

焊接机器人的结构有哪些?
电子说
描述
焊接机器人的结构有哪些?焊接机器人是由机器人本体、控制柜、电源、焊枪、送丝结构、示教器、传感器以及辅助设备焊接变位机和安全系统组成的。接下来无锡金红鹰,专业工业机器人集成商将为大家详细介绍。
焊接机器人本体就是指工业机器人的机械部分,又叫操作机,是工业机器人的操作机构,是指工业机器人的原样和自身。整体机器人还其它的配套软件和配套设备组成。焊接机器人本体基本结构由五部分组成:
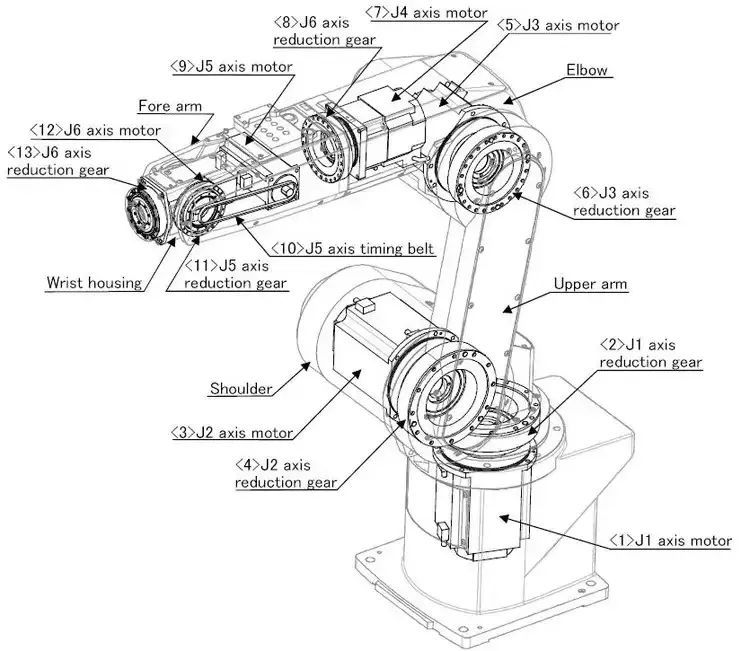
焊接机器人本体结构
1、传动部件;
2、机身及行走机构;
3、臂部;
4、腕部;
5、手部。
焊接机器人控制柜组成
焊接机器人控制柜是操作者向焊接机器人下达指令使其按照要求工作时需要将指令转变成焊接机器人能够识别的信号的控制系统。一般由主电源、计算机供电单元、计算机控制模块(计算机主体部分)、输入和输出板(I/O板)、用户连接端口、示教器接线端(Flexpendant)接口、各轴计算机板、各轴伺服电机的驱动单元等组成。一个焊接机器人控制系统最多包含36个驱动单元,那么一个驱动模块最多包含9个驱动单元,可处理6个内部轴和2个普通轴或者附加轴,这要根据机器人的型号来确定。
焊接机器人控制柜内的标准硬件主要有控制模块,其主要包含控制操纵器动作的主要计算机,包括RAPID的执行和信号处理。一个控制模块可以连接至1~4个驱动模块。驱动模块包含电子设备的模块,它可为操纵器的电机供电,驱动模块最多可以包含9个驱动单元,每个单元控制一个操纵器关节,标准焊接机器人有6个轴因此有六个关节,所以每个焊接机器人操纵器通常使用一个驱动模块。
电源:包括焊接电源、焊枪等。
焊枪:熔化极气体保护焊的焊枪按照冷机器人焊枪却方式可分为气冷式焊枪和水冷式焊枪两类。(水冷比气冷多了水循环冷却水管,其余部分结构基本相同,在此主要介绍气冷式焊枪)熔化极气体保护焊所使用的焊枪一般是自动焊枪,是指装配在工业机器人上使用的焊枪,按照其在机器人机械轴上的装配方式,分为外置式和内置式两种。
1)外置式气冷自动焊枪结构
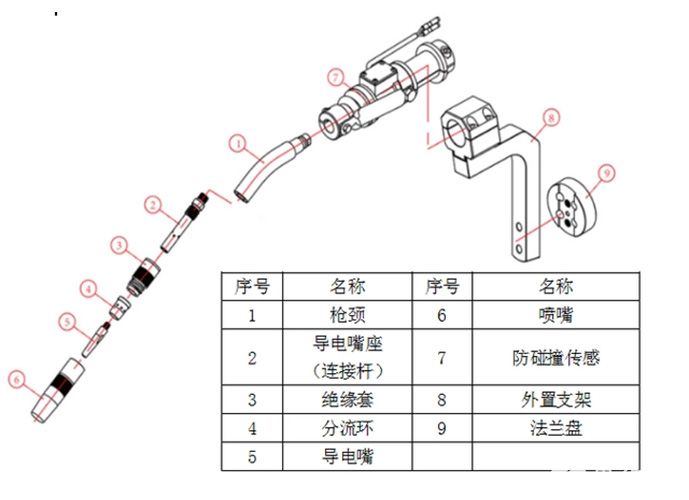
外置式气冷自动焊枪结构
2)内置式气冷自动焊枪结构
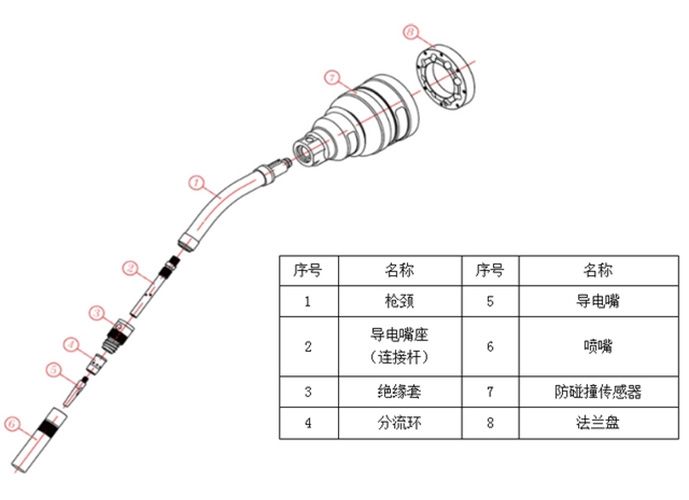
内置式气冷自动焊枪结构
送丝结构:自动送丝机是在微电脑控制下,可以根据设定的参数连续稳定的送出焊丝的自动化送丝装置。送丝机一般有控制部分提供参数设置,驱动部分在在控制部分的控制下进行送丝驱动,送丝嘴部分将焊丝送到焊枪位置。
示教器:示教器是进行焊接机器人的手动操纵、程序编写、参数配置以及监控用的手持装置。由使能按钮、手动操作、单轴运动功能构成。
传感器:传感器是焊接机器人的感知系统,是焊接机器人最重要的组成部分之一。为了向机器人提供最详细的外部环境信息,可以将具有不同功能的多个传感器组合起来,为机器人提供最详细的外部环境信息。
焊接机器人传感器按用途可分为内部传感器和外部传感器。其中内部传感器装在操作机上,包括位移、速度、加速度传感器,是为了检测机器人操作机内部状态,在伺服控制系统中作为反应信号。
外部传感器,如视觉、触觉、力觉距离等传感器,是为了检测作业对象及环境与机器人的联系。
焊接变位机:作为焊接机器人辅助设备,焊接变位机能够辅助机器人完成焊接作业,可实现水平回转和360度翻转,实现工件的多方位焊接,有助于提升机器人焊接效率提高焊接质量。
安全系统:是确保焊接机器人安全作业的系统,常见的有安全围栏等。
无锡金红鹰工业自动化有限公司是专业的焊接机器人集成商,从业20余年,具备成熟的设计、生产能力,兼具销售和售后一站式服务,如果您对我们的产品或服务感兴趣请联系我们。
审核编辑:汤梓红
-
焊接机器人的结构组成是什么?2020-03-20 2580
-
焊接机器人的结构与原理2020-11-16 7913
-
工业焊接机器人实训平台介绍2021-07-01 3038
-
ABB焊接机器人伺服电机维修常见故障有哪些?2021-09-30 2349
-
焊接机器人及其应用2016-08-03 1506
-
焊接机器人及系统介绍(焊接机器人系统组成和编程方法及发展趋势)2018-02-28 29923
-
焊接机器人的焊接参数有什么影响2019-10-15 6598
-
工业焊接机器人有哪些优势2021-08-19 2679
-
焊接机器人的分类介绍2021-09-03 6690
-
管道焊接机器人概述、结构及特点2022-06-30 7780
-
钢结构行业如何选择焊接机器人2023-01-30 1746
-
焊接机器人有什么优点?2023-04-13 3037
-
如何选购焊接机器人2023-07-05 1965
-
什么是焊接机器人?有什么特点和优点?2023-07-07 5287
-
焊接机器人的分类与应用2023-08-16 3113
全部0条评论

快来发表一下你的评论吧 !
