

一文解析工业机器人系统构成/硬件/程序结构
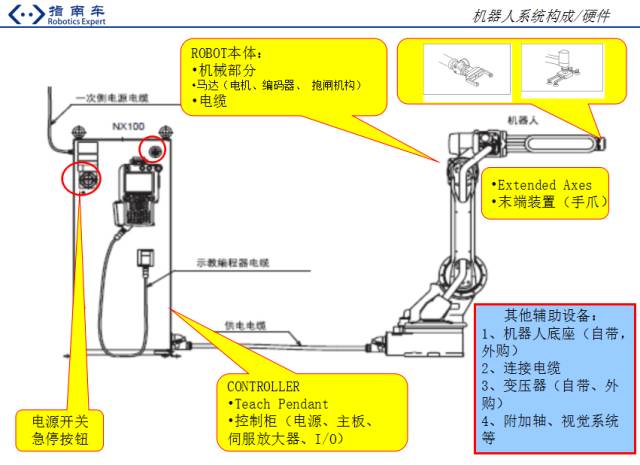
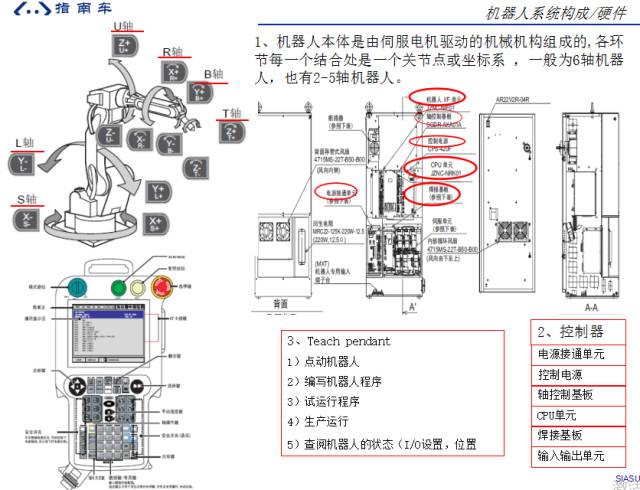
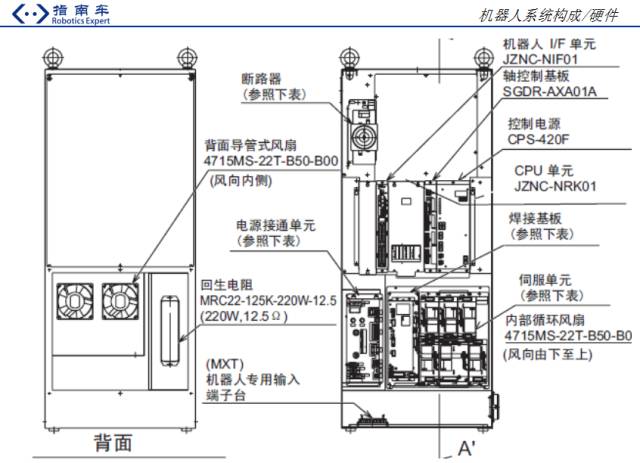
机器人
描述
此文可以作为工业机器人扫盲用,包含品牌,应用,系统构成、硬件、I/O、编程等介绍
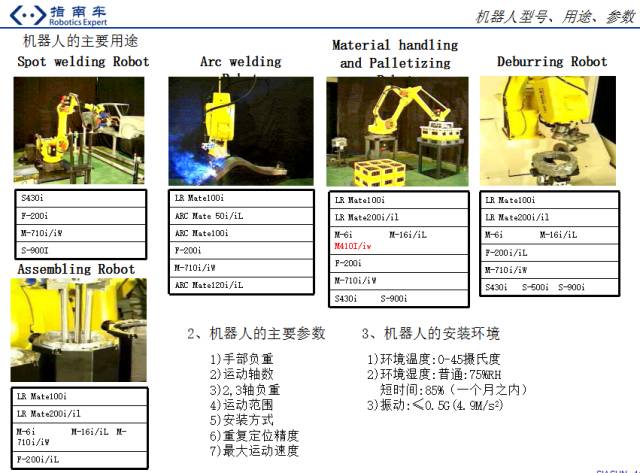
机器人知名品牌:


机器人的软件构成主要有两方面:
一、系统程序,类似于计算机的操作系统,为系统自带,不可更改。
二、用户程序,用户编写的应用程序
1、示教程序(顺序执行)【运动指令、条件判断跳转、输入输出等】
2、CONCURRENT IO程序(内置PLC程序)(循环扫描)【逻辑指令、赋值运算、移位】
编写用户应用程序的工具有两种方式:
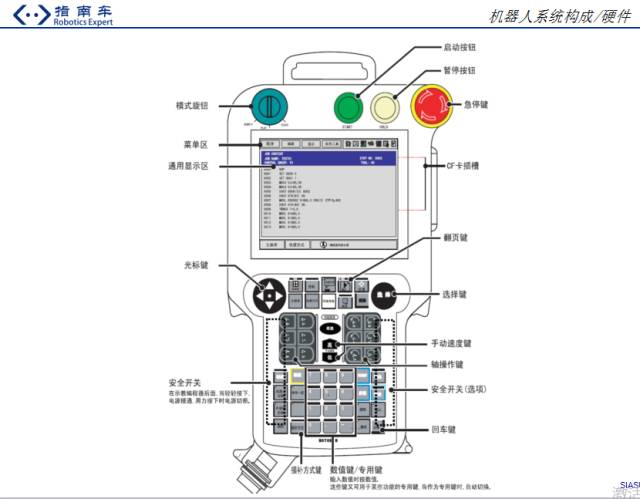
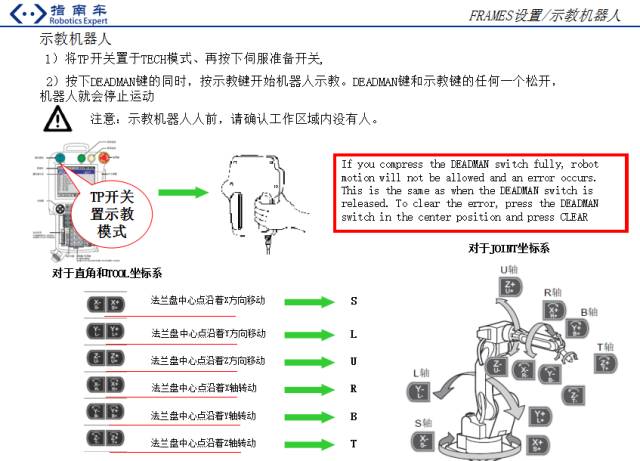
1、在线编程:TEACH PENDANT
2、离线编程:
对于示教程序可以用MOTOSIMEG软件标定
对于内置PLC程序可以直接用文本编辑(*.lst)或MOTOMAN专用梯形图编辑软件。
3、模拟软件:MOTOSIMEG

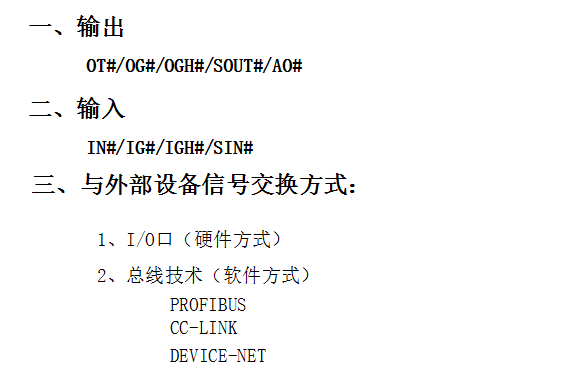
一、一般指令:
1、I/O指令
DOUT/DIN/WAIT/PULSE/AOUT/ARATION/ARATIOF/ANTOUT
2、控制指令
JUMP/CALL/TIMER/*(LABLE)/’(COMMENT)/RET/NOP/PAUSE/CWAIT/MSG/ADVINIT/ADVSTOP/
3、操作指令
CLEAR/INC/DEC/SET/ADD/RET/SUB/MUL/DIV/CNVRT/AND/OR/NOT/XOR/MFRAME/SETE/GETE/GETS/SQRT/SIN/COS/ATAN/MULMAT/INVMAT/SETFILE/GETFILE/SETREG/GETREG/
4、运动指令
MOVJ/MOVL/MOVC/MOVS/IMOV/SPEED/REFP
5、移位指令
SFTON/SFTOF/MSHIFT
6、条件、辅助指令
IF/UNTIL/ENWAIT/
二、特殊应用指令:
1、弧焊指令
ARCON/ARCOF/VWELD/AWELD/ARCSET/WVON/WVOF/ARCCTS/ARCCTE/
2、搬运指令
HAND/HSEN
3、操作指令
CUNCL/SPOT/STROKE/STRWAIT/
4、一般运用指令
TOOLON/TOOLOF
机器人的程序结构:
机器人的程序执行采用的顺序执行结构,与PLC 程序执行有所不同(PLC采用的是循环扫描的执行方式)。
所以机器人的程序结构与一些计算机高级语言的结构和面向硬件的汇编语言结构类似但又有所区别,程序结构主要有以下这几种:
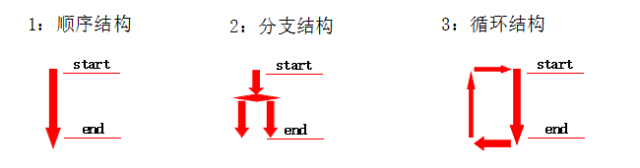
另外:子程序调用、嵌套调用、递归调用、中断等等
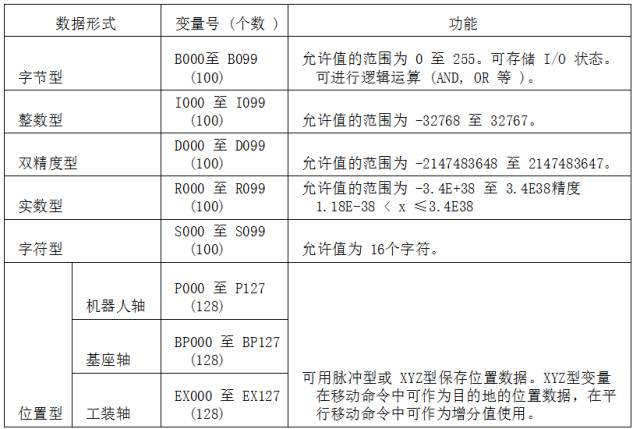
用户变量
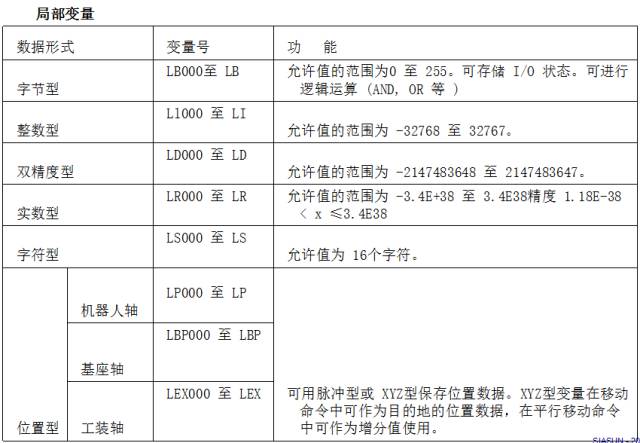
局部变量与用户变量有以下四点不同:
1、只能在一个程序中使用
对于用户变量而言,可在多个程序中定义或使用一个变量;而局部变量只能在定义了局部变量的程序中使用,不能从其他程序读写。而且,因为局部变量不对其他程序造成影响,所以,以 LB001 局部变量为例,可以分别在多个程序中定义并使用。
2、可自由设定使用个数
设定过程在程序信息画面进行,设定了个数后,只有所设定部分保留有内存空间。
局部变量的内容显示要利用用户变量,例:要查看用户变量 LP000 的内容时,要先存入用户变量P001,执行了存储命令后,看P001 的位置型变量画面。命令如下:SET P001 LP000。
3、局部变量的内容仅在定义程序的执行过程中有效
局部变量会在调出定义了局部变量的程序(用CALL 或 JUMP 命令执行程序或“选择程序”)时,保存局部变量的空间。一旦程序执行,则所设局部变量内容在因为RET、 END或 JUMP 命令的执行而脱离该程序时,立刻无效,但是在正在使用局部变量的程序中用CALL 命令调出其他程序,又用RET 命令返回时,则可继续使用执行CALL 命令前的数据内容。
编辑:黄飞
-
ABB机器人的基本程序数据有哪些2024-06-17 3424
-
ABB机器人程序结构总结2023-05-25 9382
-
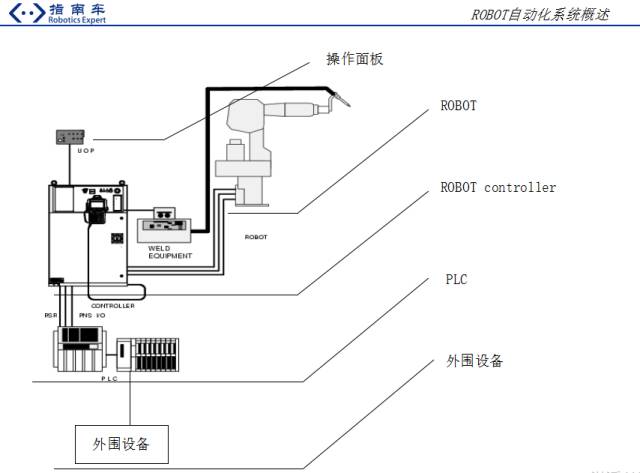
工业机器人的基本构成2023-03-24 5274
-
工业机器人仿真与编程2021-09-07 2433
-
工业机器人组成结构相关资料分享2021-07-05 2743
-
工业喷涂机器人实训系统设计2021-07-01 1931
-
焊接机器人的结构与原理2020-11-16 7915
-
工业机器人的技术原理2018-11-23 5101
-
工业机器人结构、驱动及技术指标详解2018-10-12 2584
-
工业机器人的工作原理2017-12-15 4788
-
工业机器人的产业链2017-08-23 4624
-
《工业机器人》,蒋刚编著的,附下载。2016-06-01 40298
-
如何系统性地学习工业机器人技术?2016-03-06 3499
-
工业机器人的基本结构2015-01-19 9570
全部0条评论

快来发表一下你的评论吧 !
