

由KUKA外部自动展开的PLC控制程序的分析
描述
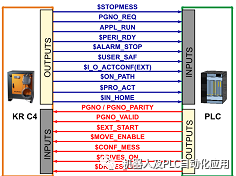
$DRIVES_ON - 驱动装置接通
如果在此输入端上施加了持续至少 20 毫秒的高脉冲,则上级控制系统会接通机器人驱动装置。
$USER_SAF - 操作人员防护装置 / 防护门该输出端在打开护栏询问开关(运行方式 AUT)或放开确认开关(运行方式 T1或 T2)时复位。
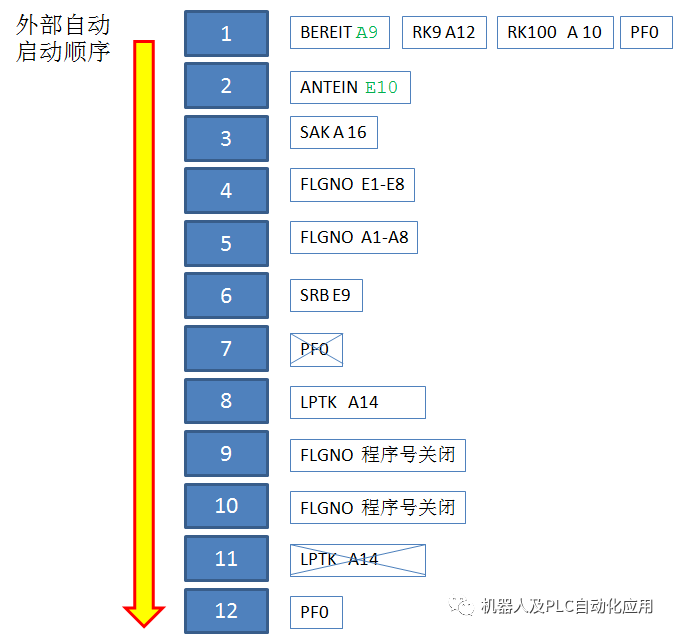
1.KRC-PLC BEREIT ----------1- O_R_Bereit=9 A9机器人准备就绪$RC_RDY1 $OUT[9]
2.KRC-PLC RK9 ----------1- O_R_Auto=12$I_O_ACTCONF$OUT[12]机器人自动模式
3.KRC-PLC RK100 ----------1-O_R_RK100=10 A10机器人控制系统启动RK100=10 $OUT[RK100]=MERK1 ,MERK1=$ALARM_STOP AND $USER_SAF$ALARM_STOP:报警停止,$USER_SAF:安全门监视用户安全 $USER_SAF $OUT[4059]机器人安全信息满足。4.KRC-PLC PF0 ----------1 -$OUT[PF0]=(P0_MERKER OR (DownLoadActive AND ($Mode_OP==#EX))) AND$IN_HOME -$IN_HOME :$OUT[4036]–在FOLGE程序的首部存储当前的轴坐标为初始点VW(#VW_AUE_WAIT,TRUE )
5.PLC-KRC ANTEIN ----------2-I_R_Ant_Ein=10驱动接通 E10
6.KRC-PLC SAK ----------3-O_R_SAK=16在轨迹上$NEAR_POSRET:$OUT[16]
7.PLC-KRC FLGNO ----------4 -PRG_NR $IN[1] TO $IN[8]程序号给入
8.KRC-PLC FLGNO ----------5-PRG_NR_REFL$OUT[1] TO $OUT[8]程序号返回
9.PLC-KRC SRB ----------6-程序启动I_R_SRB=9 -E9
10.KRC-PLC PF0 ----------7 -机器人不在原位
11.KRC-PLC LPTK ----------8–程序到达最后一点LPKT=14-在FOLGE程序中最后执行VW (#VW_AUE_END,TRUE)发出程序在最后1点,等待一段时间后再关闭。
12.PLC-KRC FLGNO ----------9-PRG_NR关闭
13.KRC-PLC FLGNO ----------10- PRG_NR_REFL关闭
14.KRC-PLC LPTK ----------11- 机器人最后一点关闭
15.KRC-PLC PF0 ----------12- 机器人在原位
那么根据机器人外部自动顺序我们的PLC程序应如何处理呢?如下:
FB200_ROB 的SCL程序:
xS_Start:= (bVisuTasten = Byte#6); -WINCC手动驱动按钮
R_TRIG_Antriebe(CLK:= xS_Start); -激活系统在手动模式使机器人有外部驱动
IF R_TRIG_Antriebe.Q THEN
xAnwAntrEin := True;
END_IF;

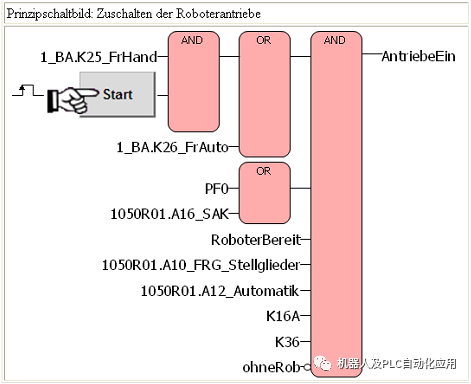
TOF_AntriebeEin(In := ((xAnwAntrEin AND xK25_FrHand) OR xK26_FrAuto)-系统在自动模式下或
-手动给驱动的情况
AND (PF0 OR _ST_ROB.A16_SAK)–机器人在零点或在轨迹上
AND RoboterBereit–机器人准备就绪A9
AND_ST_ROB.A12_Automatik-机器人在自动模式
AND _ST_ROB.A10_FRG_Stellglieder–机器人允许控制
AND NOT AnwORob–没有又选择不带机器人
AND NOT xAntrVerz -驱动有了为1,判断驱动是否已经接通(用于防止闪断)
,PT:= T#750ms);-延时断开750ms
条件不满足时,如果机器人的A10RK100没有的话, 使能断开后要 在750Ms后再次给E10才能使机器人有使能 。
下降沿的控制:---用于监控一旦一个条件没有满足就将激活下降沿。
F_TRIG_AntriebeEin(CLK := ((xAnwAntrEin AND xK25_FrHand) OR xK26_FrAuto)
AND (PF0 OR _ST_ROB.A16_SAK)
AND RoboterBereit
AND _ST_ROB.A12_Automatik
AND _ST_ROB.A10_FRG_Stellglieder
AND NOT AnwORob
AND NOT xAntrVerz);
例如:断开安全门时 激活下降沿。
IF F_TRIG_AntriebeEin.Q THEN 出现条件不满足将激活判断变量
xAntrVerz := True;
END_IF;
例如:断开安全门时
TON_AntriebeEin(IN := xAntrVerz AND NOT TOF_AntriebeEin.Q ,PT := T#2s)-----监视接通
当条件再次满足时需要2S的时间才能再次接通。
当需要再次接通时需要等待2S之后
IF TON_AntriebeEin.Q THEN 用于接通
xAntrVerz := False;
END_IF;
AntriebeEin := TOF_AntriebeEin.Q;-发出E10 给机器人驱动接通
审核编辑 :李倩
-
PLc模糊控制程序设计2015-04-08 5438
-
步进电机控制程序(PLC控制)2008-10-10 1607
-
多种液体水位自动混合控制程序设计与调试2009-06-14 1791
-
单片机按键控制程序【汇编版】2015-12-29 1014
-
多舵机控制程序2016-03-21 932
-
PLC控制LED灯数码显示控制程序2016-05-19 3794
-
施耐德PLC程序(水电站检修排水控制程序)2016-11-08 936
-
火车PLC控制程序和触摸屏_PLC编程实例项目例程2022-05-13 1024
-
基于送料小车自动控制程序2017-12-20 991
-
编制PLC时序控制程序的方法及典型应用介绍2019-06-17 12084
-
如何进行PLC控制程序的设计详细资料PPT说明2019-07-28 7516
-
由KUKA外部自动展开的PLC控制程序的分析2020-06-12 3644
-
直流无刷电机控制程序2021-09-28 2526
-
快速掌握PLC控制程序的设计2023-03-17 996
-
FMEA控制程序2024-10-10 506
全部0条评论

快来发表一下你的评论吧 !
