

ProCon M多任务框架应用案例分析
工业控制
描述
随着智能装备的发展,机器的功能越来越复杂,但是核心的功能的控制精度和速度要求越来越高。而这两个需求有时候是相互矛盾的。比如被誉为现代机器— —“神经网络”的EtherCAT总线,用户就不得不设定更长的EtherCAT周期。
因此我们推出了 ProCon M多任务框架,用户可以根据应用需求使不同的CPU核心执行完全独立的机器控制任务。
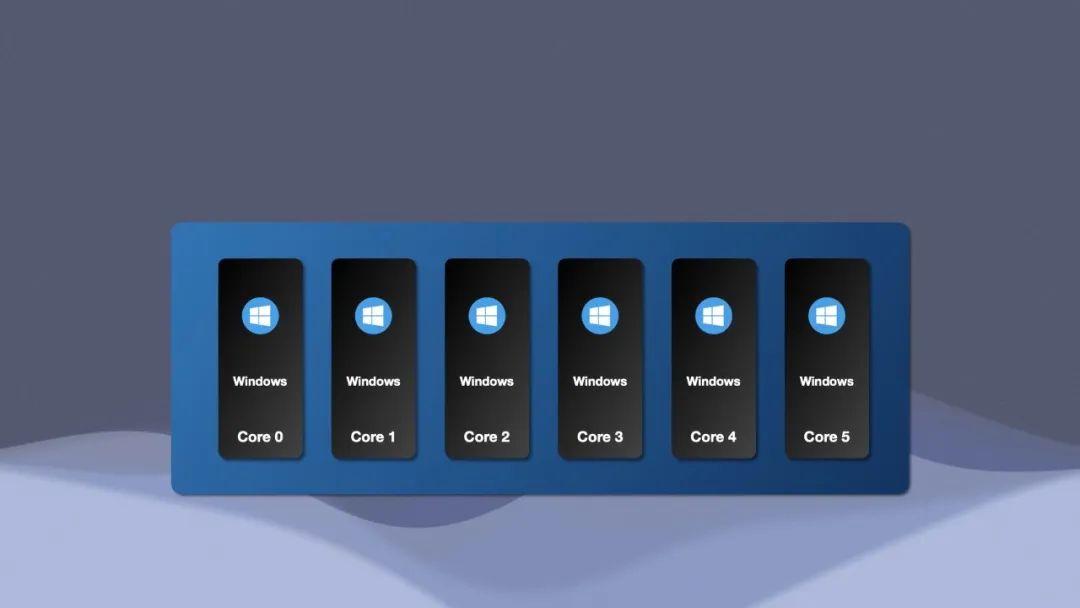

一个控制器可以最多执行互相独立的4个控制任务。剩余的CPU核心继续执行Windows任务。
N0.1
最高性能的运动控制和高性能的EtherCAT主站
基于ProCon硬件架构,设备中最高性能的运动控制任务可以通过FPGA管理的高速输入输出接口实现,最多8个脉冲轴的运动控制周期为50μs,最高频率6MHz。全闭环、PSO、二维位置比较、PWM能量跟随等通过硬件计算以达到最高精度/速度的功能,都可以通过这些脉冲轴实现。

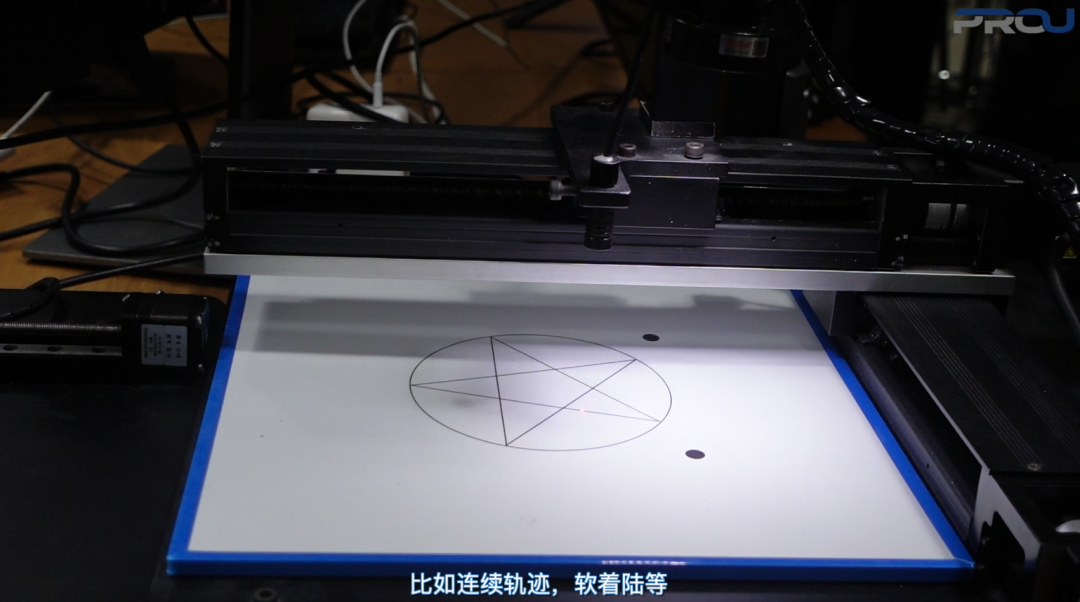
用户也可以通过一个独立的EtherCAT主站执行高性能的运动控制任务,比如连续轨迹,软着陆等。
实验
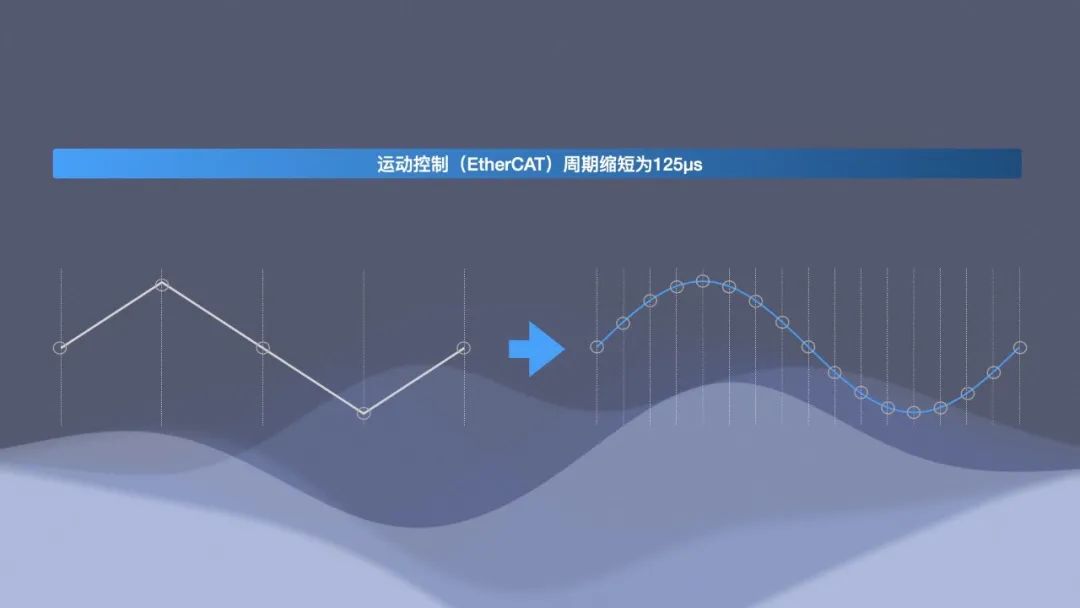
较短的运动控制周期可以提高运动的分辨率,也就是机器运动的敏捷性。比如缩短轴的启动和停止时间。这是对于高速运动的机器来说至关重要的性能。
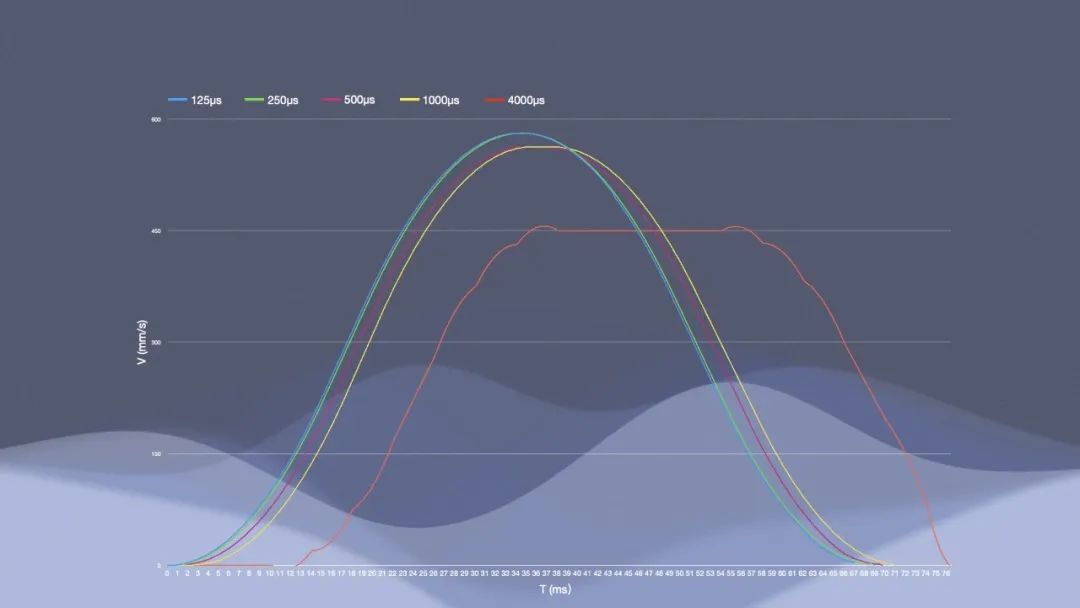
在这个实验中,我们将往复运动的驱动器设置为不同的EtherCAT周期。
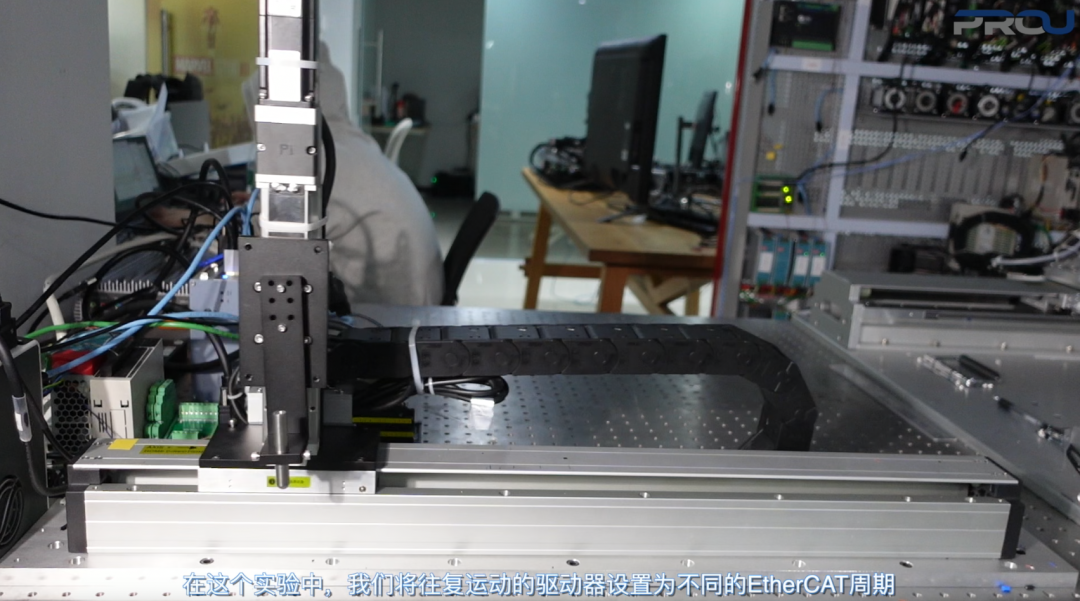
通过伺服反馈的速度曲线可以看到,从发出运动命令到伺服规划位置第1个微米,越长的EtherCAT周期则意味着更长的响应时间。
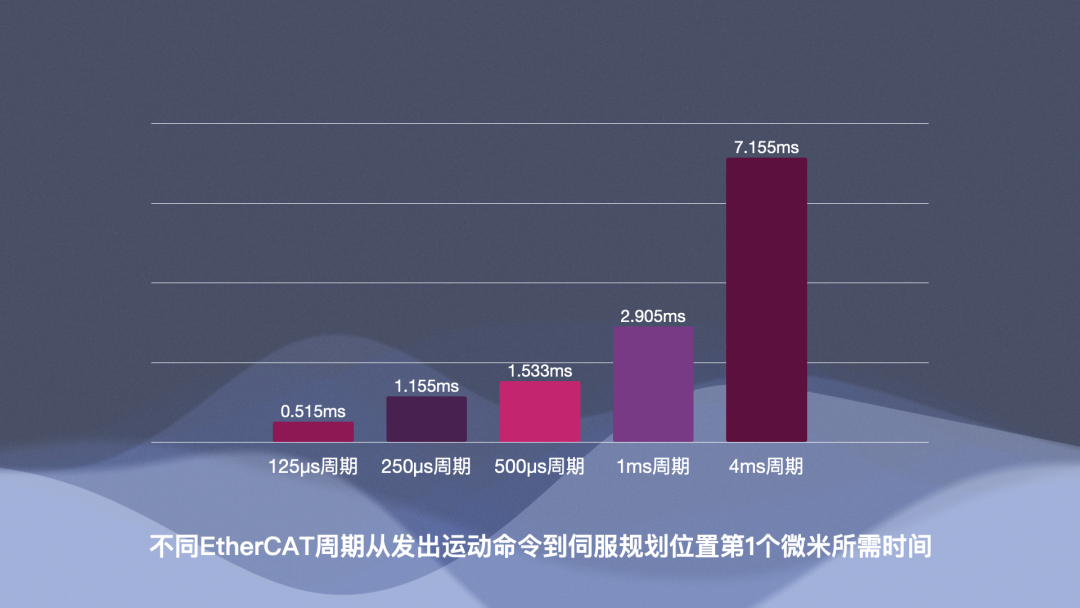
当机器的完整运动周期较短时,不同的EtherCAT周期会带来运动效果的较大改变。
N0.2
批量管理轴和IO的EtherCAT主站
用户可以通过一个独立的CPU核心和EtherCAT总线主站,管理设备中性能要求不高但是批量的轴和IO。

这个EtherCAT主站可以设定较长的比如1ms的EtherCAT周期,与系统中的其他EtherCAT主站相互独立。

N0.3
CNC通道
ProU计划在2023年发布的重磅功能— —YKCAT2 CNC通道 是一个独立的任务。

YKCAT2 CNC支持G代码编程,或者导入CAM软件生成的G代码。
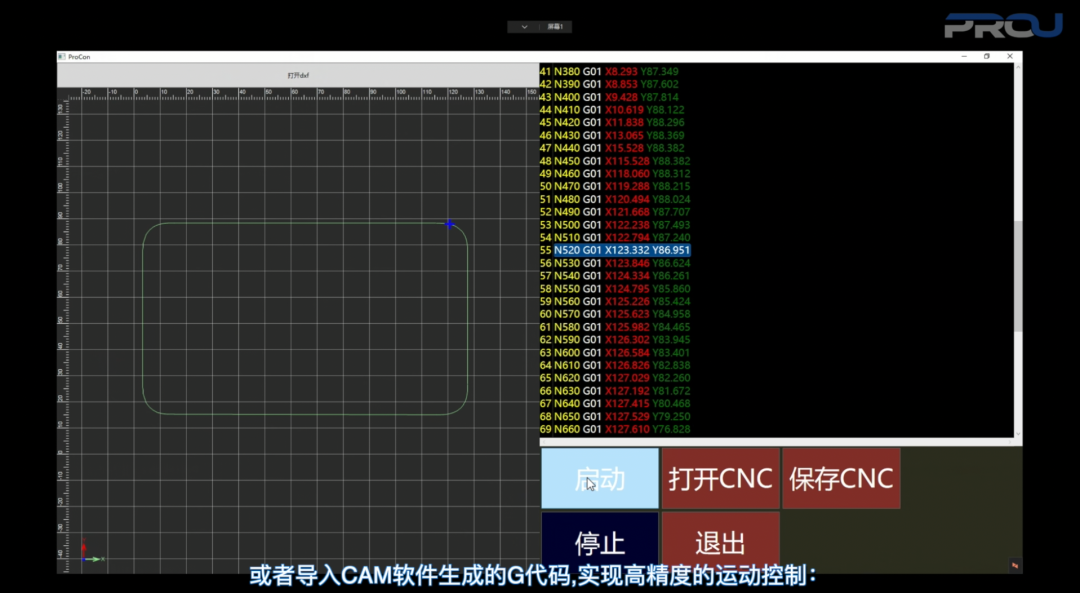
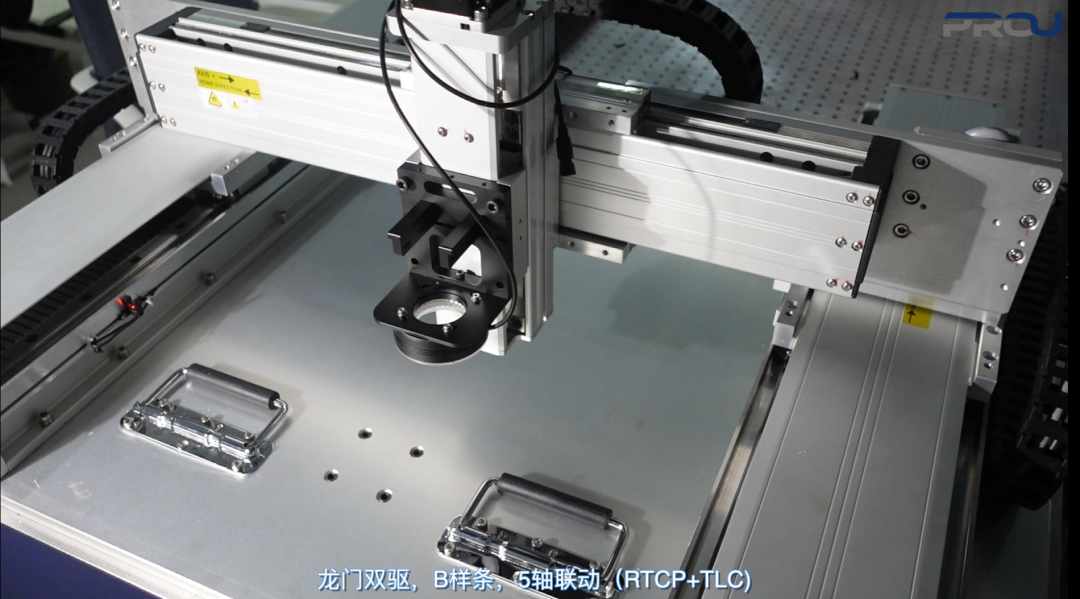
实现高精度的运动控制:龙门双驱、B样条、5轴联动(RTCP和TLC),满足行业顶级的轨迹控制需求。
N0.4
精确协调独立的控制任务
通过NoTime — — 基于实时系统的.NET技术,用户可以以250μs的精度,精确地协调4个独立的控制任务。
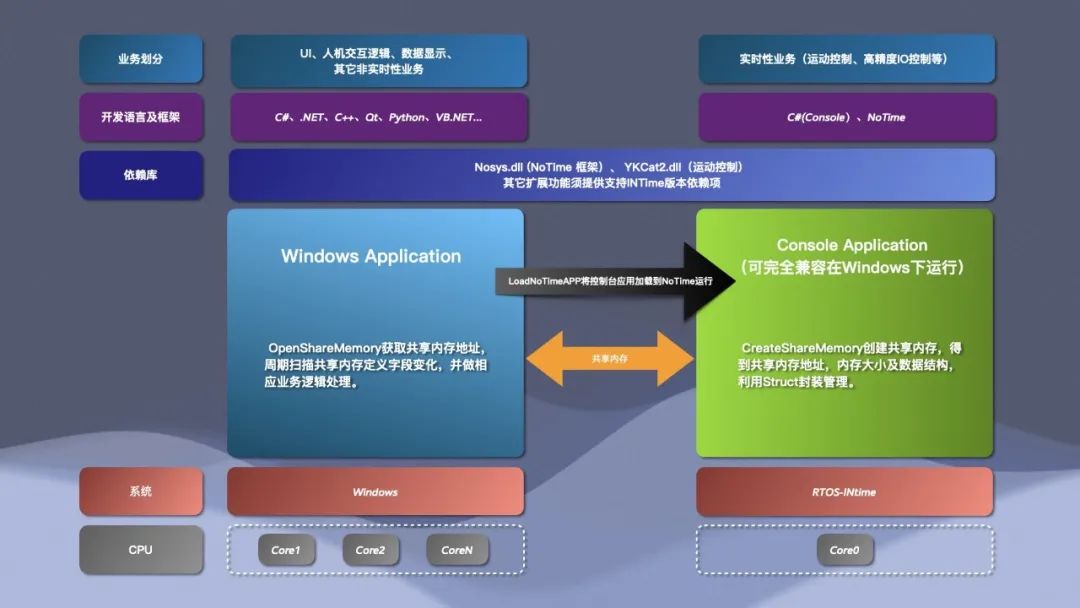
ProCon M多任务框架使用户可以灵活的分配轴和IO对于控制系统的算力负载,兼顾高性能和灵活的机器控制需求。
编辑:黄飞
-
第29章 STemWin多任务(uCOS-III)2016-10-15 4864
-
多任务编程多任务处理是指什么2021-12-22 1854
-
keil下的FreeRtos多任务程序学习2022-02-21 1418
-
多任务系统中的堆栈使用2023-01-05 2017
-
基于任务链的实时多任务软件可靠性建模2009-03-03 573
-
基于MDK RTX 的COrtex-M3 多任务应用设计2010-02-08 747
-
基于消息驱动的多任务操作机制2011-05-14 944
-
51单片机多任务机制的实现策略研究2011-09-19 767
-
基于 MDK RTX 的 COrtex—M3 多任务应用设计2016-08-24 803
-
基于Protothread的实时多任务系统设计2017-11-04 1223
-
一种实时嵌入式多任务微内核的分析与改进2021-07-30 924
-
stm32基于FreeRTOS的多任务程序2021-12-07 880
-
一个大规模多任务学习框架µ2Net2022-07-21 2279
-
PicoSem:Arduino框架下的Raspberry多任务2023-06-13 916
-
Arduino上的多任务处理2023-06-14 1355
全部0条评论

快来发表一下你的评论吧 !
