

 小型双轮差速底盘的制作
小型双轮差速底盘的制作
电子说
1.4w人已加入
描述
1.运动功能说明
小型双轮差速底盘可以通过两个驱动轮的 差速运动 来实现前进、后退、原地转向、大半径转向等基本行驶功能。


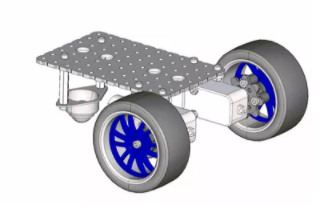
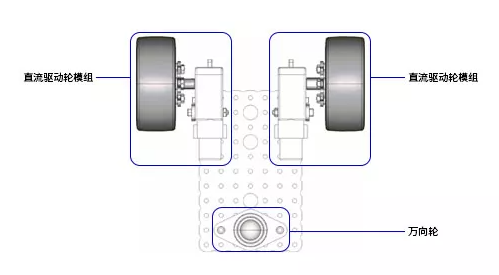
2.结构说明
该样机由两个 直流驱动轮模组 构成,驱动轮模组呈轴对称分布在车架上,再使用万向轮对车尾进行支撑,保持车身水平。
3.运动功能实现
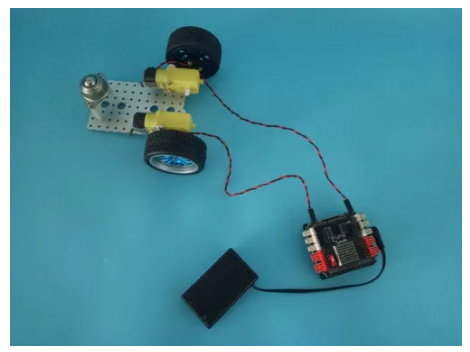
3.1 电子硬件
在这个示例中,我们采用了以下硬件,请大家参考:

将TT马达接在两个直流电机接口上,两个直流电机接口的针脚号分别为(D5,D6)以及(D9,D10),并将主控板和电池在车身固定好。
3.2 编写程序【完整代码请参考https://www.robotway.com/h-col-113.html】
前进功能的代码
|
/*------------------------------------------------------------------------------------ 版权说明:Copyright 2022 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved. Distributed under MIT license.See file LICENSE for detail or copy at https://opensource.org/licenses/MIT by 机器谱 2022-5-26 https://www.robotway.com/ -------------------------------- 实验功能: 实现小车前进. -------------------------------- 实验接线: 车头 .--------. | | | | 左轮 | | 右轮 D5, D6 *--------* D9, D10 ----------------------------------------------------------------------------------*/ void Forward(); // 前进 //程序初始化部分. void setup() { pinMode( 5 , OUTPUT); //将引脚5设置为输出模式 pinMode( 6 , OUTPUT); //将引脚6设置为输出模式 pinMode( 9 , OUTPUT); //将引脚9设置为输出模式 pinMode( 10 , OUTPUT); //将引脚10设置为输出模式 } //主程序部分 void loop() { Forward(); delay( 100 ); } // forward子程序封装. void Forward() { digitalWrite( 5 , LOW ); //将引脚5设置为高电平 digitalWrite( 6 , HIGH ); //将引脚6设置为低电平 digitalWrite( 9 , LOW ); //将引脚9设置为高电平 digitalWrite( 10 , HIGH); //将引脚10设置为低电平 } |
原地转向功能的代码
|
/*------------------------------------------------------------------------------------ 版权说明:Copyright 2022 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved. Distributed under MIT license.See file LICENSE for detail or copy at https://opensource.org/licenses/MIT by 机器谱 2022-5-26 https://www.robotway.com/ ---------------------------------------------------------- 实验功能: 实现小车原地转向. ---------------------------------------------------------- 实验接线: 车头 .--------. | | | | 左轮 | | 右轮 D5, D6 *--------* D9, D10 ----------------------------------------------------------------------------------*/ // 原地转向 void turn_in_Place(); //程序初始化部分. void setup() { pinMode( 5 , OUTPUT); //将引脚5设置为输出模式 pinMode( 6 , OUTPUT); //将引脚6设置为输出模式 pinMode( 9 , OUTPUT); //将引脚9设置为输出模式 pinMode( 10 , OUTPUT); //将引脚10设置为输出模式 } //主程序部分 void loop() { turn_in_Place(); delay( 100 ); } //原地转向子程序封装. void turn_in_Place() { digitalWrite( 5 , LOW ); //将引脚5设置为高电平 digitalWrite( 6 , HIGH ); //将引脚6设置为低电平 digitalWrite( 9 , HIGH ); //将引脚9设置为高电平 digitalWrite( 10 , LOW); //将引脚10设置为低电平 } |
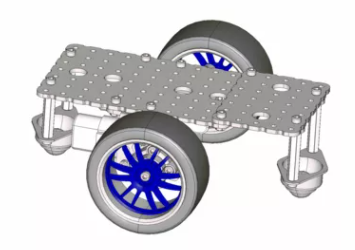
4.扩展样机
本样机也有一些扩展,如使用多个万向轮做支撑的版本,如下图所示。
5.资料内容
样机3D文件
例程源代码
资料下载详见 https://www.robotway.com/h-col-113.html
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
小型双轮差速底盘视觉循迹功能的实现2023-03-03 1274
-
小型三节履带底盘的制作2023-01-29 2142
-
小型平行履带底盘的制作分享2023-01-12 4118
-
小型双节履带底盘的制作2023-01-07 1675
-
差分底盘的设计资料分享2022-02-14 688
-
如何搭建实体机器人ros底盘2022-01-20 2420
-
制作一辆简易的树莓派小车2021-09-03 1759
-
小车底盘结构和搭建过程2021-08-23 1998
-
全方面解读斯柯达新速派底盘2018-07-25 22170
-
深度解析一汽-大众速腾GLI底盘2018-07-24 10383
-
一个老外的制作的双轮自平衡小车的所有资料2012-08-01 153724
全部0条评论

快来发表一下你的评论吧 !
