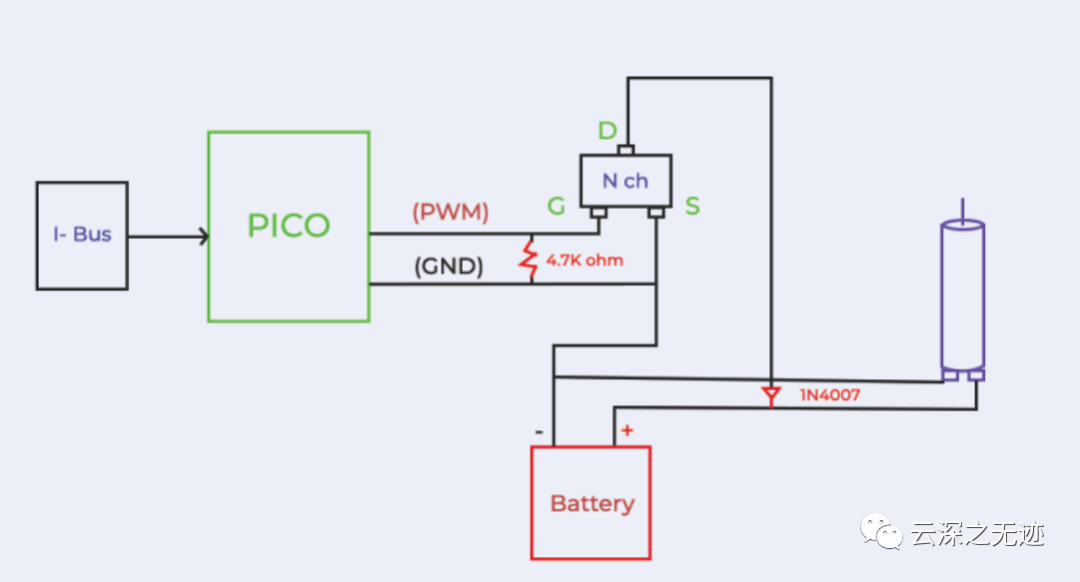
驱动部分
该部分由 n 沟道 MOSFET 组成,它将在其栅极端子上接收来自树莓派 pico 的 PWM 信号。在这些信号的帮助下,MOSFET 将用作开关来打开和关闭电机。
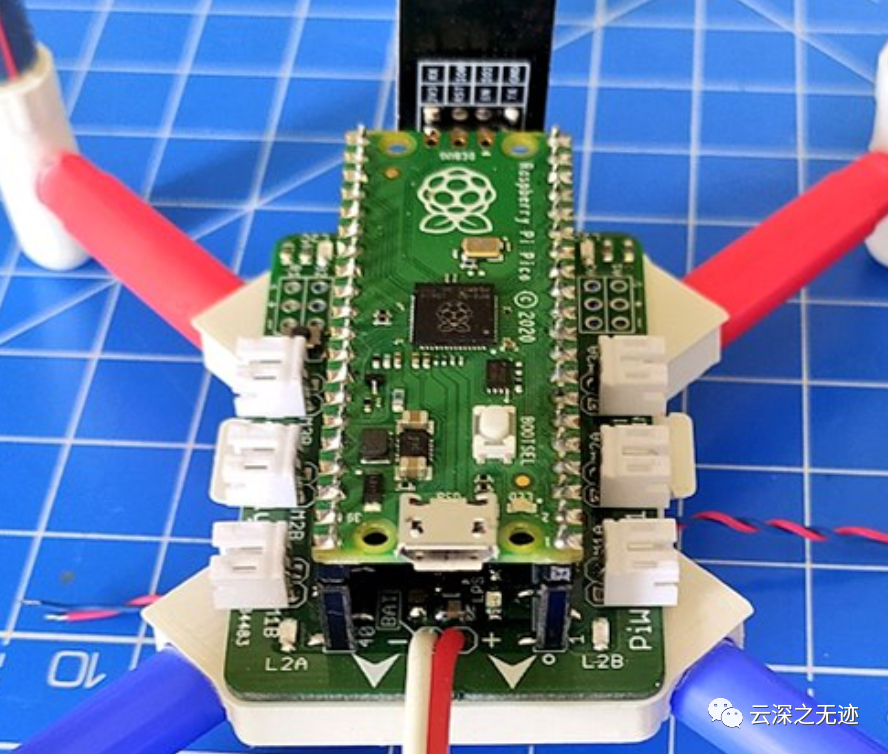
设计的接插件的板子,我也去画一个
这个是用在树莓派的,我在给地平线的板子绘制
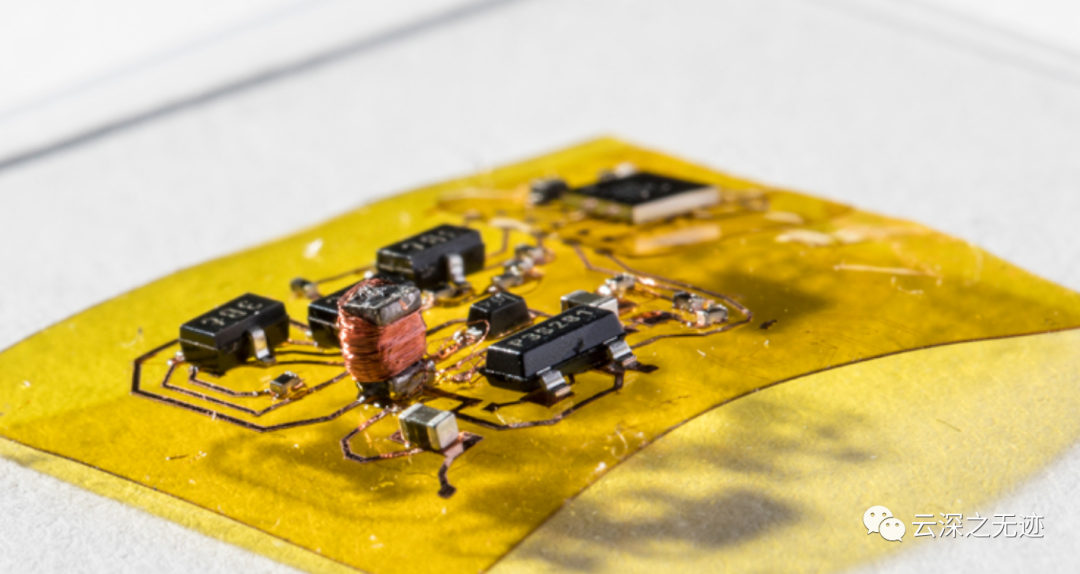
这个是光动力的接收机
上面是硅光电池

这个是Pico直接简版飞行
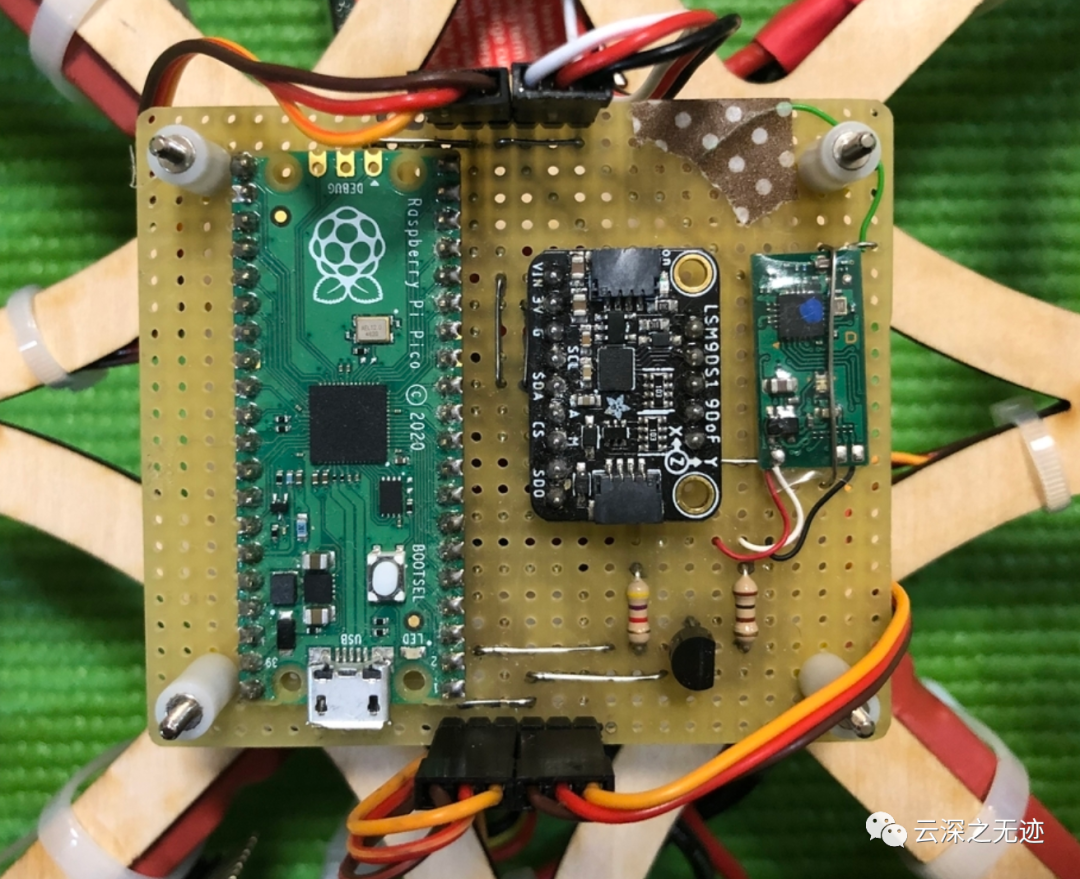
IMU用的是ST家的,我也去买两个
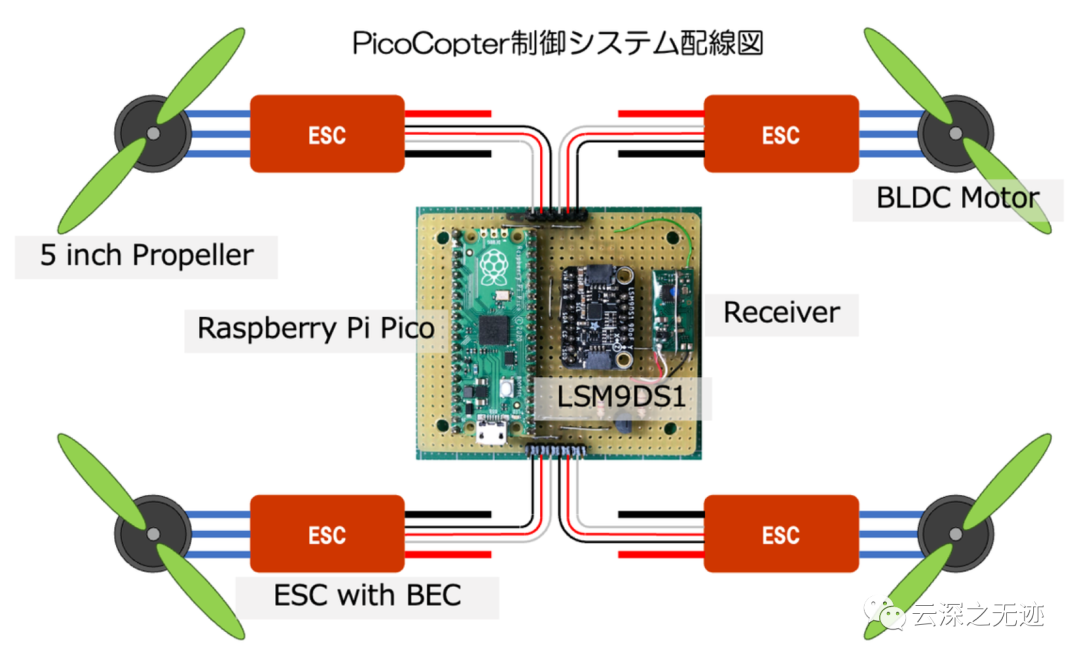
供电
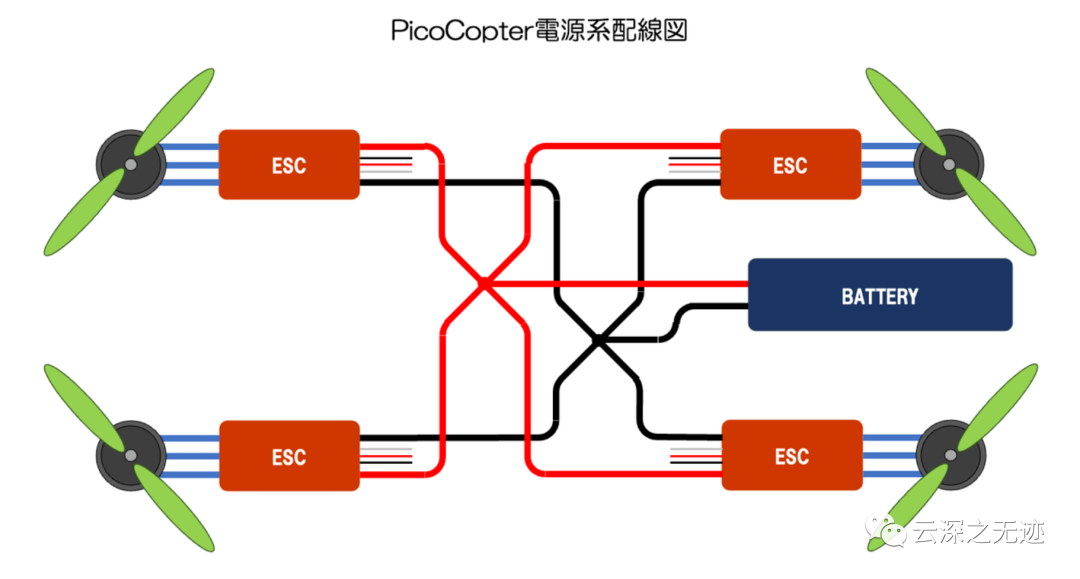
供电
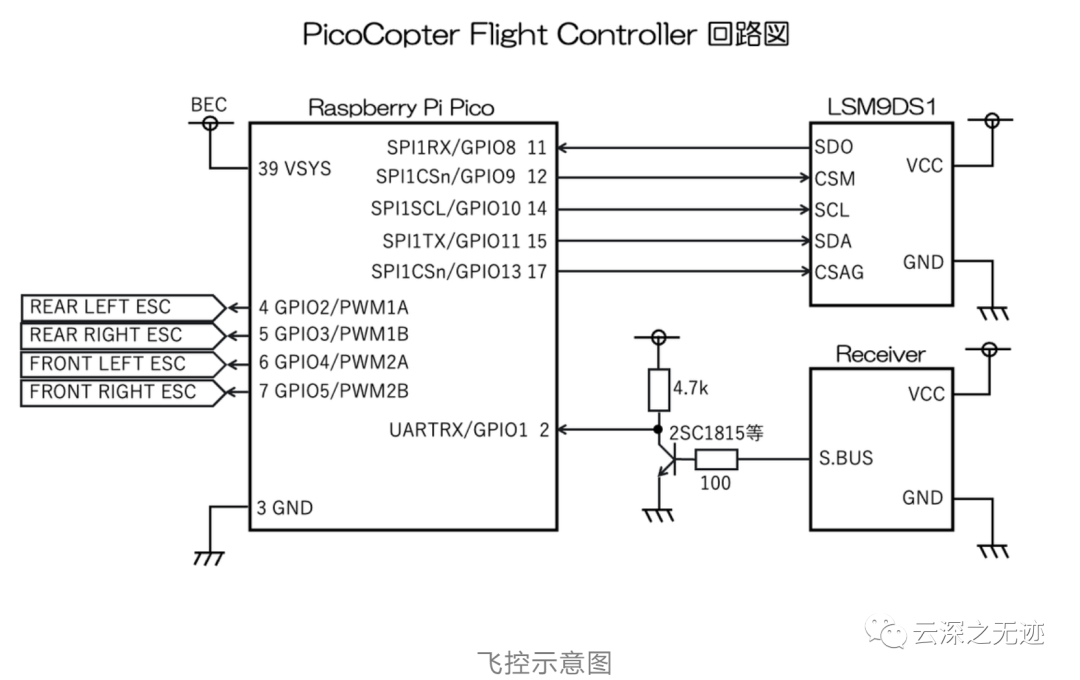
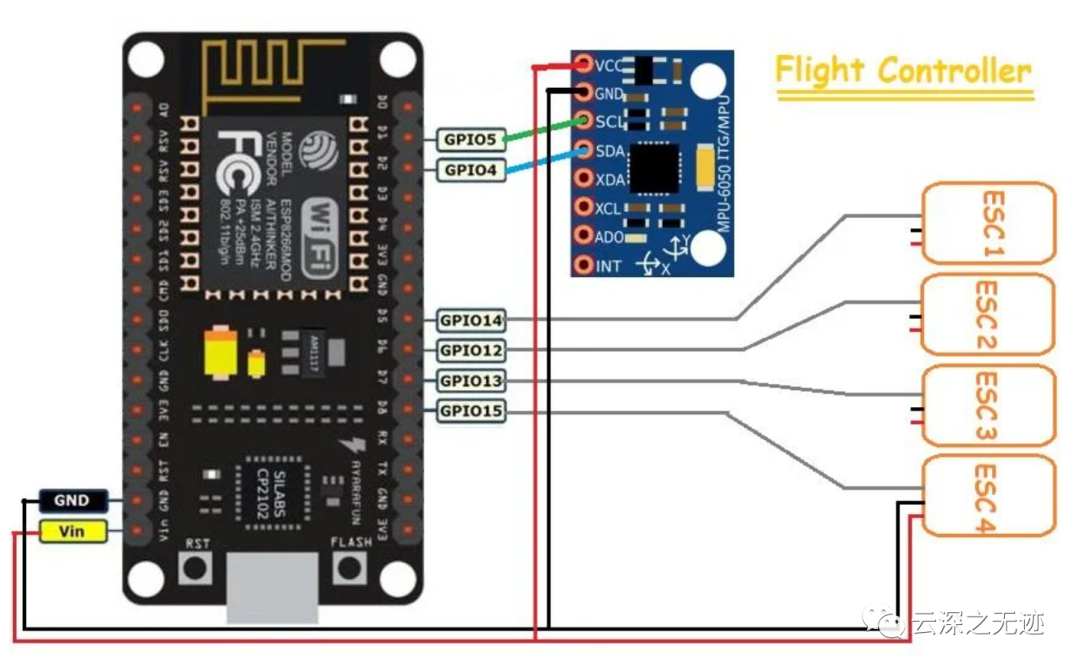
飞控电路图
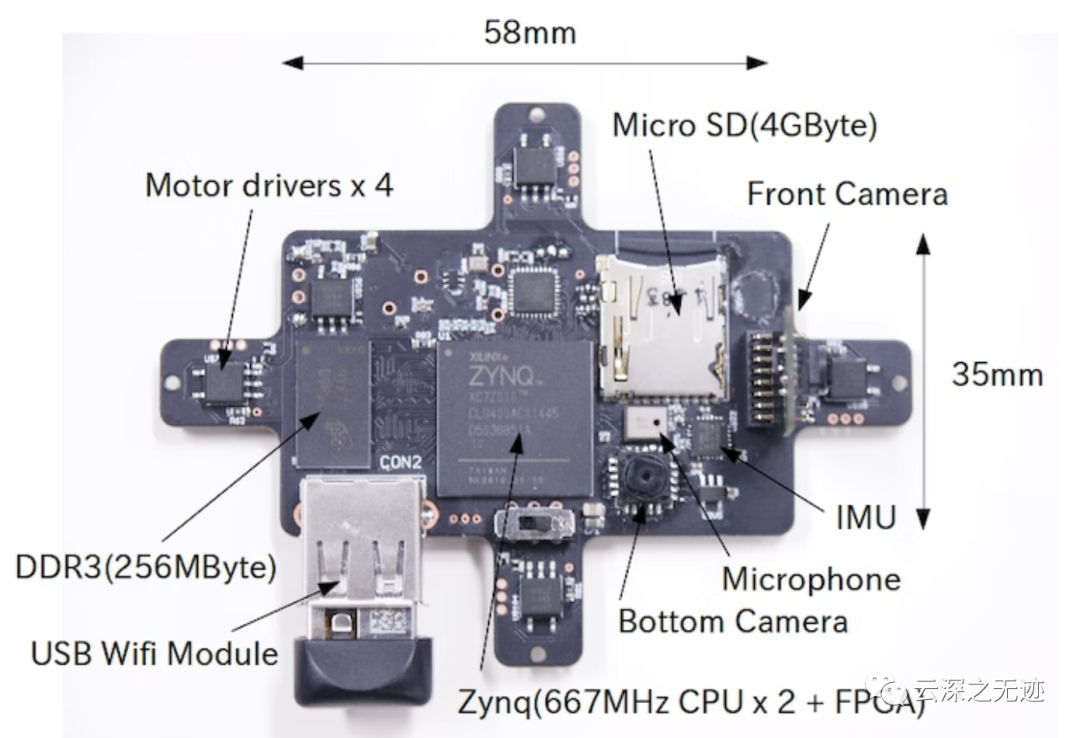
这个是我找的一个FPGA做飞控的板子
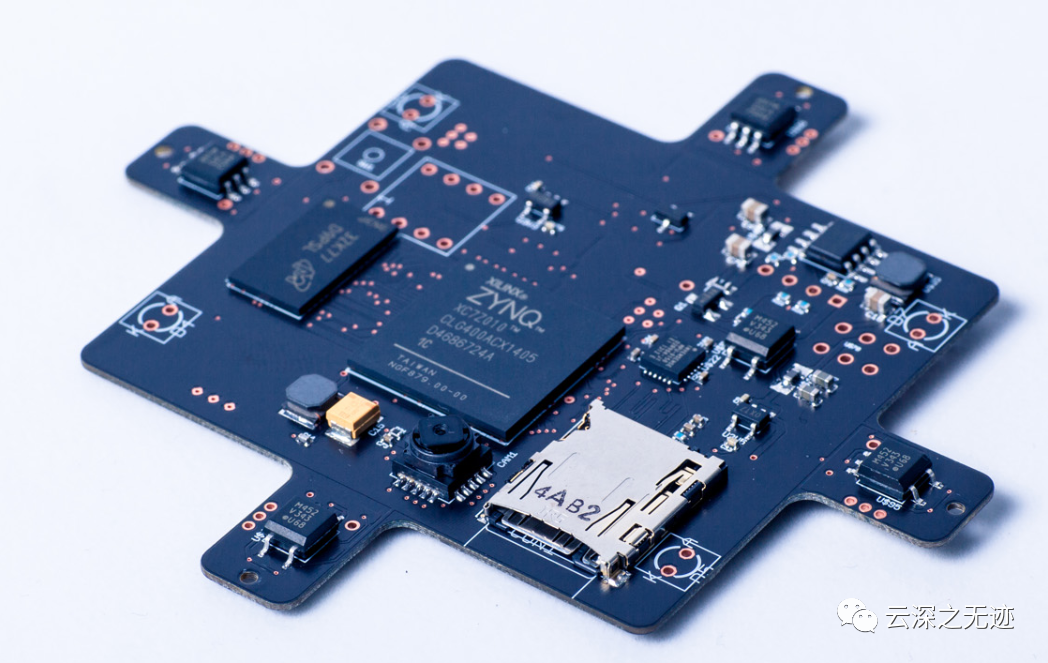
很漂亮啊

不过它众筹的失败了。。。可能大家不理解是啥产品吧
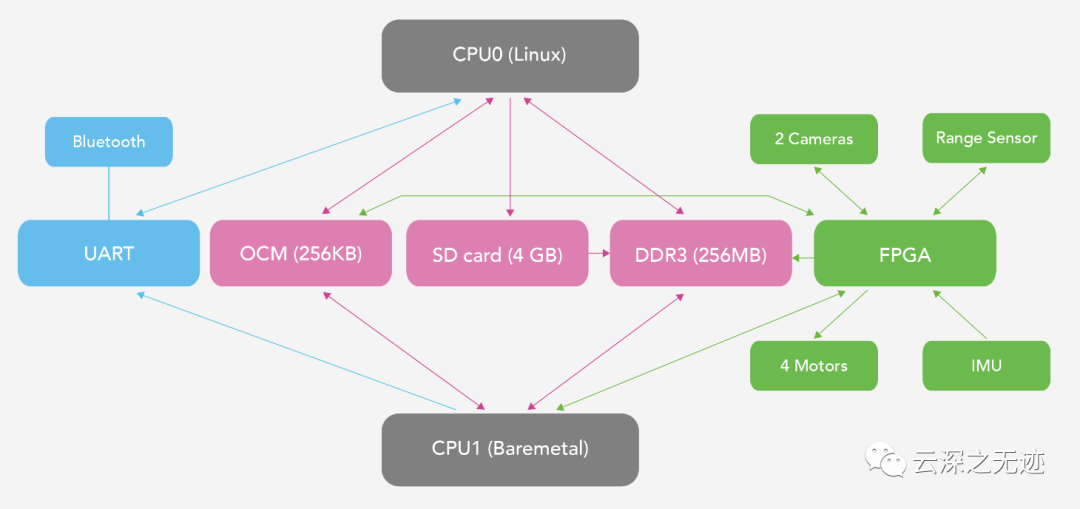
信息流图
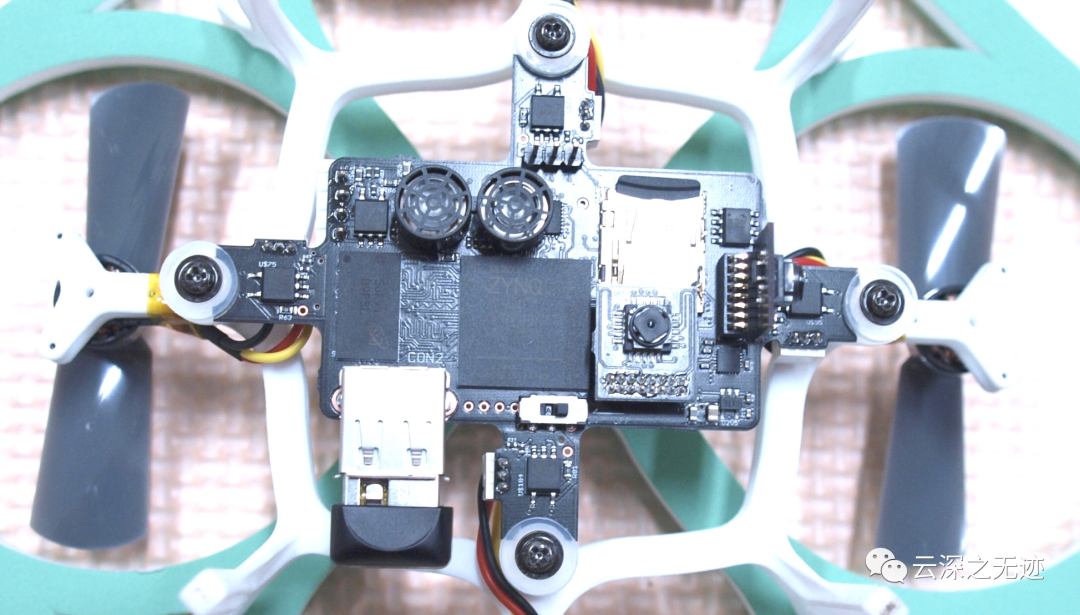
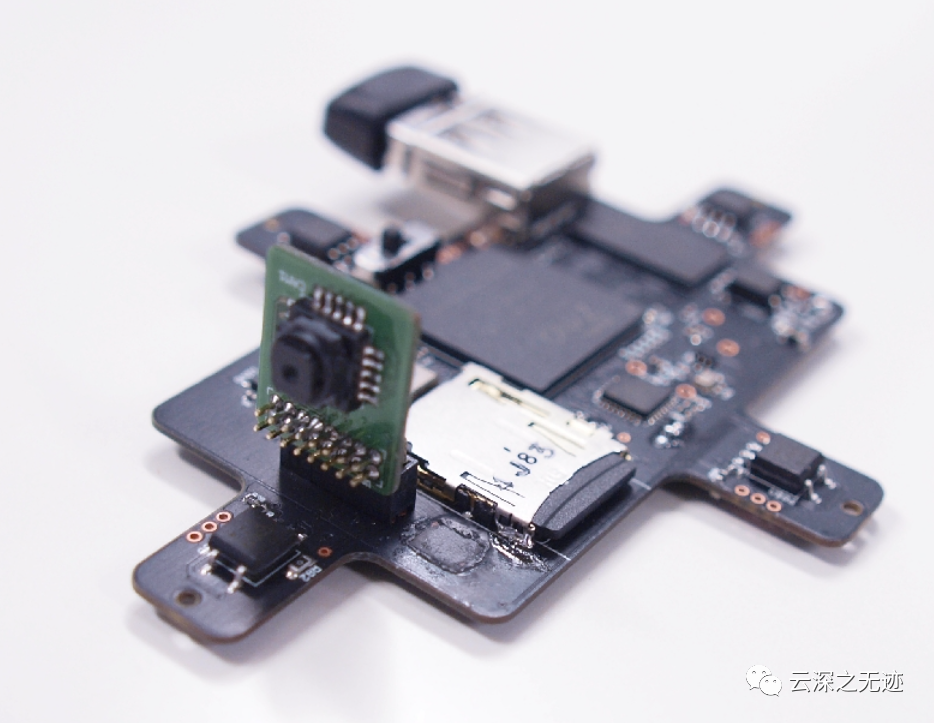
一些细节
太漂亮了

很漂亮
对了,板子的话,如果为了小,还是不要搞大器件设计了,只有单器件才可以很小。
审核编辑 :李倩
-
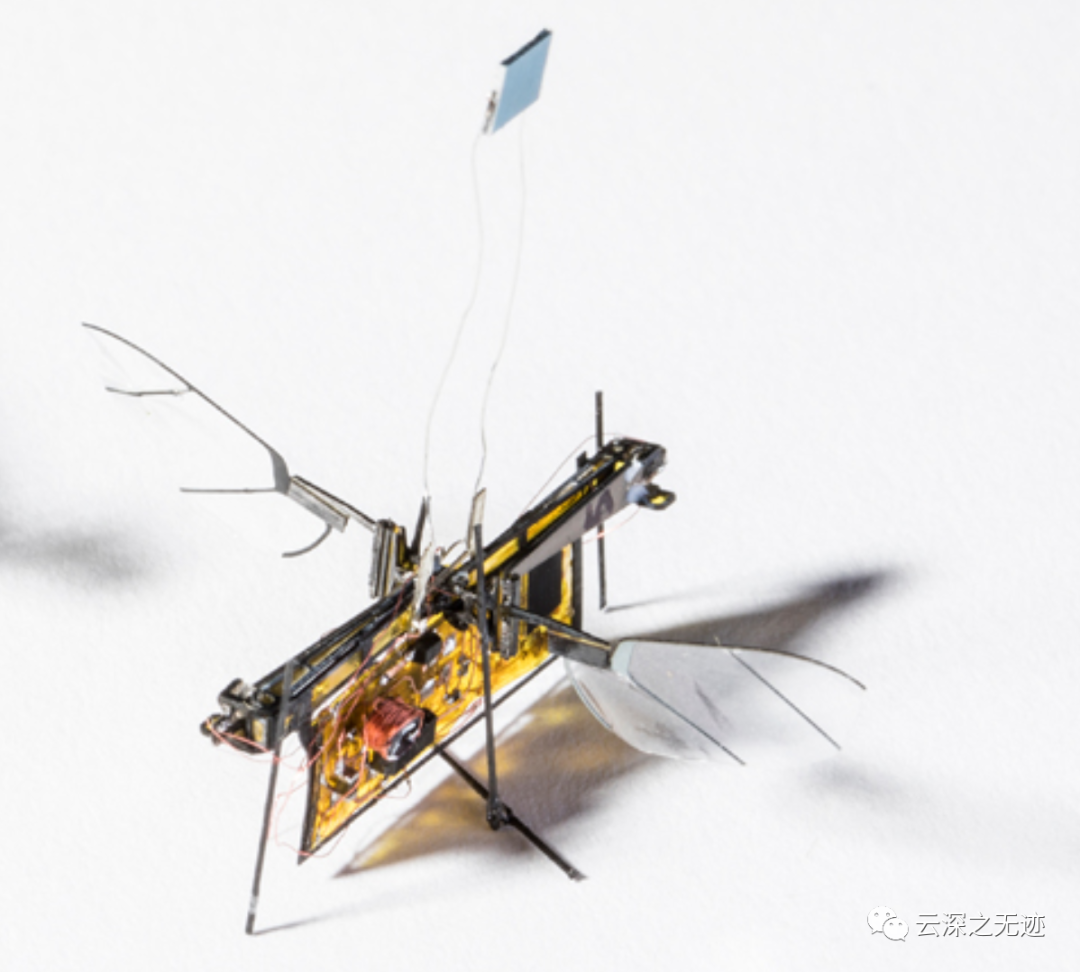
开源项目!用ESP8266 DIY会爬墙的无人机2024-07-04 10317
-
如何使用ESP8266制作无人机飞行控制器2022-10-19 3526
-
制作无人机的小型PCB2022-08-01 2136
-
基于esp8266创建wifi控制无人机2022-07-18 2477
-
ESP8266-DevKitC原理图2022-05-06 1402
-
RoboFly无人机原理图及PCB和测试程序下载2021-12-30 1492
-
Esp8266原理图分享2021-06-18 5980
-
小型开发板WIFI-ESP8266原理图和PCB文件2021-05-11 3735
-
2层ESP8266系统板原理图+PCB文件分享下载2021-03-29 3214
-
用ESP8266和Arduino做智能无人机2020-05-31 3136
-
ESP8266 WIFI模块资料的资料合集免费下载2020-03-27 2107
-
ESP8266的电路原理图免费下载2020-03-13 13160
-
ESP8266开发板的电路和PCB原理图免费下载2019-11-22 6274
-
ESP8266开发板的原理图和PCB图免费下载2019-10-11 13814
全部0条评论

快来发表一下你的评论吧 !
