

 【Renesas RA6M4开发板之两路PWM驱动】
【Renesas RA6M4开发板之两路PWM驱动】
描述
1.0 PWM 简介
PWM(Pulse Width Modulation , 脉冲宽度调制) 是一种对模拟信号电平进行数字编码的方法,通过不同频率的脉冲使用方波的占空比用来对一个具体模拟信号的电平进行编码,使输出端得到一系列幅值相等的脉冲,用这些脉冲来代替所需要波形的设备。
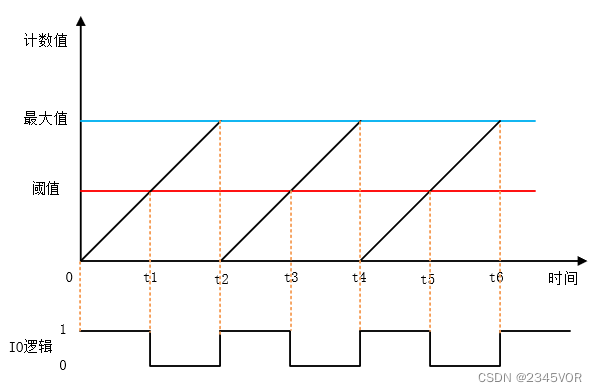
上图是一个简单的 PWM 原理示意图,假定定时器工作模式为向上计数,当计数值小于阈值时,则输出一种电平状态,比如高电平,当计数值大于阈值时则输出相反的电平状态,比如低电平。当计数值达到最大值是,计数器从0开始重新计数,又回到最初的电平状态。高电平持续时间(脉冲宽度)和周期时间的比值就是占空比,范围为0~100%。上图高电平的持续时间刚好是周期时间的一半,所以占空比为50%。
1.1 原理
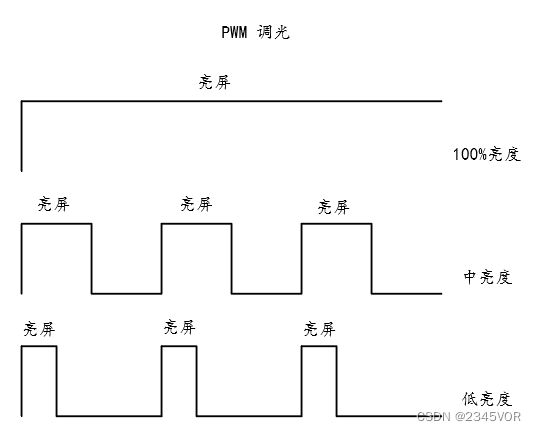
一个比较常用的pwm控制情景就是用来调节灯或者屏幕的亮度,根据占空比的不同,就可以完成亮度的调节。PWM调节亮度并不是持续发光的,而是在不停地点亮、熄灭屏幕。当亮、灭交替够快时,肉眼就会认为一直在亮。在亮、灭的过程中,灭的状态持续时间越长,屏幕给肉眼的观感就是亮度越低。亮的时间越长,灭的时间就相应减少,屏幕就会变亮。
1.2 访问 PWM 设备
应用程序通过 RT-Thread 提供的 PWM 设备管理接口来访问 PWM 设备硬件,相关接口如下所示:
| 函数 | 描述 |
|---|---|
| rt_device_find() | 根据 PWM 设备名称查找设备获取设备句柄 |
| rt_pwm_set() | 设置 PWM 周期和脉冲宽度 |
| rt_pwm_enable() | 使能 PWM 设备 |
| rt_pwm_disable() | 关闭 PWM 设备 |
2. RT-theard配置
2.1 硬件需求
实现功能:
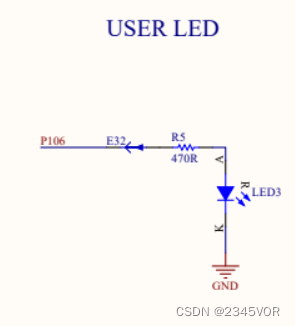
板载LED3(P106)和P107的LED两路PWM驱动。
1、RA6M4开发板
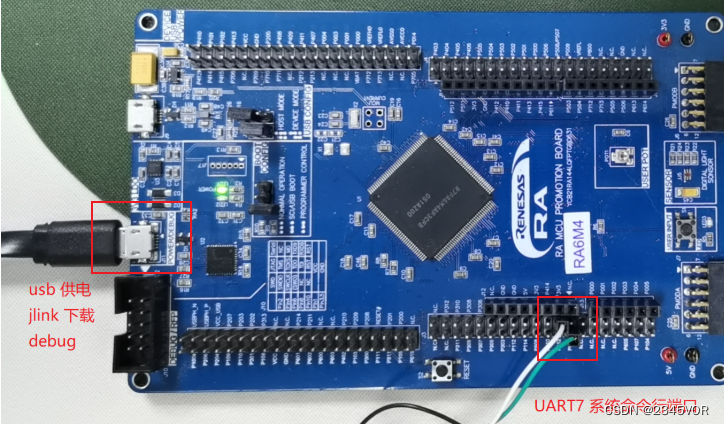
2、USB下载线,ch340串口和附带4根母母线,rx---p613;tx---p614
3、准备LED灯一个,正极接3.3V,负极接P107,板载LED3(P106)不变
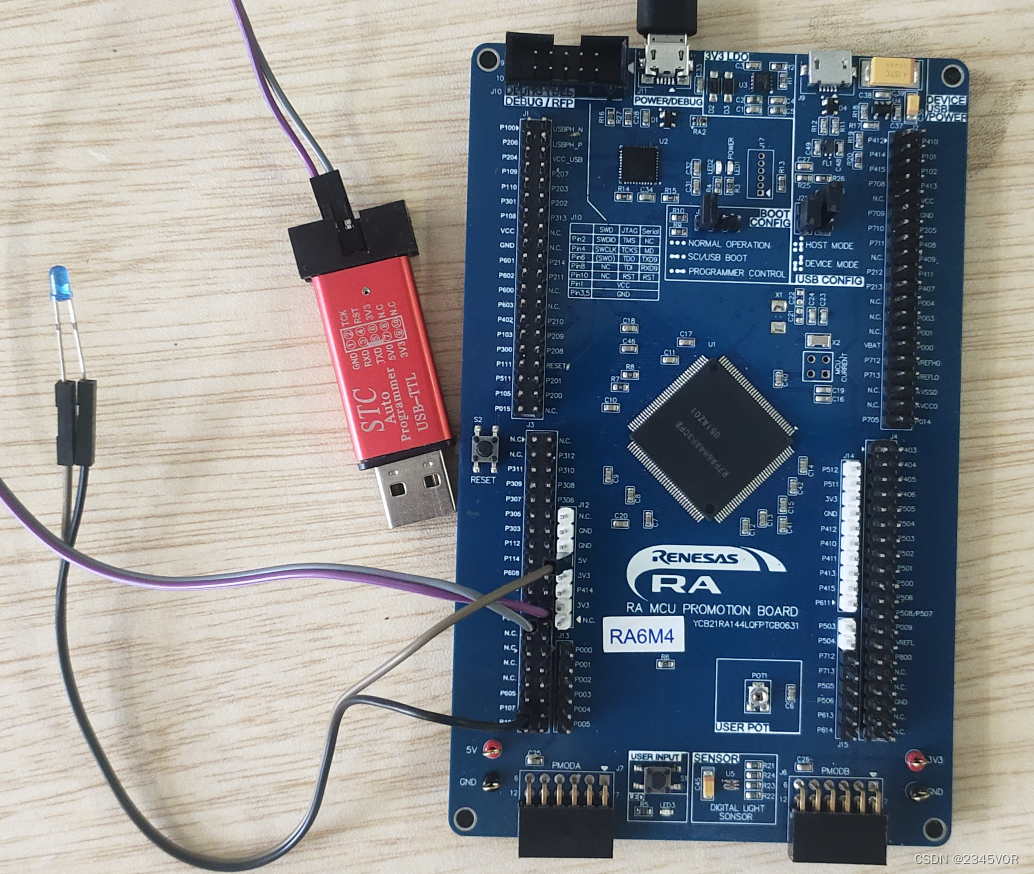
硬件到此配置完成
2.2 软件配置
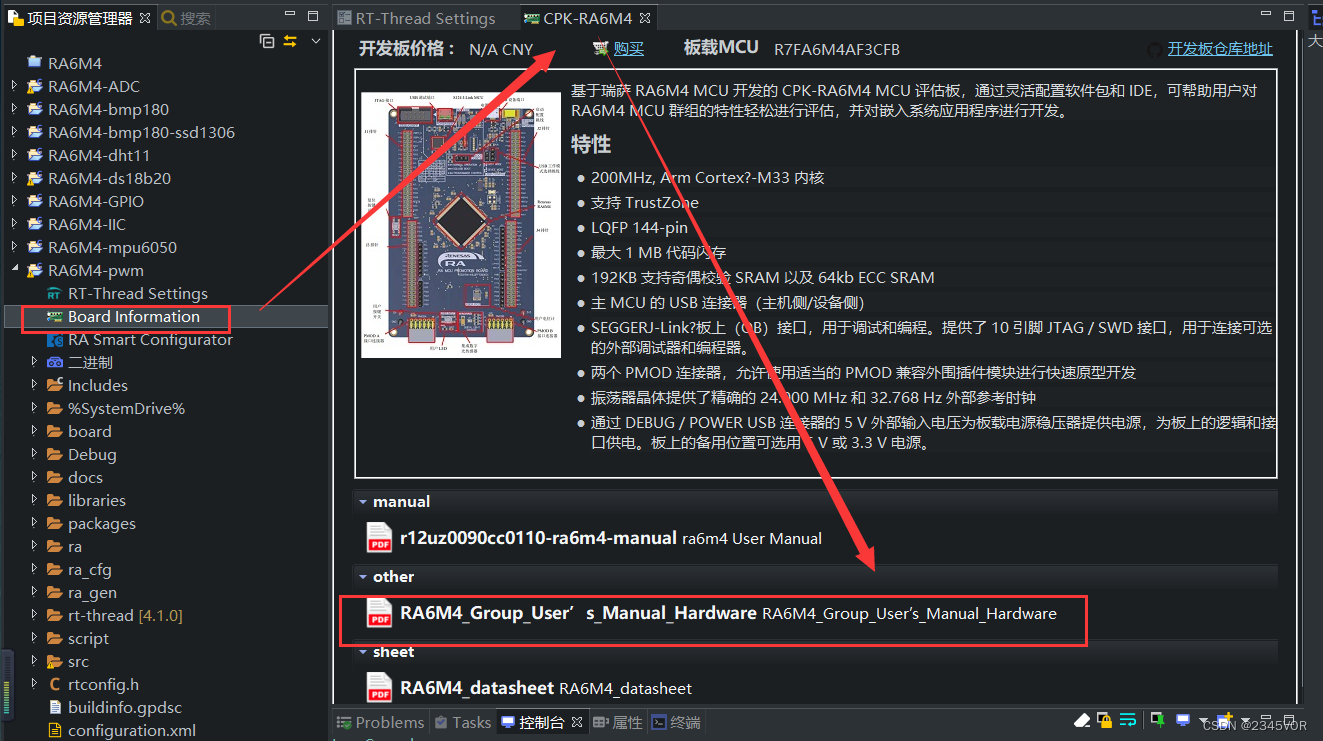
Renesas RA6M4开发板环境配置参照:【基于 RT-Thread Studio的CPK-RA6M4 开发板环境搭建】
1、新建项目RA6M4-pwm工程
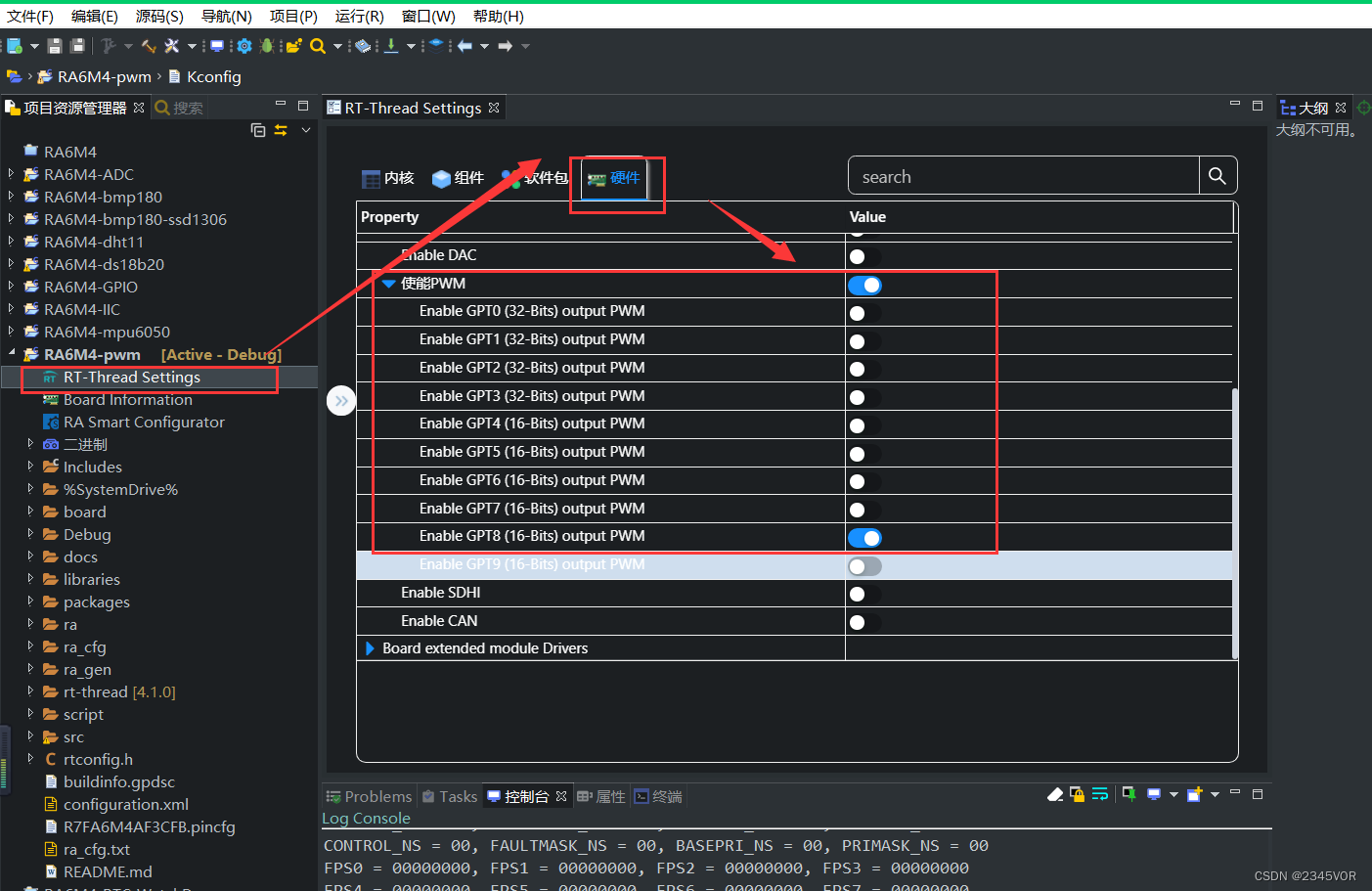
2、查阅RA6M4硬件资源,相关资料,在RT-theard Setting 硬件下开启PWM,使能pwm8
pdf文档第21章pwm
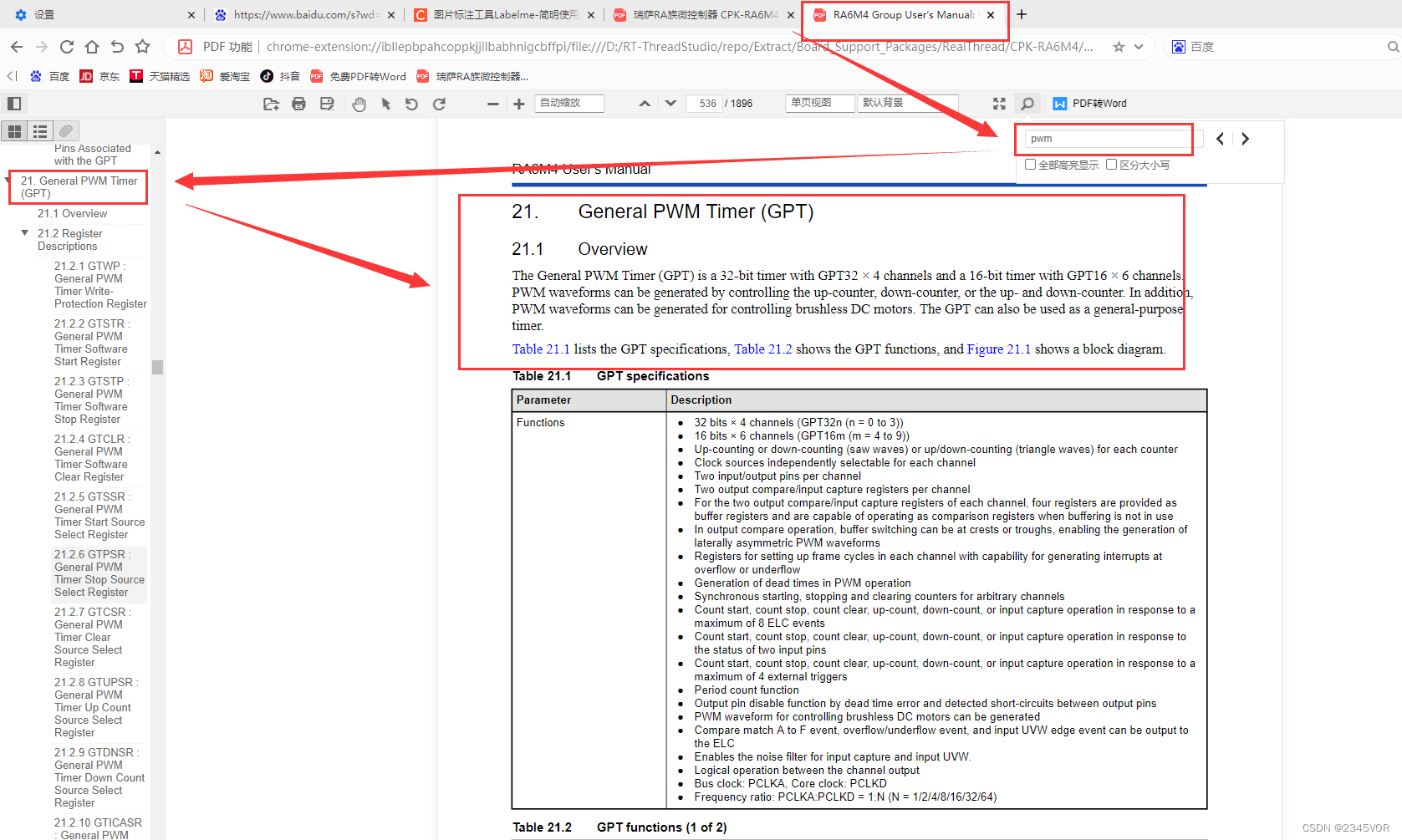
需要使能pwm8
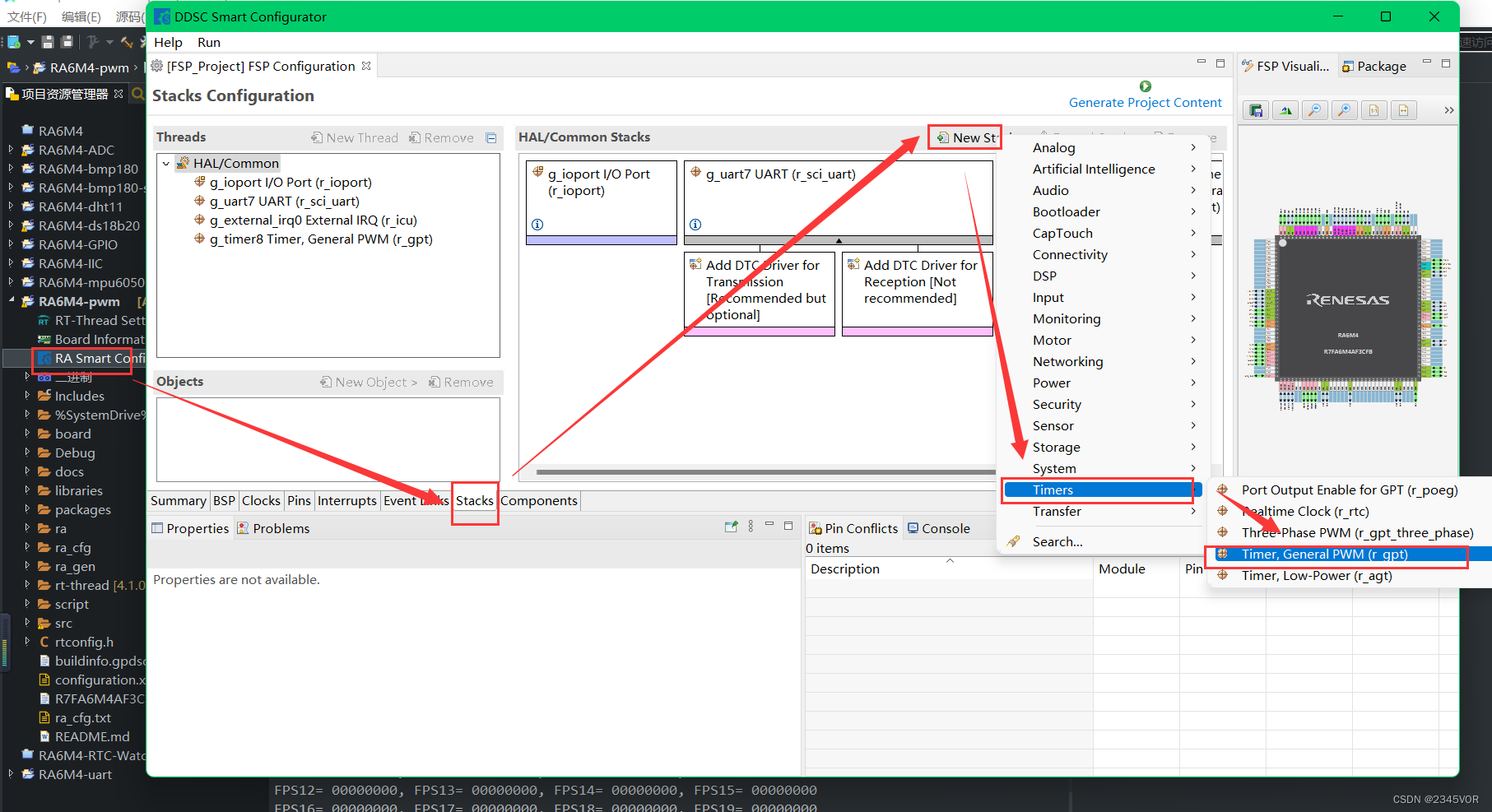
3、打开RA Smart Congigurator,在Stacks中New Stack添加r_gpt
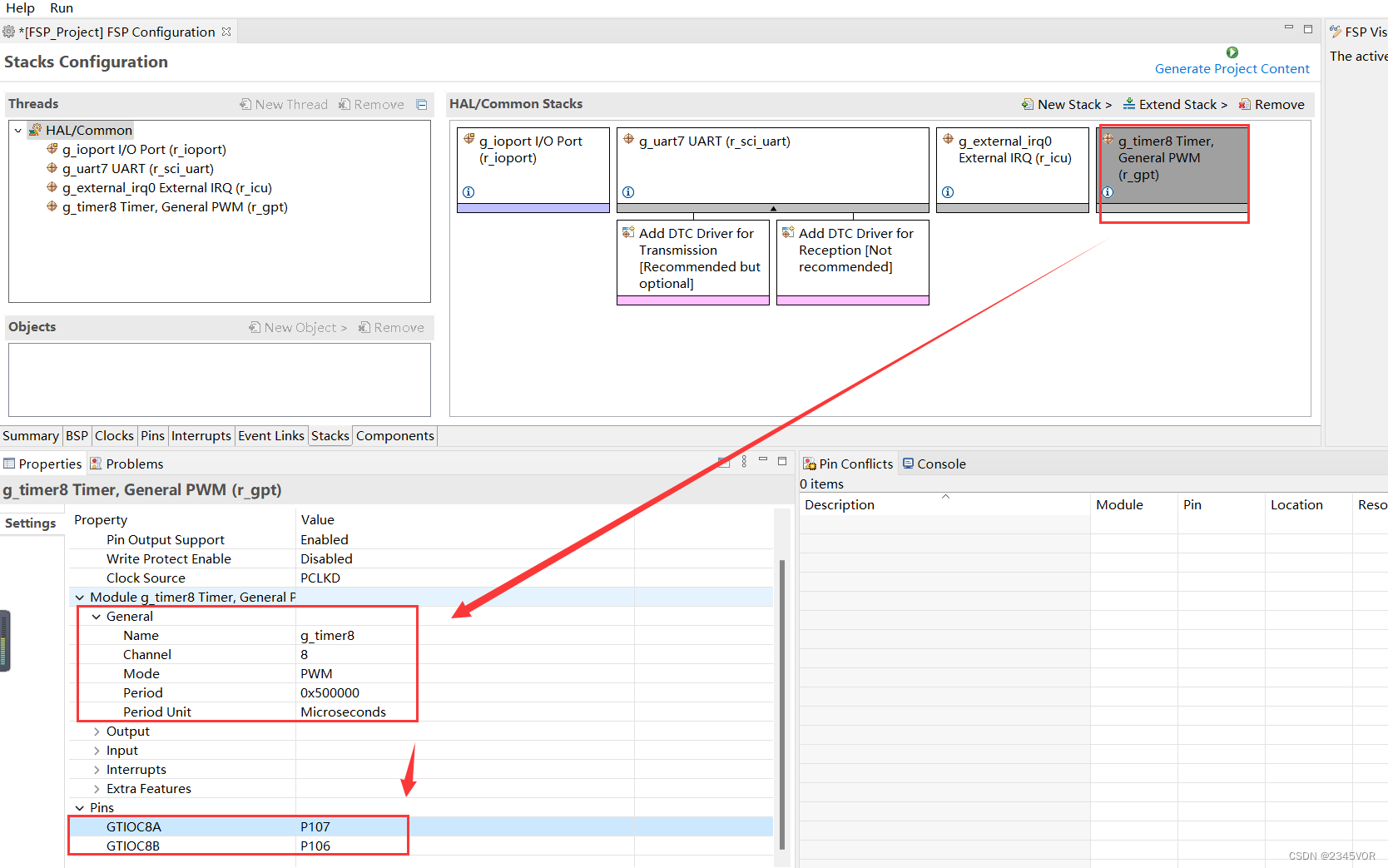
4、在Property的Module的General中选Channel8,Pins选择P107和P106
5、然后Generate Project Content 同步更新刚刚配置的文件
图形化配置已经完成,接下来配置相关代码
3. 代码分析
1、修改hal_entry.c函数,屏蔽LED3普通GPIO输出
/*
* Copyright (c) 2006-2021, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2021-10-10 Sherman first version
* 2021-11-03 Sherman Add icu_sample
*/
#include 在src文件下新建pwmled.c和pwmled.h文件,其他不变。
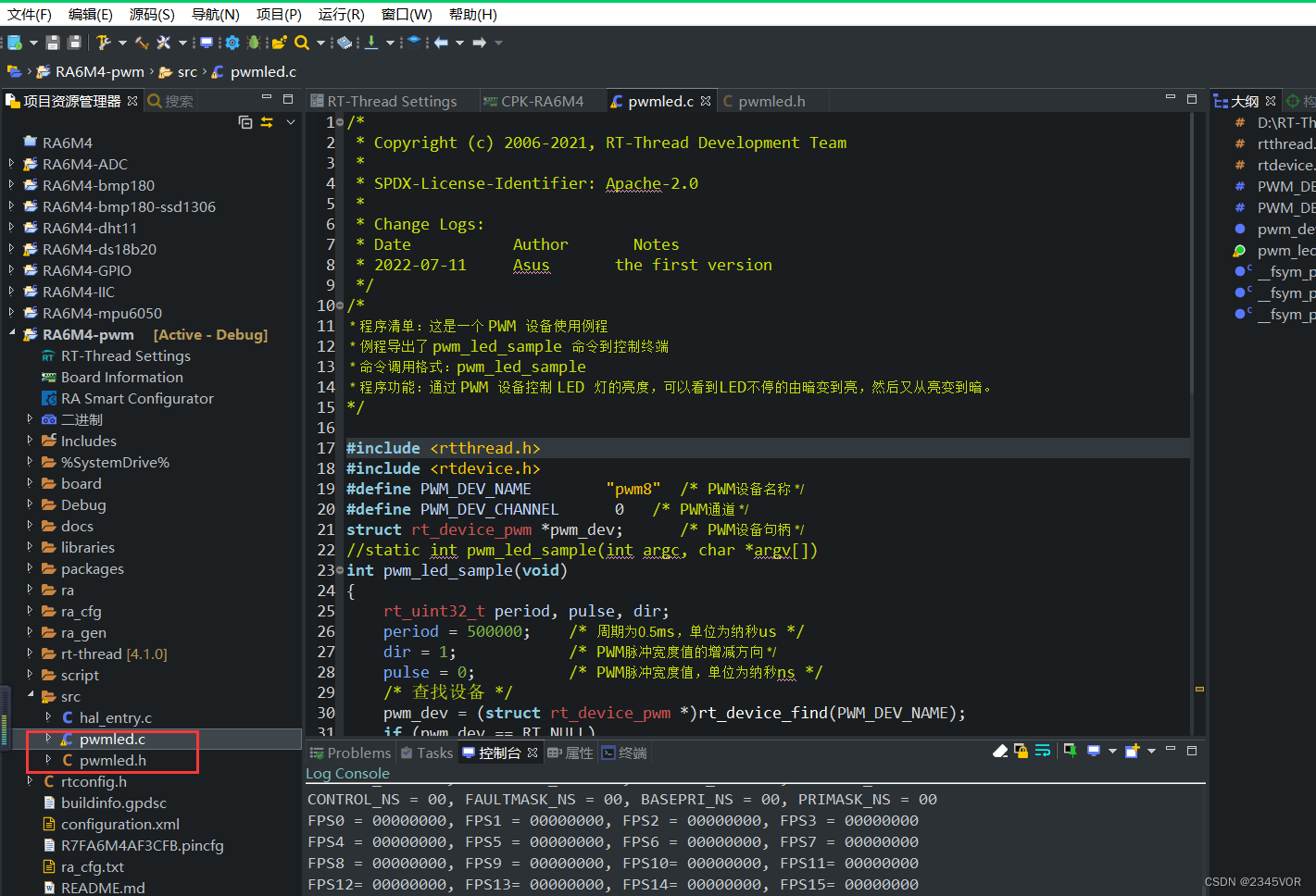
pwmled.c
/*
* Copyright (c) 2006-2021, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2022-07-11 Asus the first version
*/
/*
* 程序清单:这是一个 PWM 设备使用例程
* 例程导出了 pwm_led_sample 命令到控制终端
* 命令调用格式:pwm_led_sample
* 程序功能:通过 PWM 设备控制 LED 灯的亮度,可以看到LED不停的由暗变到亮,然后又从亮变到暗。
*/
#include pwmled.h
/*
* Copyright (c) 2006-2021, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2022-07-11 Asus the first version
*/
#ifndef PWMLED_H_
#define PWMLED_H_
int pwm_led_sample(void);
#endif /* PWMLED_H_ */
保存完是灰色,没有保存是蓝色。
pwm_led_sample导 出 到 msh 命 令 列 表 中,实现pwm8的两路输出
4. 下载验证
1、编译重构
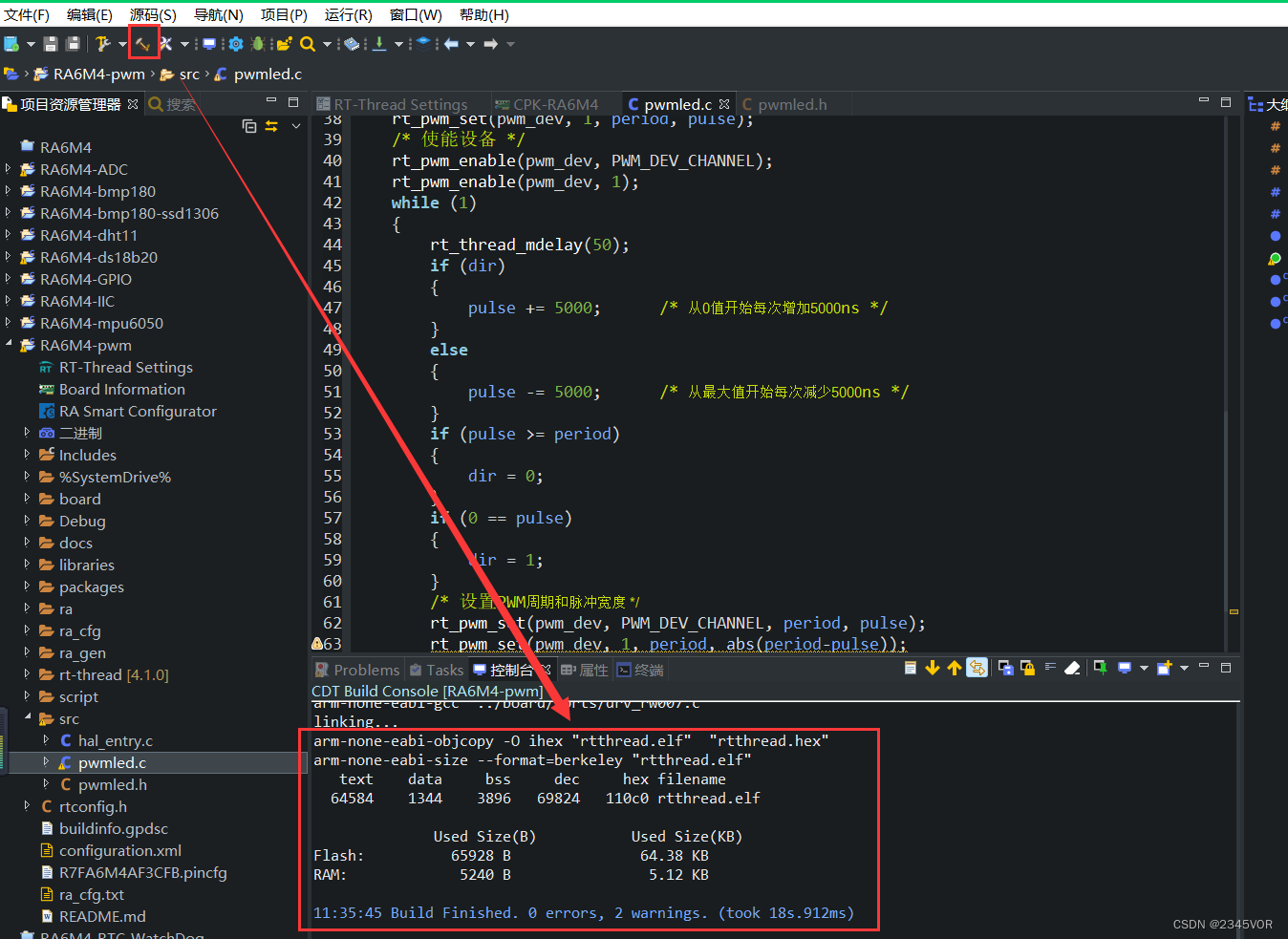
编译成功
2、下载程序
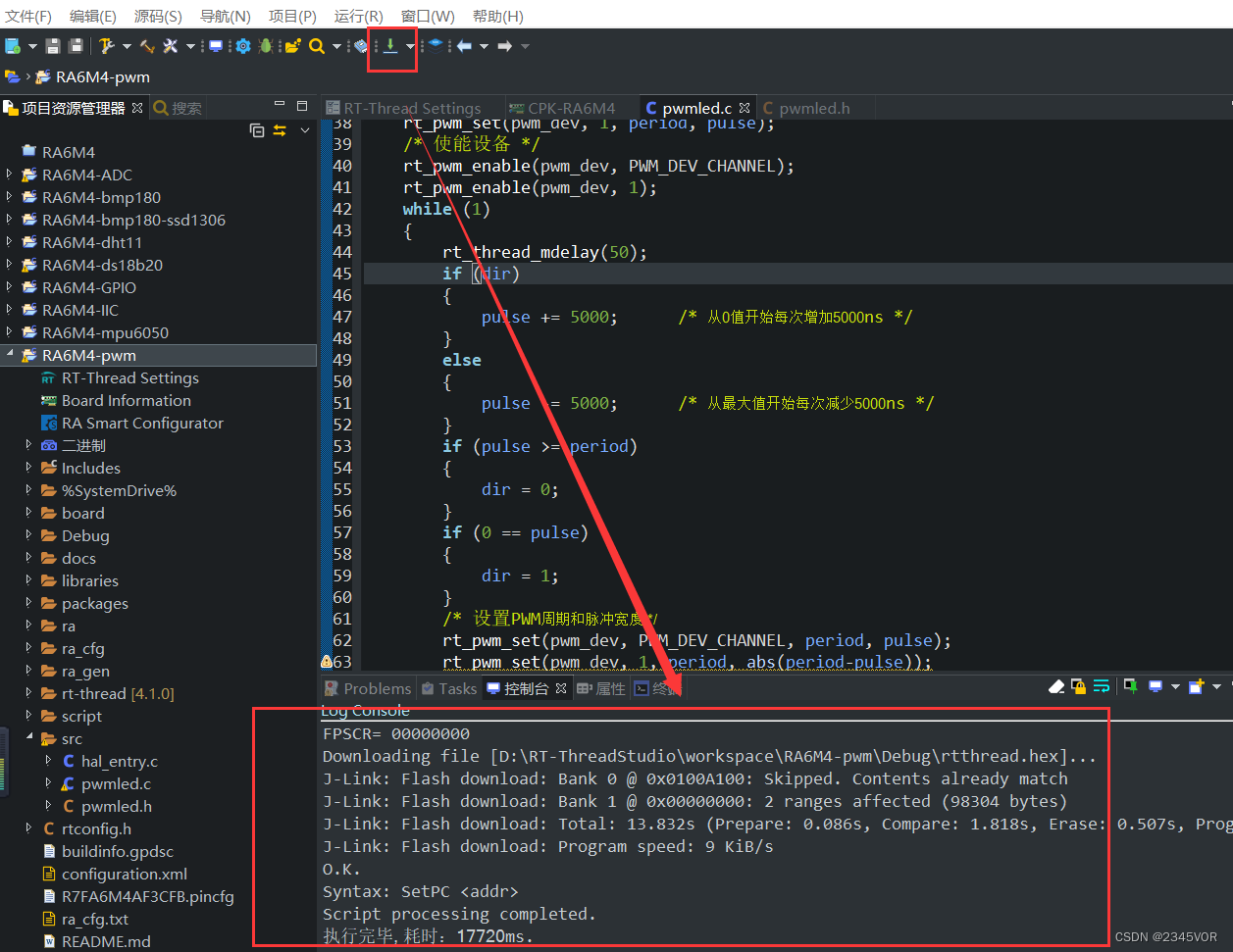
下载成功
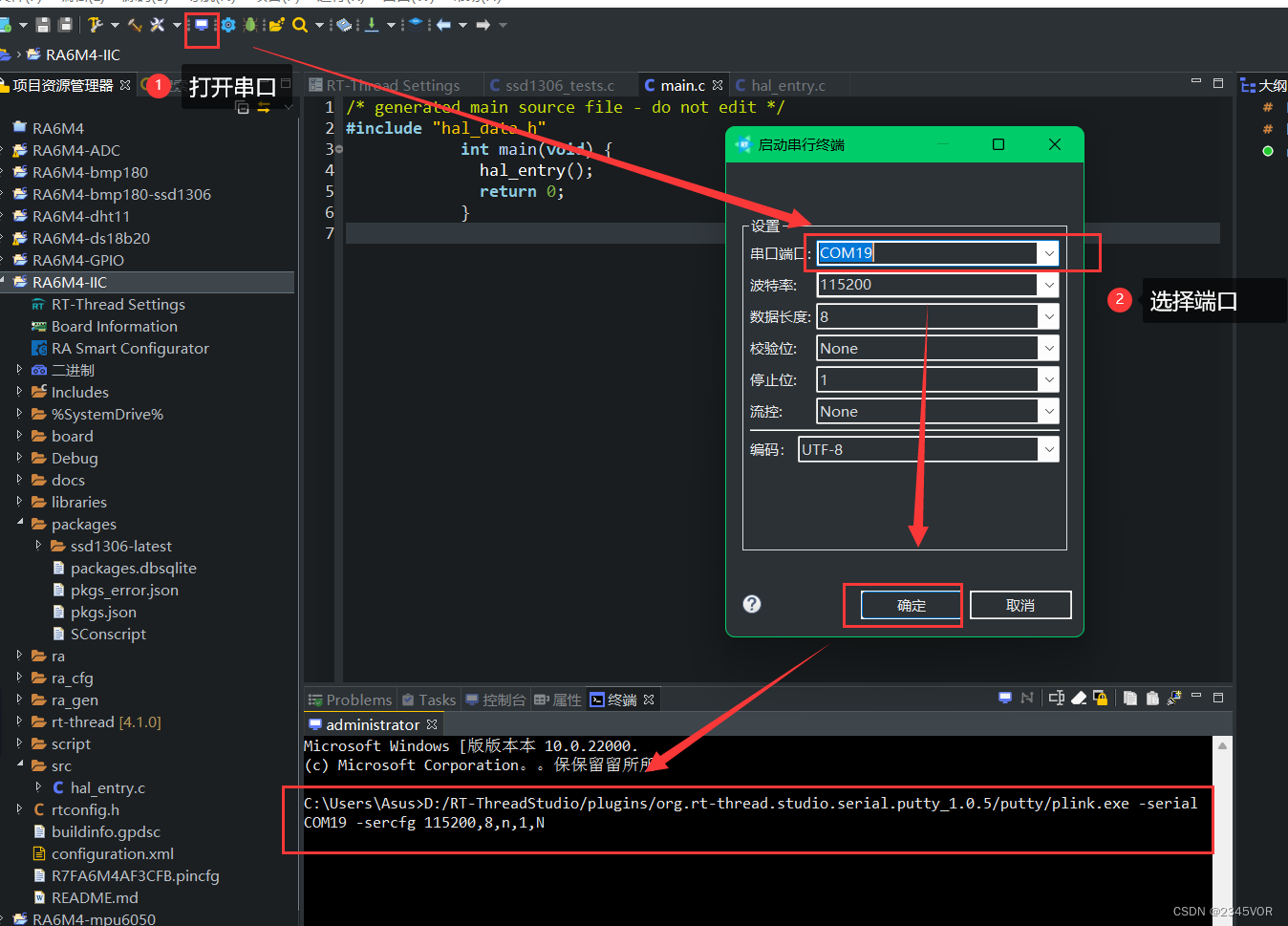
3、CMD串口调试
然后板载复位,输入:pwm_led_sample
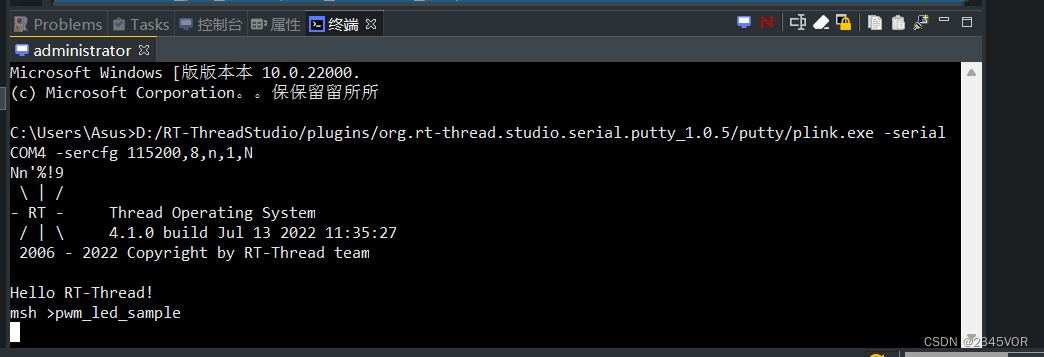
效果如下

这样我们就可以天马行空啦!
参考文献;
【基于 RT-Thread Studio的CPK-RA6M4 开发板环境搭建】
【开发板评测】Renesas RA6M4开发板之PWM呼吸灯
pwm端口是成对存在的,一共有10对
-
【开发板评测】Renesas RA6M4开发板之ESP8266_AT2022-12-30 3568
-
【Renesas RA6M4开发板之I2C(模拟)驱动ssd1306 OLED屏幕】2023-01-11 6549
-
【Renesas RA6M4开发板之I2C读取BMP180气压温度】2023-01-16 6122
-
【RA-Eco-RA6M4开发板评测】开发环境搭建2025-11-09 1733
-
如何对Renesas RA6M4开发板的FLASH模块进行测评呢2022-04-01 5757
-
Renesas CPK-RA6M4开发板之SDIO模块评测2022-07-21 2896
-
Renesas RA6M4开发板之USB-H评测活动2022-11-22 917
-
RA6M4驱动5寸屏显示PC运行状态并进行监控源码2022-09-26 672
-
【开发板评测】Renesas RA6M4开发板之FLASH2022-12-16 2858
-
【开发板评测】Renesas RA6M4开发板之CAN2022-12-20 3760
-
【开发板评测】Renesas RA6M4开发板之SDIO(SDHI)2022-12-27 4926
-
基于RT-Thread Studio的CPK-RA6M4开发板环境搭建2023-01-10 3193
-
【Renesas RA6M4开发板之I2C读取mpu6050】2023-01-17 18292
-
【Renesas RA6M4开发板之DHT11温湿度读取】2023-01-18 3672
-
Renesas RA6M4微控制器:性能卓越的硬件之选2026-04-01 295
全部0条评论

快来发表一下你的评论吧 !
