

一种自矢量电磁软体机器人的新概念
描述
受生物系统启发的软机器人具有卓越的灵活性、适应性和安全性,在搜索救援、野外探索、人机交互和生物医学应用方面显示出巨大潜力。软材料和结构在理论上能赋予传统刚性机器人难以企及的无限自由度和灵活性,然而实际实施中受限于驱动机理和结构设计,更丰富的变形和更灵巧的运动不可避免地需求更多数量的软驱动器和庞大复杂的控制系统。尽管科学家们已经开发出了流体驱动、电驱动、磁驱动、光驱动等多种多样的软驱动器,但它们在软体机器人系统中的集成水平和驱动能力仍然与生物系统相去甚远。
近日,上海交通大学机械与动力工程学院张文明教授课团队提出了一种自矢量电磁软体机器人的新概念,构筑了完整的基于内嵌微流道弹性体和可重构液态金属线圈的软电磁驱动器实施方案,发展了基于洛伦兹力和矢量合成原理的高维度驱控的新方法,实现了软电磁机器人中任意子域模块的即时主动和可选择性调控,解决了通过有限数量驱动器实现软体机器人的高效可重编程高维变形和多模式运动及转换的难题,为开发媲美自然界生物体的高灵活度和高集成度的软体机器人系统提供了更多可能性。
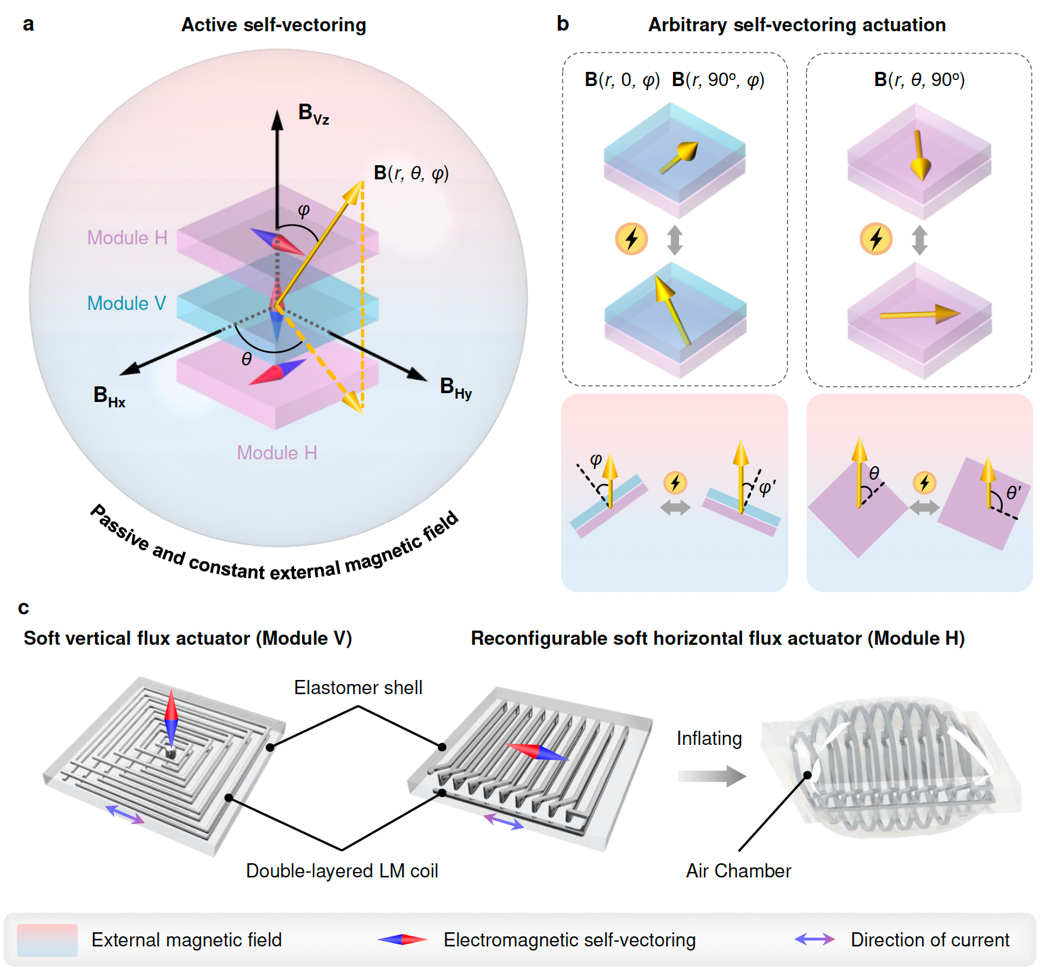
主动自矢量软体电磁驱动模块设计和静磁场下的自矢量高维驱控原理
该工作以“Self-vectoring electromagnetic soft robots with high operational dimensionality”为题发表于Nature Communications期刊。同济大学李汶柏研究员是第一作者和共同通讯作者,上海交通大学博士生陈虎越是共同第一作者,上海交通大学机械与动力工程学院张文明教授和密西根学院邵磊教授是共同通讯作者。
该“自矢量软体机器人”利用嵌入的液态金属制造出可重构的两类典型的软电磁线圈,即具有垂直电磁矢量的平面螺旋线圈和具有水平电磁矢量的三维可重构螺线管线圈,通过提出的不同重构策略将两类基本模块的复合叠加实现了三维空间内任意方向的矢量合成。模块化的“自矢量机器人”通过简单的电流控制即可实现即时高效的可重新编程、独立的子域驱动和全方向的矢量操控,通过最少数量的驱动器展示了更高维度的变形和运动。“自矢量”策略将为人机交互、医疗应用、主动超材料等领域带来新的启发。
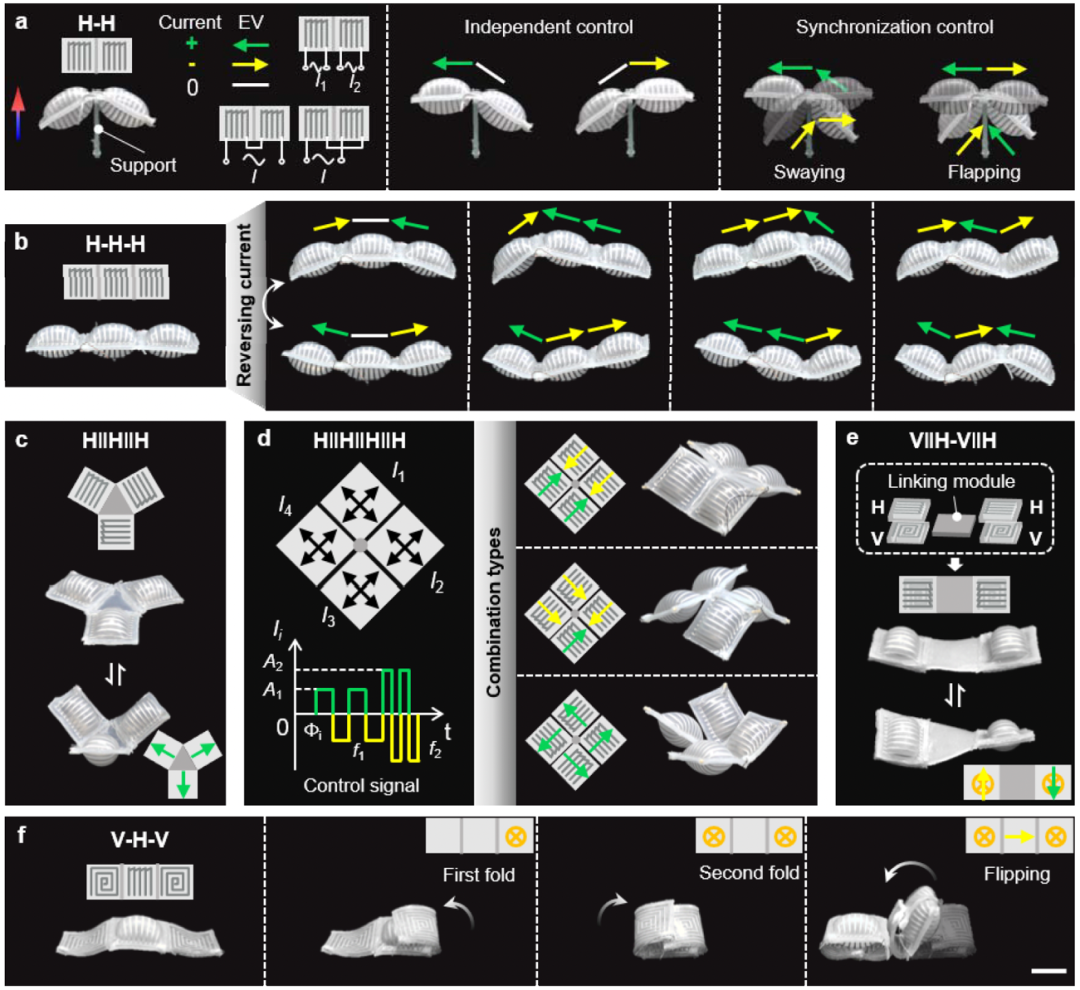
“自矢量”策略赋能的即时可重新编程变形
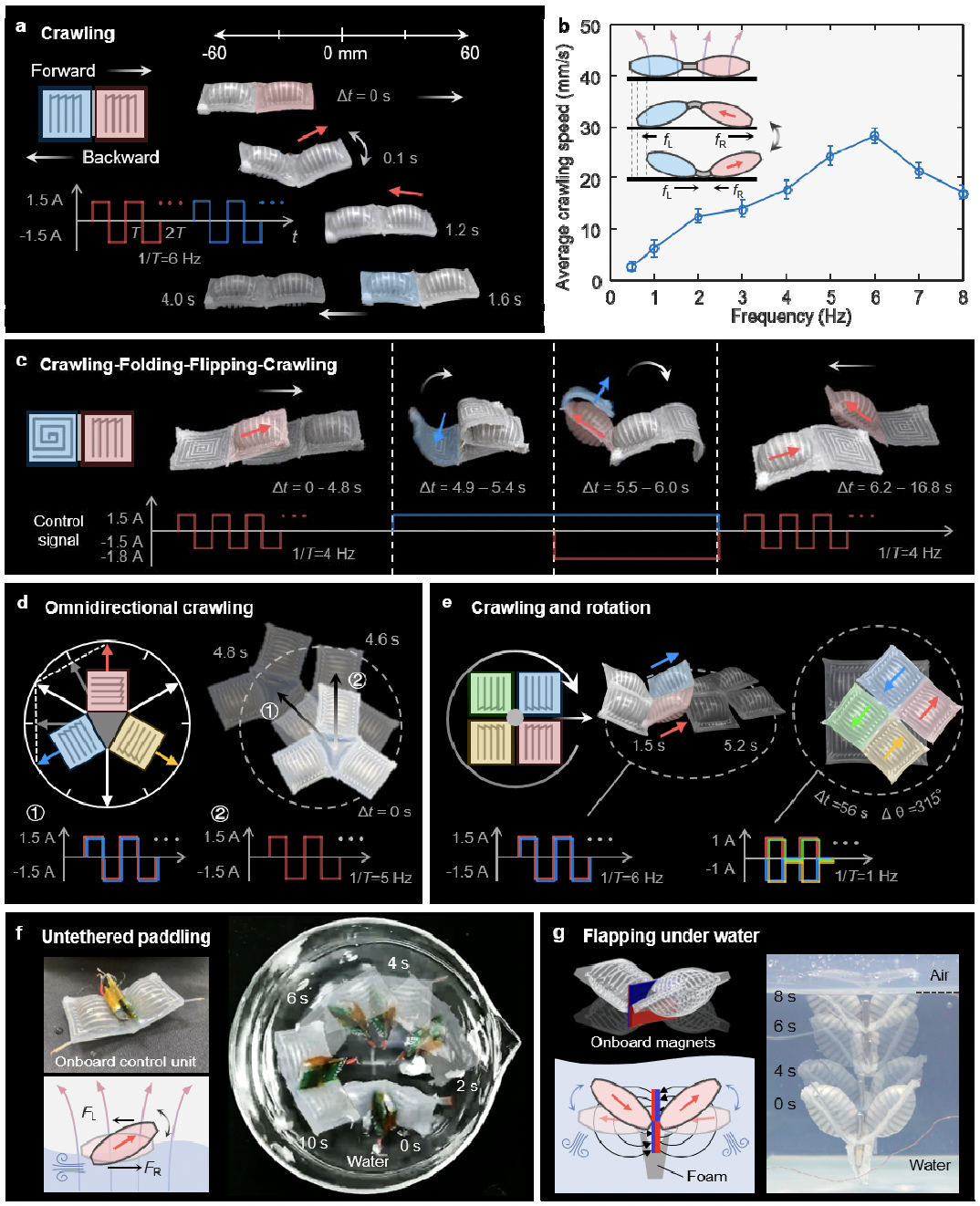
“自矢量”策略操控的水陆两栖多模式运动
论文链接: https://doi.org/10.1038/s41467-023-35848-y
审核编辑 :李倩
-
高压放大器在软体机器人领域的应用2023-10-13 1242
-
基于磁场驱动的无线微型软体机器人应用2023-09-16 1475
-
一种基于磁场驱动的软体微型机器人2022-06-09 3479
-
研究人员制造出一种可以挖洞的软体机器人2021-06-26 2832
-
功率放大器基于振动驱动的旋转及攀爬软体机器人的研究2021-04-09 3320
-
创造一个不受外界帮助的软体机器人2021-03-31 3208
-
研究人员已成功研发出一种新型的磁驱动高速软体机器人2020-09-27 2814
-
一种新型软体机器人——LEAP机器人2020-06-11 2999
-
科学家们开发出了一种新的软体机器人,无需动力就能改变形状2019-08-27 3778
-
软体机器人学习问题探讨2019-08-12 4762
-
MIT开发出一种为软体机器人设计的新型模拟器2019-07-10 2089
-
软体机器人 前所未见的机器人2018-05-17 4308
-
一种新型的长臂式仿生生软体机器人结构2018-03-07 1242
-
模仿蚯蚓开发软体机器人2015-01-19 13286
全部0条评论

快来发表一下你的评论吧 !
