

开关电源环路补偿设计
电源/新能源
描述
ps:上篇讲述TL431的文章中有点小错误,现更正见下图。
1. 理论讲解
在上一篇文章中我们推导了TL431补偿器的2型传递函数,本文将讲述实际环路补偿的设计步骤。
对于硬件工程师来说,开关电源和运放的信号处理电路是最常遇到的,都是典型的带负反馈的闭环控制系统。因此,这两类电路设计的稳定性和控制理论密切相关。简化的闭环控制系统框图如图1所示,被控对象的传递函数为H,反馈部分的传递函数为G。
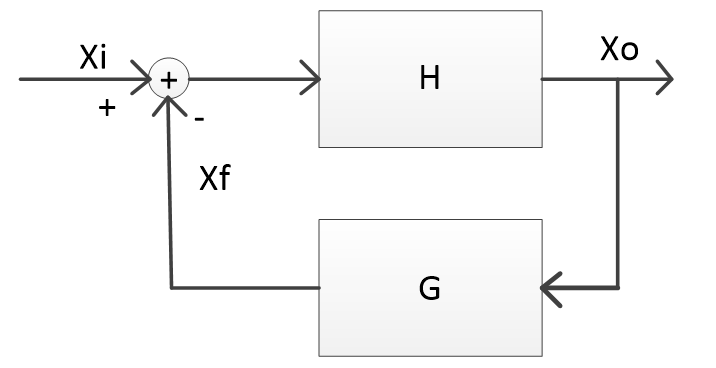
图1

以上各式中的GH一般称为系统的环路增益或者开环增益。
根据式(2)可知,当1+GH=0,即GH=-1时,意味着环路增益为1,相位滞后180°,系统不稳定发生自激振荡。当然也可以从另一个角度进行理解,系统发生自激振荡时,不需要输入量Xi,即净输入量 ,可得GH=-1,即反馈量Xf和输出量Xo形成彼此互相维持的关系。
,可得GH=-1,即反馈量Xf和输出量Xo形成彼此互相维持的关系。
从稳定性条件出发,我们可以知道环路增益小于1时系统可以稳定,相位滞后不到180°时系统可以稳定。这表明左半平面的极点和零点都在某一方面提升稳定性,另一方面降低稳定性。比如左半平面极点可以使增益降低,这能提升稳定性;但是极点增加了相位滞后,这降低了稳定性。比如左半平面零点使相位超前,这能提升稳定性;但是零点使增益增加,这降低了稳定性。只有右半平面零点是最特殊的,增加增益的同时相位滞后,这会加剧系统不稳定。
根据控制理论的稳定性条件可知,相位裕量至少为45°,转化为伯德图的话,就是要求在增益为0dB时的穿越频率处,斜率应该为-20dB/decade,即负20dB每十倍频,或斜率为 ,两者等价。
,两者等价。
根据式(3)可知,当GH>>1时,即引入深度负反馈后,Xf=Xi。这就是为什么运放的虚短需要在引入深度负反馈时才成立的原因。由于运放本身的开环放大倍数H已经非常大,引入负反馈后一般都能满足深度负反馈的要求。
根据式(4)可知,如果想要直流稳态误差为0,则应满足 。这就是为什么控制系统的低频环路增益(开环增益)要尽量大的原因,这点在开关电源环路设计中很重要。
。这就是为什么控制系统的低频环路增益(开环增益)要尽量大的原因,这点在开关电源环路设计中很重要。
对于一般的运放电路而言,图1即是其控制系统框图。而开关电源的系统框图则较为复杂,如图2所示,可以将PWM调制器,开关管和LC滤波器合并统称为功率级,用H表示,误差补偿器用G表示,反馈分压系数用k表示,实际设计中我们经常将k和G合并在一起称为G,则简化后的框图和图1类似,环路增益为GH。另外,实际系统中还经常存在输入扰动和负载扰动,通过线性叠加定理,总输出则可表示为下式:

通过式(5)可以比较清楚地看到输入扰动和负载扰动对输出的影响,输入扰动对应线性调整率指标,负载扰动则对应负载调整率指标。另外通过前述结论我们知道,要想稳态误差越接近于0,则GH直流环路增益应该越大越好。
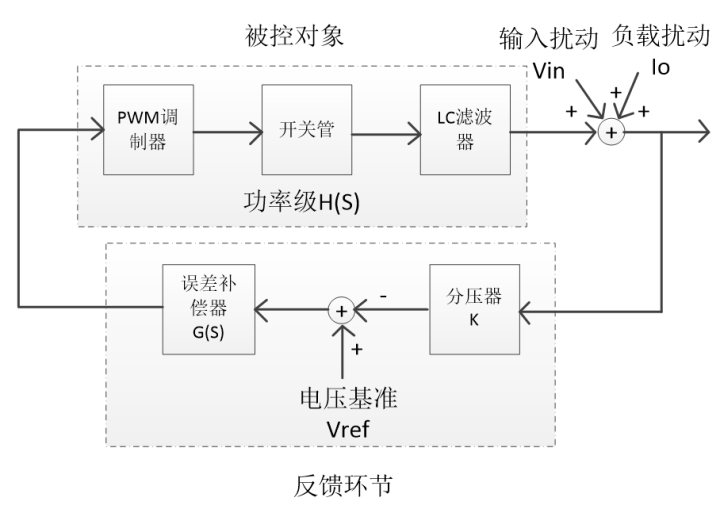
图2
以笔者平常设计中遇到最多的反激式开关电源为例,控制芯片采用的基本都是电流峰值模式。反激式开关电源是从buck-boost拓扑演变而来,拓扑示意如图3所示,该拓扑中所有参数为转化为到副边侧后的等效参数。
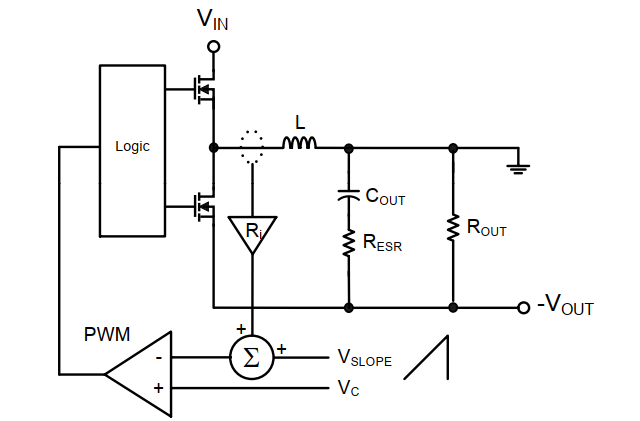
图3
电流模式的的功率级传递函数为:
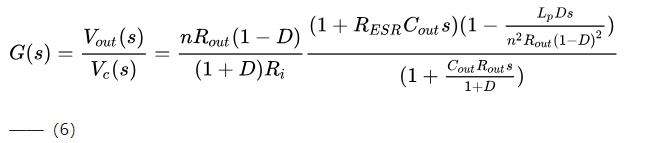
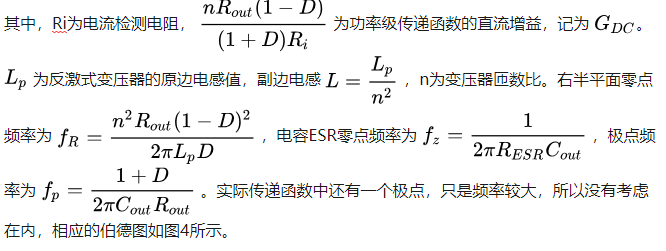
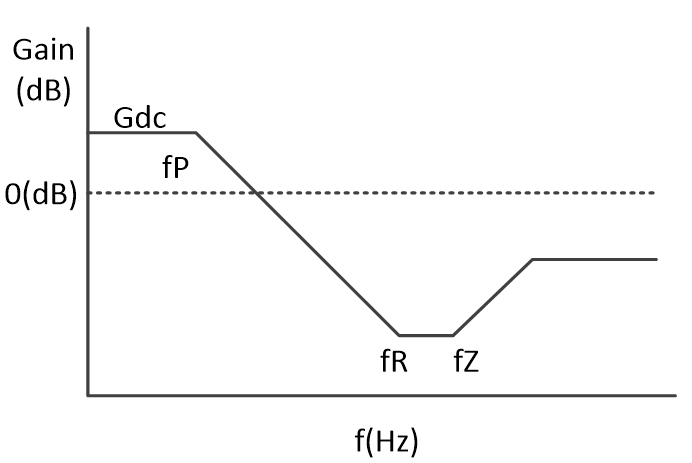
图4
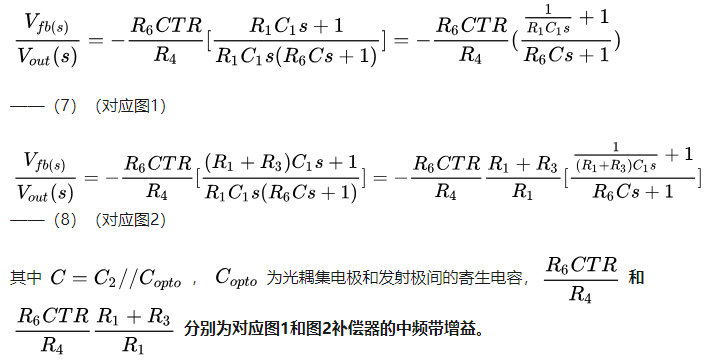
在开头所说的文章中我们已经得到了使用TL431的2型补偿器传递函数,此例采用如图5所示的环路接法,其传递函数为:
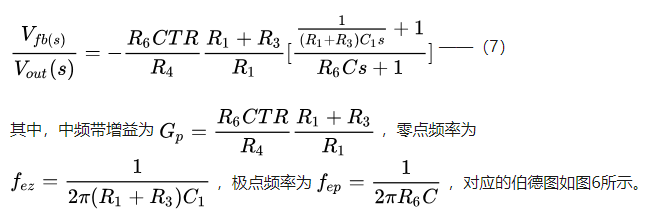

图5
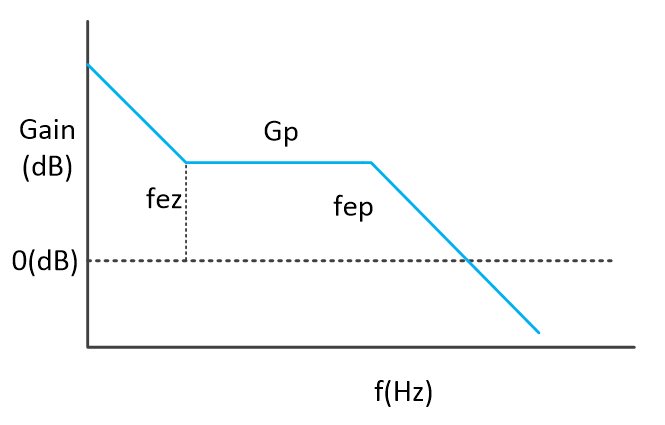
图6
将功率级传递函数和补偿器传递函数的伯德图进行相加叠加,就得到环路增益GH的伯德图,如图7中的橙色曲线所示。

图7
记补偿后的穿越频率为fc(即我们人为想要设置的截止频率,已知),补偿器传递函数的积分器部分的穿越频率为fp0,功率级传递函数的极点(补偿器传递函数的零点)为fp,补偿器的中频带增益为Gp,由于伯德图将传递函数从乘除关系转化为了加减关系,各曲线之间可以通过平移关系进行求解,因此可以推导得出以下结论:
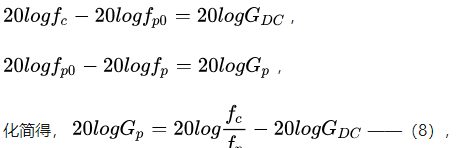
据此求得Gp大小。
当然以上所有推导都基于一个前提条件:电路工作于CCM(连续导通模式)。
设计实例
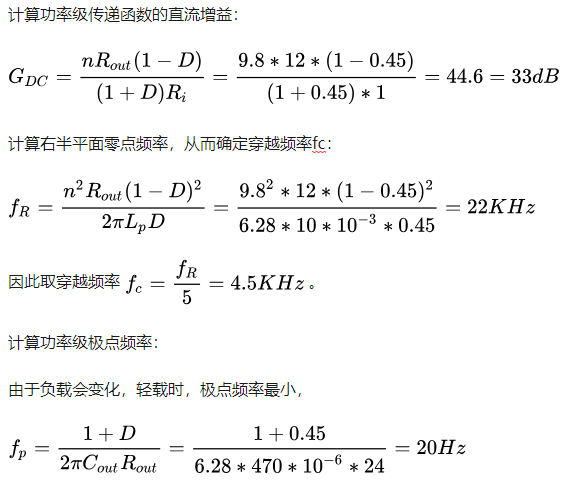
假设设计好完毕功率级的反激电源输出12V,1A(负载12Ω),轻载时电流为0.5A(负载24Ω),输入为220V市电,原边侧电感Lp=10mH,匝数比n=9.8,输出电容为470uF,其ESR=50mΩ,开关频率fs=55KHz,电流检测电阻Ri=1Ω,最大占空比D=0.45。
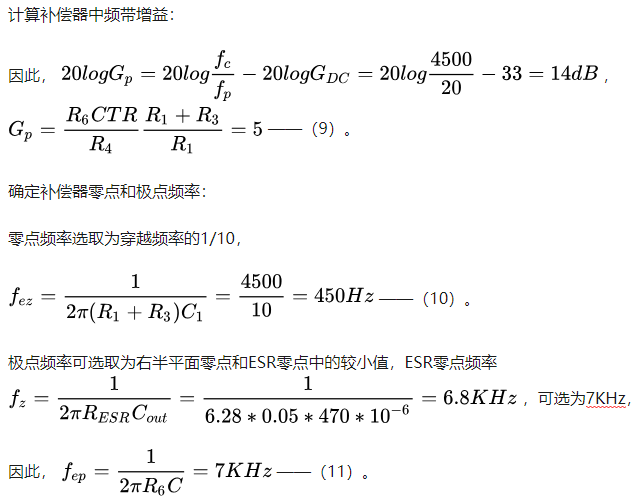
现在我们得到了式(9)(10)(11),根据上篇文章静态工作点的计算方法,假设算的R4=2K,R5=1K,光耦的CTR=1,R6=6K,由于输出12V,基准电压为2.5V,所以可选择R1=15K,R2=3.9K。
因此,根据式(9)可求得:R3=10K。
根据式(10)可求得:C1=14nF,选为15nF。
根据式(11)可求得:C=3.8nF,选为3.9nF。当然最后要根据电路板实测再进行参数调整。
-
【干货分享】开关电源环路补偿设计步骤讲解2025-04-28 493
-
开关电源环路补偿基本概念2023-03-29 3658
-
开关电源环路补偿设计方法(一)2022-12-23 6395
-
开关电源环路补偿的基础知识2022-03-12 6348
-
做开关电源环路补偿2021-10-29 3244
-
开关电源环路补偿--开关电源进阶知识补充12021-10-22 1673
-
开关电源环路补偿2021-10-21 1088
-
开关电源环路补偿.2021-09-18 1850
-
开关电源的环路补偿设计2021-08-20 5769
-
开关电源的环路补偿基础知识资料下载2021-03-30 1249
-
各类开关电源环路补偿设计实例详解,值得一看!2020-07-28 10455
-
开关电源环路补偿的详细资料概述2019-11-06 2331
-
数字开关电源环路补偿2011-11-10 1024
全部0条评论

快来发表一下你的评论吧 !
