

半桥驱动芯片IR2104S典型电路设计方案
接口/总线/驱动
描述
在H桥驱动电路中,一共需要4个MOS管。而这四个MOS管的导通与截止则需要专门的芯片来进行控制,即要介绍的半桥/全桥驱动芯片。
所谓半桥驱动芯片,便是一块驱动芯片只能用于控制H桥一侧的2个MOS管:1个高端MOS和1个低端MOS。因此采用半桥驱动芯片时,需要两块该芯片才能控制一个完整的H桥。
相应的,全桥驱动芯片便是可以直接控制4个MOS管的导通与截止,一块该芯片便能完成一个完整H桥的控制。
这里使用的IR2104便是一款半桥驱动芯片,因此在原理图中可以看到每个H桥需要使用两块此芯片。
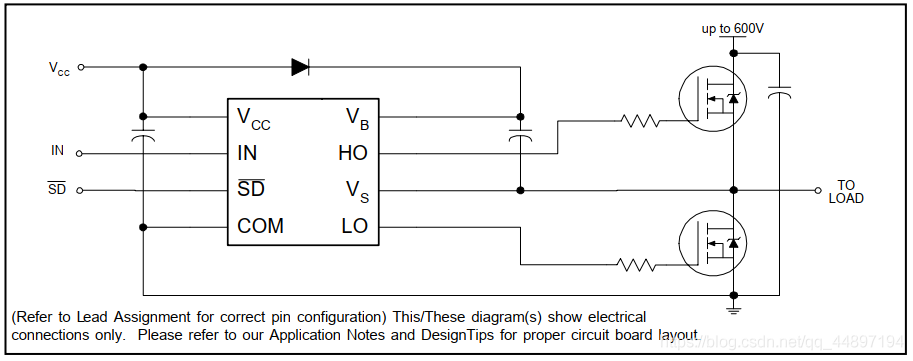
1 典型电路设计
2 引脚功能
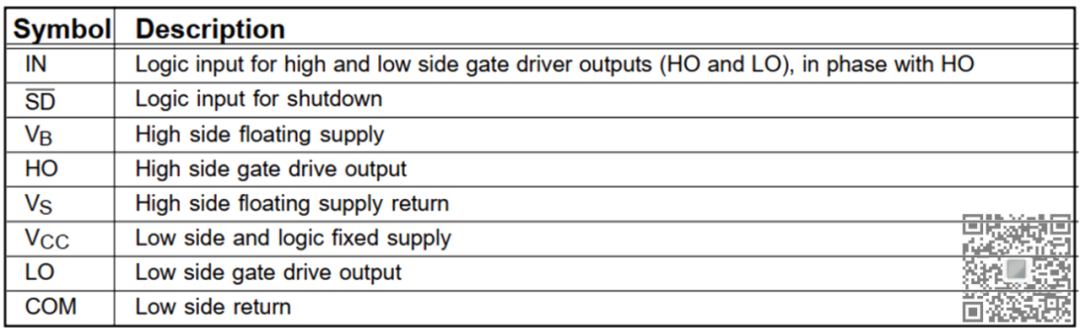
VCC为芯片的电源输入,手册中给出的工作电压为10~20V。(这便是需要boost升压到12V的原因)
IN和SD作为输入控制,可共同控制电机的转动状态(转向、转速和是否转动)。
VB和VS主要用于形成自举电路。(后续将详细讲解)
HO和LO接到MOS管栅极,分别用于控制高端和低端MOS的导通与截止。
COM脚直接接地即可。
3 自举电路
此部分是理解该芯片的难点,需要进行重点讲解。从上面的典型电路图和最初的设计原理图中均可发现:该芯片在Vcc和VB脚之间接了一个二极管,在VB和VS之间接了一个电容。这便构成了一个自举电路。
作用:在高端和低端MOS管中提到过,由于负载(电机)相对于高端和低端的位置不同,而MOS的开启条件为Vgs>Vth,这便会导致想要高端MOS导通,则其栅极对地所需的电压较大。
补充说明:因为低端MOS源极接地,想要导通只需要令其栅极电压大于开启电压Vth。而高端MOS源极接到负载,如果高端MOS导通,那么其源极电压将上升到H桥驱动电压,此时如果栅极对地电压不变,那么Vgs可能小于Vth,又关断。因此想要使高端MOS导通,必须想办法使其Vgs始终大于或一段时间内大于Vth(即栅极电压保持大于电源电压+Vth)。
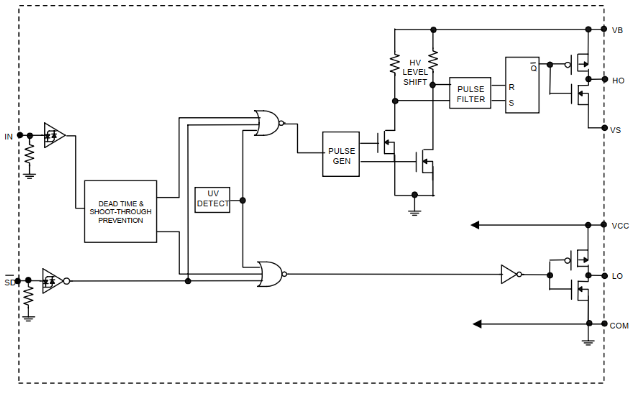
首先看下IR2104S的内部原理框图(来源于数据手册)。此类芯片的内部原理基本类似,右侧两个栅极控制脚(HO和LO)均是通过一对PMOS和NMOS进行互补控制。
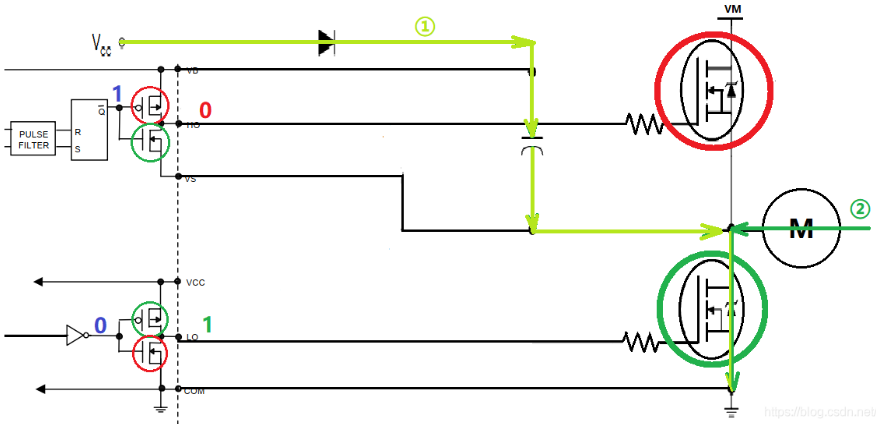
自举电路工作流程图
以下电路图均只画出半桥,另外一半工作原理相同因此省略。
假定Vcc=12V,VM=7.4V,MOS管的开启电压Vth=6V(不用LR7843的2.3V,原因后续说明)。
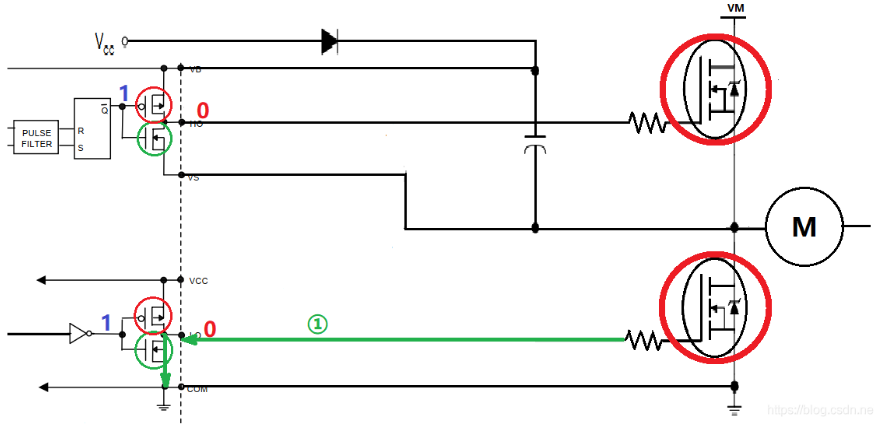
第一阶段: 首先给IN和SD对应的控制信号,使HO和LO通过左侧的内部控制电路(使上下两对互补的PMOS和NMOS对应导通),分别输出低电平和高电平。此时,外部H桥的高端MOS截止,低端MOS导通,电机电流顺着②线流通。同时VCC通过自举二极管(①线)对自举电容充电,使电容两端的压差为Vcc=12V。
第二阶段: 此阶段由芯片内部自动产生,即死区控制阶段(在H桥中介绍过,不能使上下两个MOS同时导通,否则VM直接通到GND,短路烧毁)。HO和LO输出均为低电平,高低端MOS截止,之前加在低端MOS栅极上的电压通过①线放电。
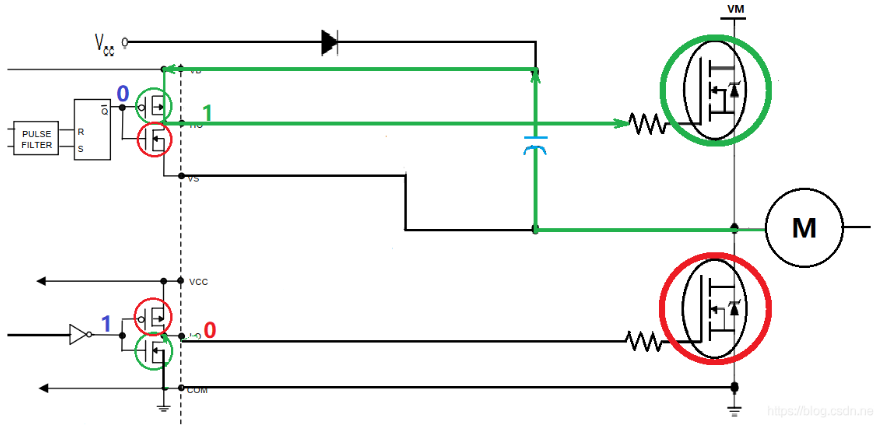
第三阶段: 通过IN和SD使左侧的内部MOS管如图所示导通。由于电容上的电压不能突变,此时自举电容上的电压(12V)便可以加到高端MOS的栅极和源极上,使得高端MOS也可以在一定时间内保持导通。此时高端MOS的源极对地电压≈VM=7.4V,栅极对地电压≈VM+Vcc=19.4V,电容两端电压=12V,因此高端MOS可以正常导通。
此时,自举二极管两端的压差=VM,因此在选择二极管时,需要保证二极管的反向耐压值大于VM。
注意:因为此时电容在持续放电,压差会逐渐减小。最后,电容正极对地电压(即高端MOS栅极对地电压)会降到Vcc,那么高端MOS的栅源电压便≈Vcc-VM=12V-7.6V=4.4V < Vth=6V,高端MOS仍然会关断。
补充总结: 因此想要使高端MOS连续导通,必须令自举电容不断充放电,即循环工作在上述的三个阶段(高低端MOS处于轮流导通的状态,控制信号输入PWM即可),才能保证高端MOS导通。自举二极管主要是用来当电容放电时,防止回流到VCC,损坏电路。
但是,在对上面的驱动板进行实际测试时会发现,不需要令其高低端MOS轮流导通也可以正常工作,这是因为即使自举电容放电结束,即高端MOS的栅源电压下降到4.4V仍然大于LR7843的Vth=2.3V。 那么在上述驱动板中,自举电路就没有作用了吗?当然不是,由于MOS管的特性,自举电路在增加栅源电压的同时,还可令MOS管的导通电阻减小,从而减少发热损耗,因此仍然建议采用轮流导通的方式,用自举电容产生的大压差使MOS管导通工作。
4 控制逻辑
时序控制图:
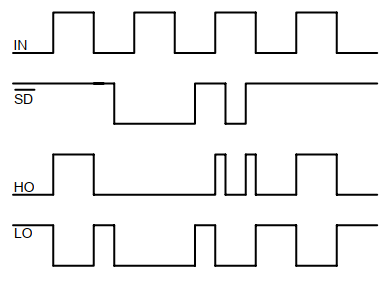
简单看来,就是SD控制输出的开关(高电平有效),IN控制栅极输出脚的高低电平(即H桥MOS管的开关)。 在最上面的驱动板中,SD接到VCC,即处于输出常开状态。只需要对IN脚输入对应控制信号即可进行电机的驱动。
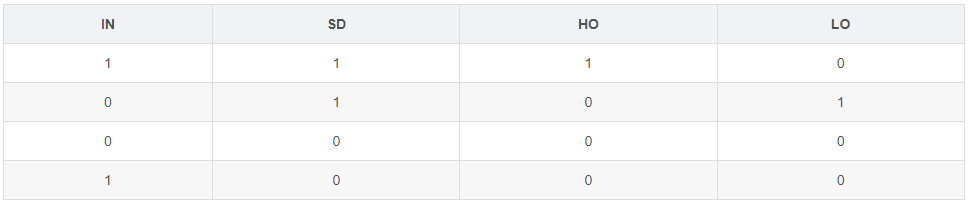
上面为半桥的驱动方式,驱动一个H桥要同时对两个IR2104进行控制。 以上面设计的电机驱动板为例,驱动真值表:

改变PWM的占空比,即可改变电机的转速。
编辑:黄飞
-
 fang_gao
2024-12-27
0 回复 举报Vcc为5V,MOS驱动电压VM为24V可以不? 收起回复
fang_gao
2024-12-27
0 回复 举报Vcc为5V,MOS驱动电压VM为24V可以不? 收起回复
-
 jf_87151140
2023-01-18
0 回复 举报OK 收起回复
jf_87151140
2023-01-18
0 回复 举报OK 收起回复
-
关于IR2104S半桥驱动的原件选取2016-01-24 5247
-
请教大家一个关于半桥驱动电路的问题2017-04-20 11545
-
怎么区分IR2104S是原装2017-07-15 5004
-
SLM2110S 600V 2A 逆变电源半桥驱动芯片 PIN对PIN代替IR2110S IR2113S2018-08-24 5399
-
SLM2104S 600V IGBT/MOS管半驱动动IC 封装SOP8 IR2104S2018-09-07 2840
-
IR2104半桥HO输出异常2018-11-27 6393
-
电路驱动电机,老是烧驱动芯片IR2104S?2018-12-11 8587
-
分享一种基于IR2llO芯片的高频感应加热电源驱动电路设计方案2021-07-26 2268
-
关于对IR2104电机半桥驱动的见解2021-09-06 4006
-
ir2104中文资料详细(ir2104引脚图_特点和技术参数及驱动电路)2018-03-04 252385
-
高频感应加热电源驱动电路设计方案2021-11-06 2771
-
半桥驱动器ir2104中文数据手册2022-05-16 2796
-
ir2104驱动芯片代换料ID7U603SEC-R1 600V半桥预驱方案2023-03-29 3939
-
ir2104全桥驱动电路原理2024-01-05 12477
-
LM2104:高效半桥驱动芯片的技术剖析与应用指南2026-01-07 678
全部0条评论

快来发表一下你的评论吧 !
