

传感器的7大感应方式介绍
MEMS/传感技术
描述
01
接近感应
接近感应通常意味着检测:
a、是否存在物体。
b、对象的大小或简单形状。
接近传感器在操作中可以进一步分为接触式或非接触式,以及模拟或数字。传感器的选择取决于物理,环境和控制条件。其中包括:
机械:
可以采用任何合适的机械/电气开关,但是由于操作机械开关需要一定的力,所以通常使用微型开关。
气动:
这些接近传感器通过破坏或扰乱气流来工作。气动接近传感器是接触式传感器的示例。但这些产品不能用于可能被吹走的轻型部件。
光学:
在最简单的形式中,光学接近传感器通过断开光束而落下,该光束落在诸如光电池的光敏装置上。这些是非接触式传感器的示例。
值得注意的是,这些传感器的照明环境必须格外小心,例如,光学传感器可能会因电弧焊过程中的闪光而被遮蔽,空气中的灰尘和烟云可能会阻碍光的传输等。
电气:
电接近传感器可以是接触式或非接触式。简单的接触式传感器通过使传感器和组件形成完整的电路来进行操作。非接触式电接近传感器依赖于感应原理来检测金属或依靠电容来检测非金属。
范围感应:
距离感测涉及检测组件距离感测位置有多近或远,尽管它们也可以用作接近传感器。距离或距离传感器使用非接触式模拟技术。使用电容,电感和磁技术进行几毫米至几百毫米之间的短距离感测。使用各种类型的已发射能量波(例如,无线电波,声波和激光)执行更远距离的感应。
02
力感测
可能需要感应的力有六种。在每种情况下,力的施加可以是静态的(静止的),也可以是动态的。力是矢量,因为它必须同时在大小和方向上指定。因此,力传感器是模拟操作,并且对其作用方向敏感。六种力量是:
①、拉力
②、压缩力
③、剪力
④、扭转力
⑤、弯曲力
⑥、摩擦力
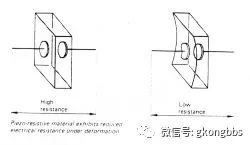
存在用于感测力的多种技术,一些是直接的,一些是间接的。 拉伸力: 可以由应变计确定,当长度增加时,它们会显示出其电阻的变化。这些量规测量的电阻变化可以转化为力,因此是间接装置。 压力: 可以通过称为称重传感器的设备来确定,这些设备可以“通过检测压缩负载下电池尺寸的变化,或者通过检测负载下电池内压力的增加,或者通过在压缩负载下电阻的变化来运行”加载。 扭转力: 可以看作是拉伸力和压缩力的组合,因此可以采用上述技术的组合。 摩擦力:
这些涉及要限制运动的情况,因此“通过使用力和运动传感器的组合间接检测摩擦力。例如:
03
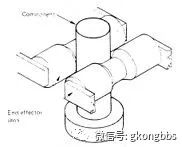
触觉感应
触感是指通过触摸进行感测。最简单的触觉传感器类型使用以行和列排列的简单触摸传感器阵列,这些通常称为矩阵传感器。
每个单独的传感器与物体接触时都会被激活。通过检测哪些传感器处于活动状态(数字)或输出信号的大小(模拟),可以确定组件的印记。然后将压印与先前存储的压印信息进行比较,以确定组件的大小或形状。
目前已实现机械,光学和电子触觉传感器。
04
热感
作为过程控制的一部分或作为安全控制手段,可能需要进行热感应。有多种方法可供选择,这些方法的选择主要取决于要检测的温度。
一些常见的方法是:双金属条,热电偶,电阻温度计或热敏电阻。对于涉及低水平热源的更复杂的系统,可以使用红外热像仪。
05
声音感应(听力)
声学传感器可以检测并有时区分不同的声音。它们可用于语音识别,以发出口头命令或识别异常声音,例如爆炸。最常见的声学传感器是麦克风。
在工业环境中,声学传感器的明显问题是大量的背景噪声。
当然,我们也可以简单地将声学传感器调整为仅对某些频率做出响应,从而使它们能够区分不同的噪声。
06
气体感应(气味)
对特定气体敏感的气体或烟雾传感器依赖于传感器中所含材料的化学变化,化学变化会产生物理膨胀或产生足够的热量来触发开关设备。
07
机器人视觉(瞄准器)
视觉可能是当前机器人感觉反馈研究中最活跃的领域。
机器人视觉是指通过某种相机实时捕获图像并将该图像转换为可以由计算机系统分析的形式。这种转换通常意味着将图像转换成计算机可以理解的数字场。图像捕获,数字化和数据分析的整个过程应足够快,以使机器人系统能够响应分析的图像并在执行任务集期间采取适当的措施。
机器人视觉的完善将使人工智能在工业机器人上的全部潜能得以发挥。它的用途包括检测存在,位置和移动,识别和识别不同的组件,样式和特征。
但是,即使是最简单的视觉技术也需要大量的计算机内存,并且可能需要相当长的处理时间。
编辑:黄飞
-
感应位置传感器和电路的常见问题的解答2021-02-26 5164
-
BLDC无位置传感器控制方式介绍2025-12-30 16451
-
磁感应传感器有什么种类?2019-10-25 3936
-
HC-SR505人体红外感应传感器特点介绍2021-12-07 7089
-
介绍一款SPI通讯方式的传感器2022-01-24 1085
-
介绍传感器数据的读取2022-02-11 1165
-
磁感应式传感器由什么组成2019-07-08 16280
-
磁感应传感器的应用场合2019-10-12 7432
-
光传感器的封装方式介绍2021-02-02 4428
-
传感器的7大感应方式介绍2021-03-22 4602
-
传感器的限位感应是如何做到的2022-05-24 2795
-
磁感应接近传感器 BIM-UNTK-AN7X2023-04-21 997
-
激光位移传感器怎么用?激光位移传感器安装方式2023-08-24 6455
-
感应器传感器工作原理 感应器传感器怎么安装接线的2024-02-14 10171
-
传感器有几种感应方式?2025-01-16 1429
全部0条评论

快来发表一下你的评论吧 !
