

关于FPGA 脉动阵列的设计方案解析
可编程逻辑
描述
一:定义
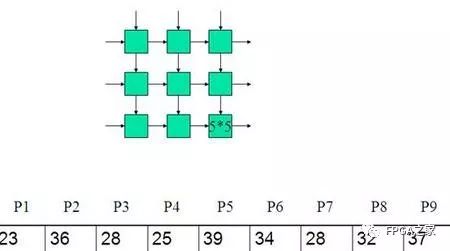
脉动阵列:数据流同步流过相邻的二维阵列单元的处理器结构,一般不同方向流过不同数据。如下图:
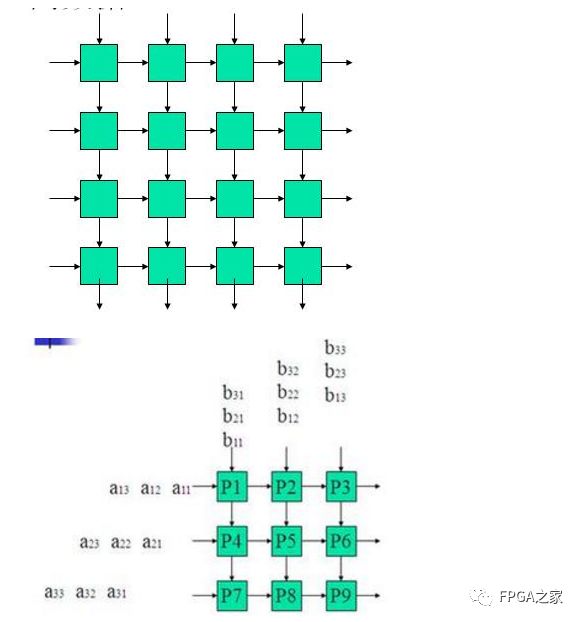
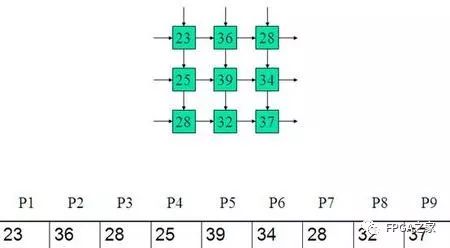
二维不同数据在同一时钟下依次输入每个处理单元,而后完成乘法并存在其寄存器中。
二:举例
三:设计
结构:

单个PE的代码
module pe(clk, reset, coeff, in_x, in_y, out_x, out_y);
parameter size = 8;
input clk, reset;
input [size-1:0] in_x, coeff;
input [size+size-1:0] in_y;
output [size-1:0] out_x;
output [size+size-1:0] out_y;
reg [size+size-1:0] out_y;
reg [size-1:0] out_x;
always@(posedge clk)
begin
if(reset) begin
out_x <= 0;
out_y <= 0;
end
else begin
out_y <= in_y + (in_x * coeff);
out_x <= in_x;
end
end
endmodule

四个PE,其余类推
//***** main ****************************
module systolic(clk, reset, input_x, output_y);
parameter size = 8;
input clk, reset;
input [size-1:0] input_x;
output [size+size-1:0] output_y;
wire [size-1:0] pe0_x, pe1_x, pe2_x, pe3_x;
wire [size+size-1:0] pe1_y, pe2_y, pe3_y;
wire [size-1:0] h0 = 8'h01;
wire [size-1:0] h1 = 8'h01;
wire [size-1:0] h2 = 8'h01;
wire [size-1:0] h3 = 8'h01;
wire [size+size-1:0] pe4_y = 16'h0000;
pe pe_0(clk, reset, h0, input_x, pe1_y, pe0_x, output_y);
pe pe_1(clk, reset, h1, pe0_x, pe2_y, pe1_x, pe1_y);
pe pe_2(clk, reset, h2, pe1_x, pe3_y, pe2_x, pe2_y);
pe pe_3(clk, reset, h3, pe2_x, pe4_y, pe3_x, pe3_y);
endmodule
=========================================================================================================
脉动阵列(Systolic Array)计算矩阵乘法(Array Multiplication)
下一个目标是实现流水线输出,提升硬件资源的利用率。
脉动阵列(Systolic Array):数据流同步流过相邻的二维阵列单元的处理器结构,一般不同方向流过不同数据。
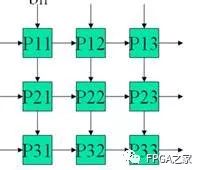
结构:
矩阵计算:

C语言描述每个输出矩阵中的值:
For I = 1 to N
For J = 1 to N
For K = 1 to N
C[I,J] = C[I,J] + A[J,K] * B[K,J];
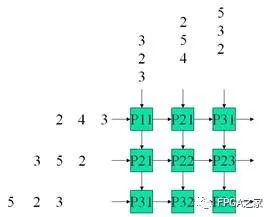
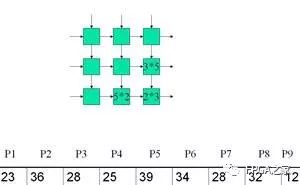
运用N x N processing units,输入数据呈批次输入:
二维不同数据在同一时钟下依次输入每个处理单元,而后完成乘法并存在其寄存器中。
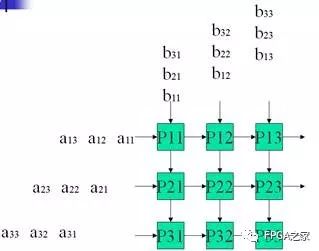
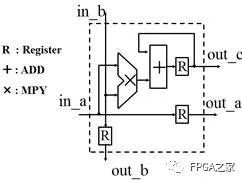
其中每个PE(处理单元)结构如下:
是一个乘加单元 c=c+(a*b)
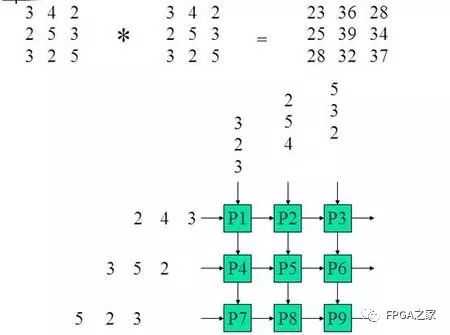
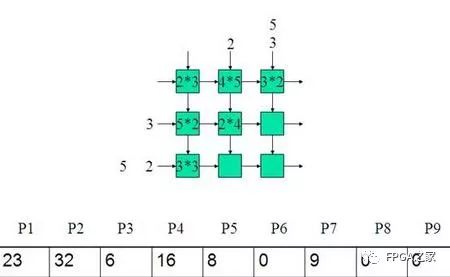
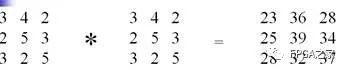
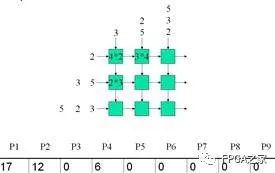
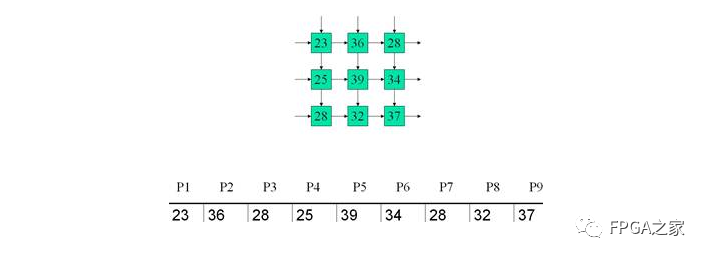
例子:计算两个3×3矩阵的乘积
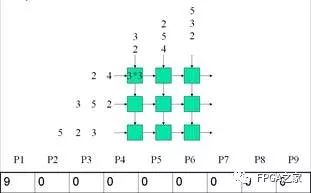
结构:
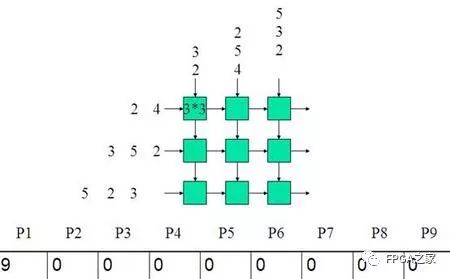
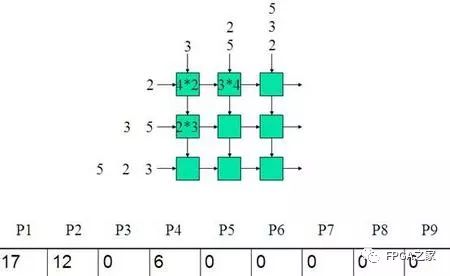
在CLK驱动下的每一个步骤如下:
Clk1:
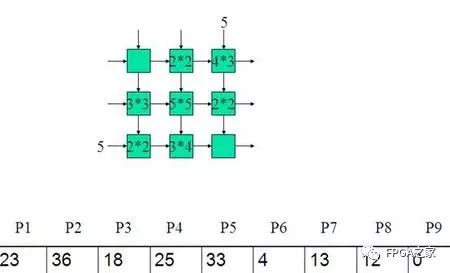
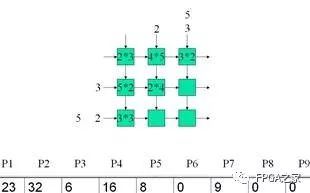
Clk2:
Clk3:
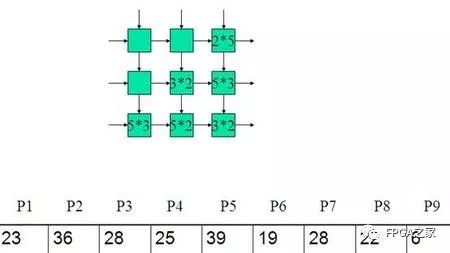
Clk4:
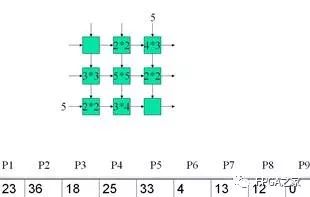
Clk5:
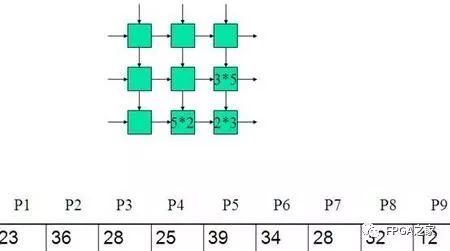
Clk6:
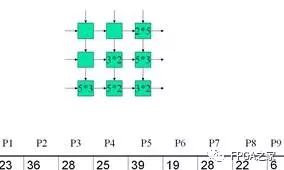
Clk7:

Clk8:输出
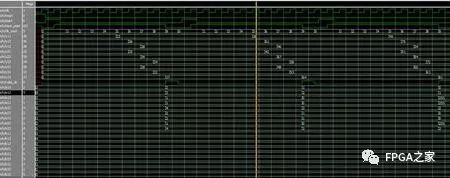
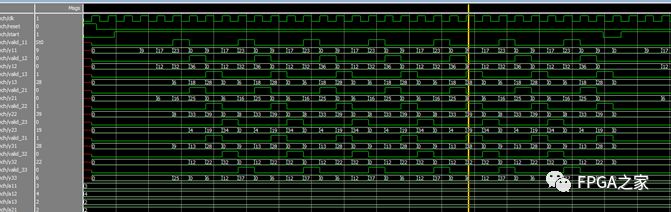
功能仿真图:
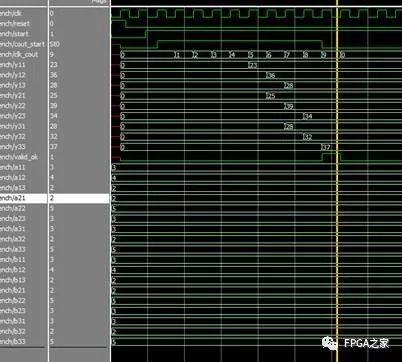
在start 上升沿到来后的第一个CLK上升沿开始计数
Count_start高电平期间
Cout=1时,准备a11和b11;
Cout=2时,将数据打入寄存器,并计数出a11*b11;
Cout=3时,计数a11*b11+a12*b21
Cout=4时,计数a11*b11+a12*b21+a13*b31
Cout=5时,用寄存器打一拍输出Y11。
其他类似。
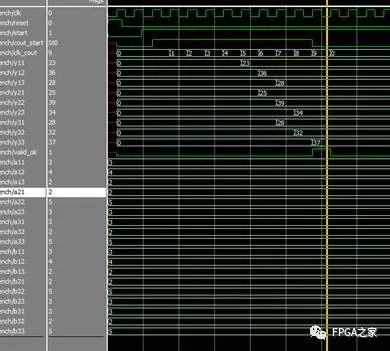
时序仿真图:
连续运算,中间忘了将乘加单元寄存器清零的情况,功能仿真:
每次计算出结果后清零寄存器,修改后的功能仿真图:
数据在送入运算单元之前,采用寄存器打一拍,功能仿真图:

状态机便于实现控制。
状态机控制:功能仿真
时序仿真图:
二维流水线结构矩阵乘法(Array Multiplication)
上一篇文中建立了矩阵乘法运算的数据路径,从仿真结构中可以看出整个计算方案的可行性,但是存在一个问题,就是硬件运算单元的资源利用率不高。这是什么意思呢?就是说,在每次计算两个3*3矩阵的乘法之前,需要将整个运算单元中的每个寄存器都清零,但是9个输出结果不是在同一个时刻输出,有先有后。当最先出结果的P11计算出第一个结果之后,它就不再输出新值了。其实这时硬件电路是存在的,而且是在不断计算出新值,只是这些值不是我们需要的有效值。那么如果将这些硬件资源完全被利用起来,让它们在最短的时间间隔里都有有效正确数据输出呢。
其实要说的就是流水线设计思想,我们只需要当P11单元计算出新的值,下个CLK将其计算结果输出(只要有另一个机制接收这些值),然后将其清零(如果不清零,那个会累加了上次的计算结果),再然后就可以将下个要计算的两个3*3矩阵对应位置上面的新值输入给P11单元,让其计算两个数的乘积。
其他单元类似,思想就是在输出结果后立即做清零和赋新值,不必等整个计算单元都出结果之后才开始进行下个矩阵乘法的计算。
那么从大局来看,就出现个这样的情况:在上个矩阵计算还没有完全计算出9个值的时候(右下角部分还在计算),左上角的单元就已经开始下个矩阵乘法的计算。关于输出就是,每个CLK都有有效的数据输出,产生了流水输出。而这些输出是从这整个二维矩阵计算单元的某些地方同时输出的,就像水流即向下流也向右流,只是在这里水流对应了数据输出。
回顾一下这样做的目的是什么:为了增加整个运算单元的利用率。做了改进,我们可以看出,每个CLK到来时,每个计算单元中的乘法和加法器的运算都是有效的计算。我们一定要记住FPGA做运算和CPU做计算的不同点。FPGA做运算,那些设计好的运算单元,不管你对这些运算单元操作或者不操作,它们都已经以硬件电路的形式存在了,也就是说,每个CLK到来时,它们都进行了一次计算。那么如何有效的利用这些运算单元,就是不要让它们做无效的计算,让它们每一次的计算都对我们来说是有效的,是一个对整个单元输出有影响的计算。而想实现这样的功能流水线设计方法是必须要采用的。只是有时候单向流水(一维)更容易被我们所理解。其实这二维运算单元也是如此,也可以产生流水。
相对于不采用流水线操作,数据路径不必做太多修改,主要是控制单元更为复杂,要考虑何时对某个单元清零,何时再对其赋值,何时把数据读走等。这些需要比较精准的调度。有人会想,那么这样是不是需要更多状态机状态?答案是肯定的。那么是不是需要更多的硬件资源的开销呢?答案也是肯定的。那么这种流水线的优势在哪呢?其实是速度上面的优势,有时候在不能提高整个系统的工作频率的情况下,再消耗一点资源来提高其它部分(运算单元)的利用率也是一个很好的提高运算速度的办法。(注:这并不等同于面积与速度的法则)其实这也是一个比较好的,硬件算法优化方案。我们可以将其归纳为以优化算法路径的算法优化方法。
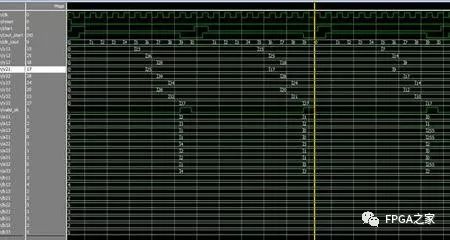
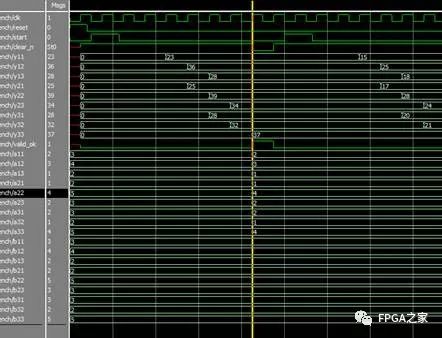
下面是仿真结果:
矩阵还是之前的矩阵。可以看出每个CLK都有2-3个有效输出。
增加了Valid信号,当其为高电平时,说明对应运算单元输出是有效值。其实在算法成熟之后,这些Valid信号是可以撤销的,因为我们完全知道了,输出的规律,只需要在特定的时间读走数据即可。而且我们可以将这些数据合并到几根连续有效的总线上面。让每个总线上面每个CLK都是有效值。(笔者将按照此方法,继续优化输出总线)
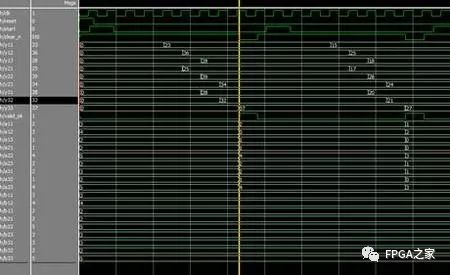
下面是对输入最大值时的输出仿真,主要是看数据会不会益处:
测试8bits输入最大值255对应的输出值:
时序仿真:
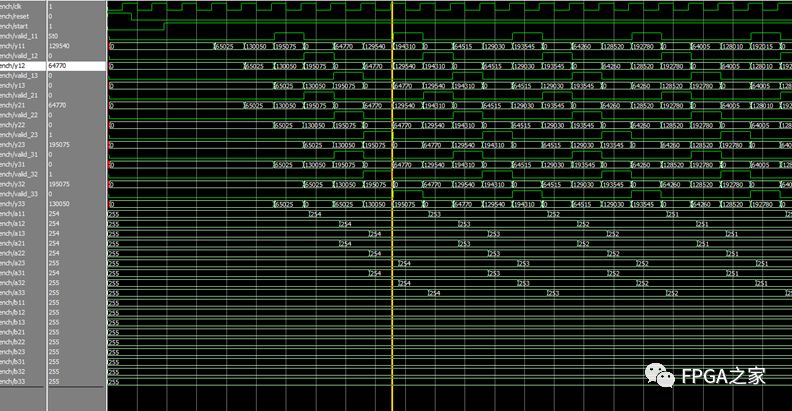
255*255+255*255+255*255=195075
255*254+255*254+255*254=194310
编辑:黄飞
-
赛灵思FPGA电源解决方案全解析2026-04-02 395
-
基于CPLD/FPGA的多串口扩展设计方案2023-10-27 667
-
基于PE的脉动阵列设计2023-10-09 2429
-
快速实现基于FPGA的脉动FIR滤波器,VHDL,脉动阵列,PE处理单元,FIR滤波器2022-12-01 2492
-
基于FPGA的伪随机数发生器设计方案2021-06-28 5048
-
基于CPLD/FPGA的半整数分频器设计方案2021-06-17 1196
-
基于FPGA的二进制相移键控设计方案2021-05-28 1317
-
如何设计一个脉动阵列结构的FIR滤波器?2021-04-20 2099
-
基于FPGA的调焦电路设计方案资料下载2018-05-07 1460
-
基于FPGA的OLED真彩色显示设计方案2017-01-18 1038
-
基于FPGA的变频器设计方案,利用simulink仿真2014-09-10 3170
-
FPGA典型设计方案精华汇总2012-08-16 12431
-
FPGA设计大赛设计方案提交规则和截止时间须知2012-05-04 21030
-
多种EDA工具的FPGA设计方案2010-05-25 961
全部0条评论

快来发表一下你的评论吧 !
