

自制无刷电机控制器:画板、打样、焊接、调试
描述
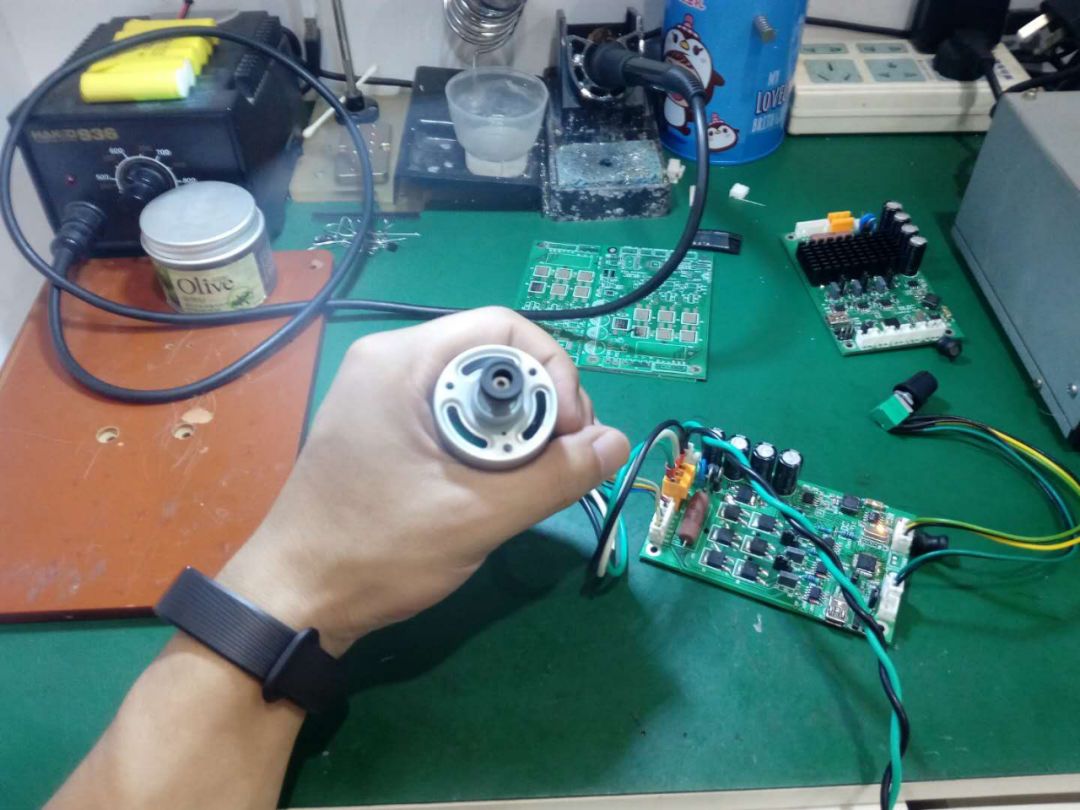
很早之前就想做一款无刷电机控制器,忙于工作一直没有弄。最近有点时间画板,打样,焊接,调试,总算顺利的转起来。期间也遇到很多问题,上网查资料,自己量波形前前后后搞了差不多近一个月,(中间又出差一周)总算搞的差不多了,特意写个总结。
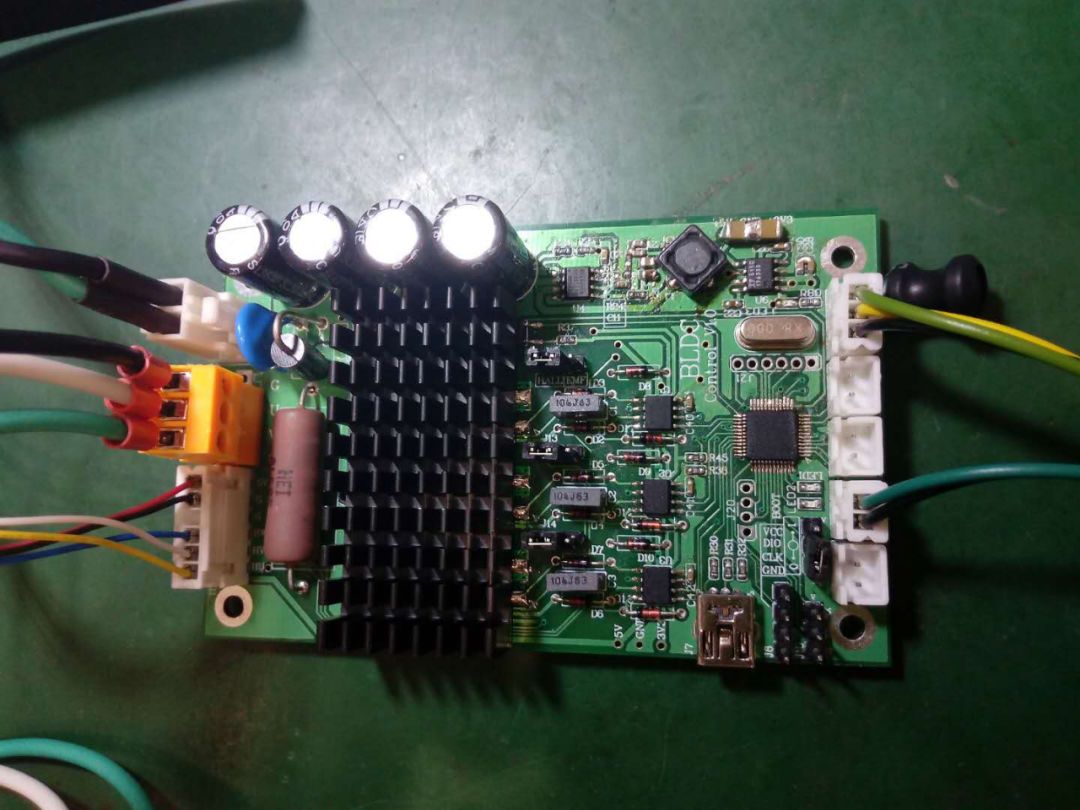
板子外观100*60mm 中等大小。DC 12V输入,设计最大电流10A.(实际没试过那么大的电机,手头的电机也就5 6A的样子)硬件上可以切换有感(HALL)和无感(EMF)两种模式,外部滑动变阻器调速 预留有 PWM输入、刹车、正反转、USB和uart等接口。
先来说下原理无刷电机其实就是直流电机,和传统的DC电机是一样的,只是把有刷的电滑环变成了电子换向器。
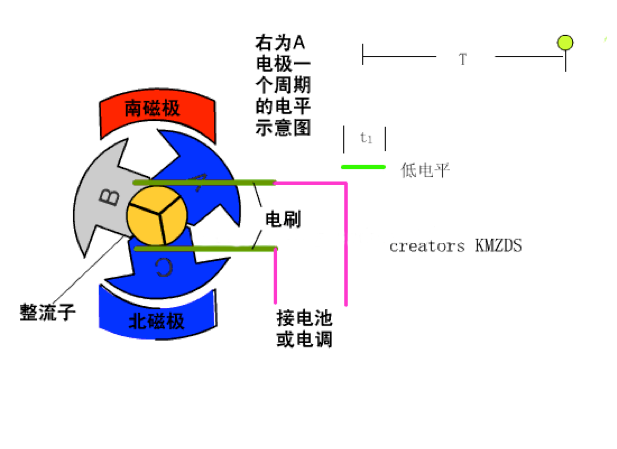
因为少了电滑环的摩擦所以寿命静音方面有了很大的提升,转速也更高。
当然难点就在如何获取当前转子的位置好换相,所以又分为两种有感和无感。
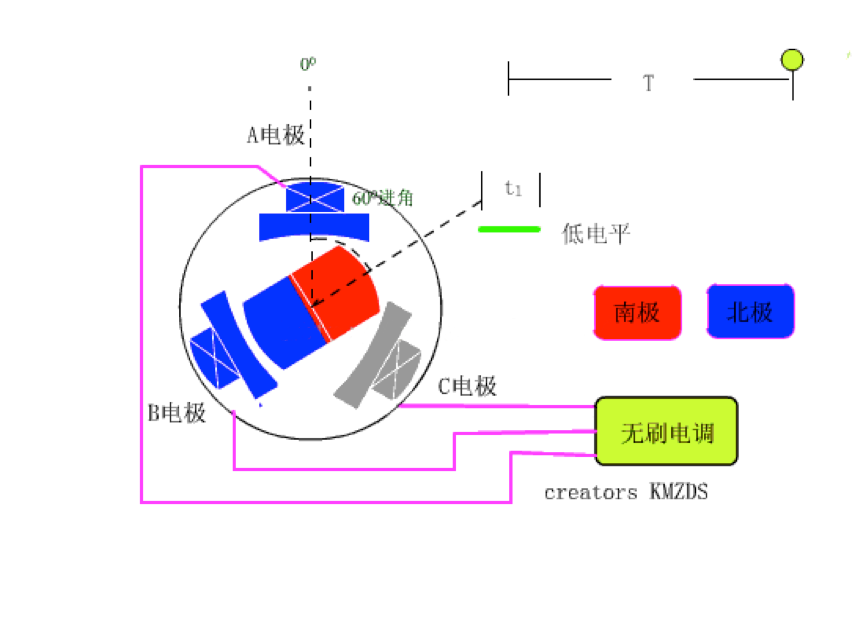
有感就是在电机端盖的部位加装霍尔传感器分别相隔30度或60度。无感就是靠检测悬浮相的感应电动势过零点(后面在细讲)。
当然各有各的优缺点,有感在低速方面好,可以频繁启停换相。无感的结构简单成本低,航模上应用居多。
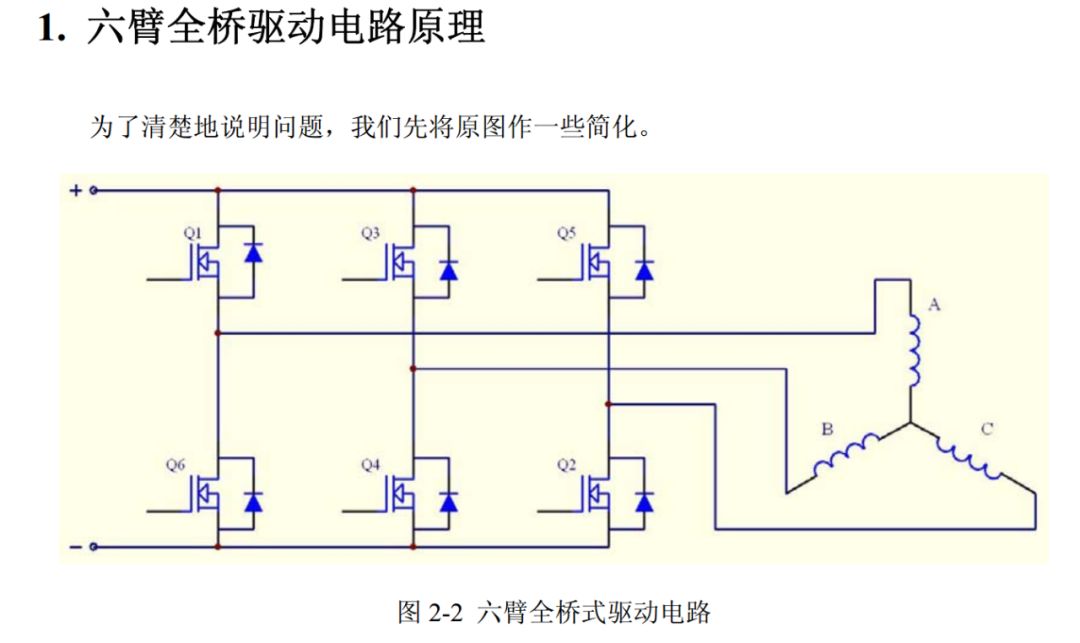
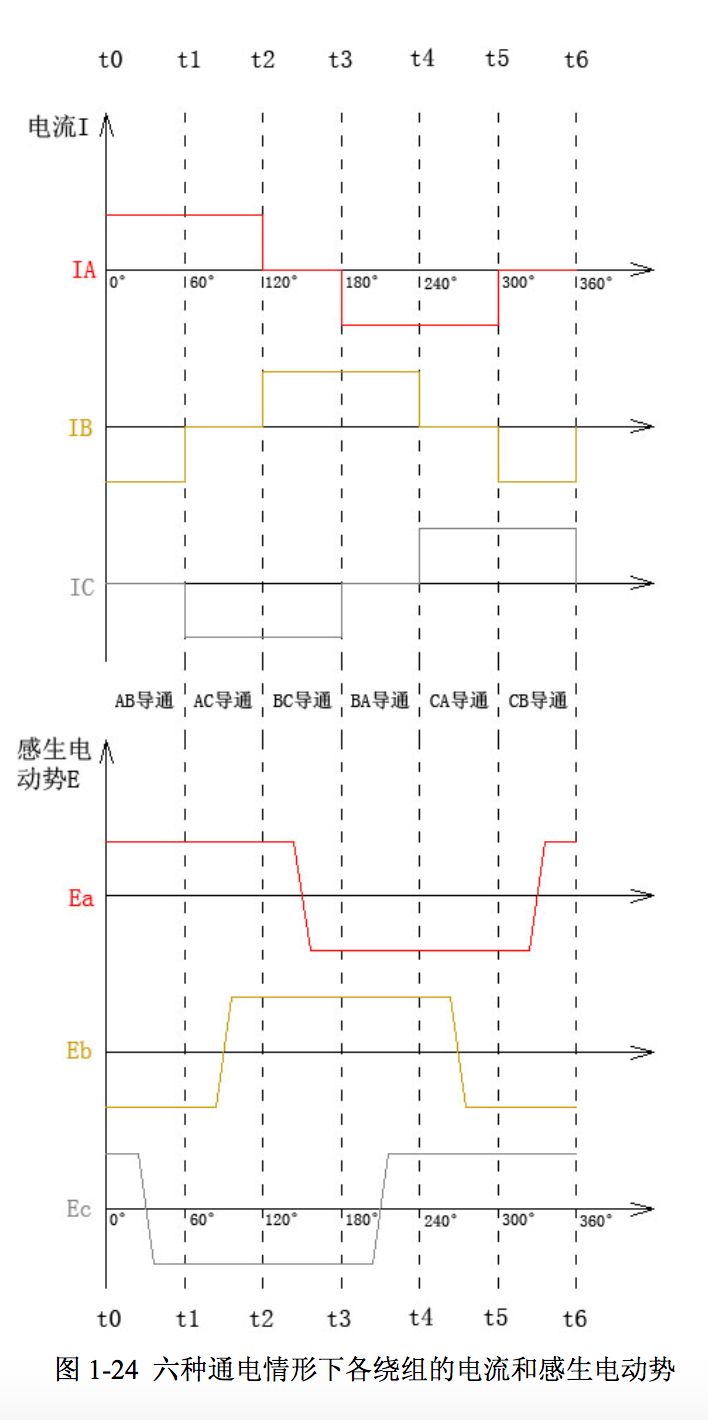
先说有感,电源首先被分成了3个绕组U V W这个交流电还是有区别的。
它只是3个h桥按一定的顺序导通模拟出来的,本质还是直流电。电机靠hall位置按一定顺序换相,转速与电压电流有关。这一点切记,不是换的越快转的越快。(位置决定换相时刻,电压决定转速)一般调速就是调电压,6步pwm方式是目前常用的。当然后续还有foc等更好算法。
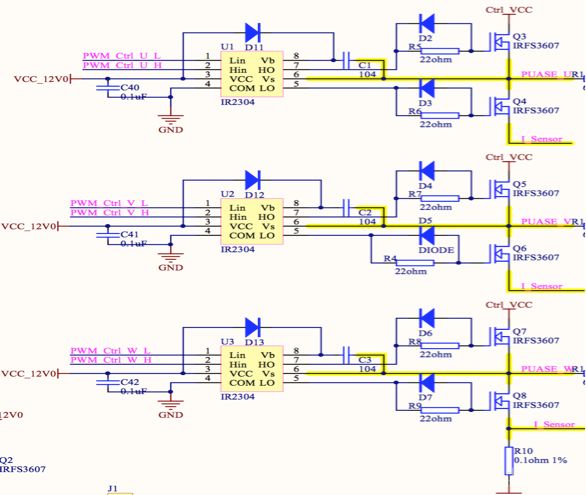
硬件部分网上基本都是成熟的方案。三相H桥,H桥一般有上臂mos和下臂mos组成,如果只是简单的做演示上臂选pmos下臂选nmos控制电路简单直接用单片机的io就可以驱动。但是pmos低内阻的价格高。功率上面很难做大。
这也就是为什么基本所有的商业控制器全是nmos的原因。
但是上臂用nmos存在一个问题vgs控制电压大与vcc 4v以上才能完全导通。为了简化电路采用了ir公司出的驱动ic,它内部有自举升压电路。外部仅需一个续流的二极管及储能电容即可。
有感模式控制相对简单,3个霍尔传感器输出一般都是数字信号,分压后直接接单片机io。
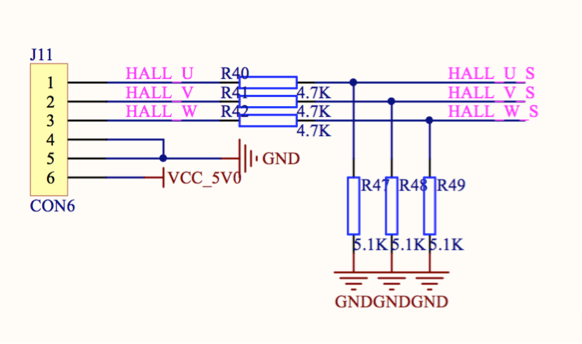
当然控制方式上也就简单很多,三个霍尔接中断输入,在中断处理程序中根据组合状态换相,程序上也没什么复杂的。主程序 一直检测ad值,改变pwm占空比,及电流保护等。
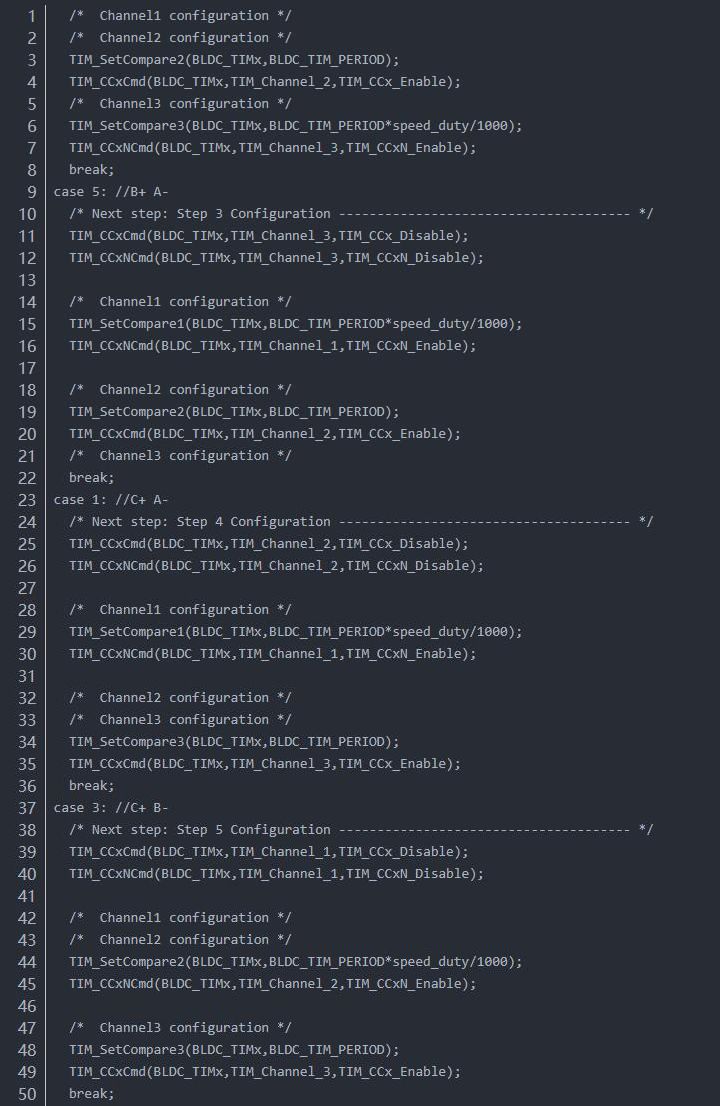
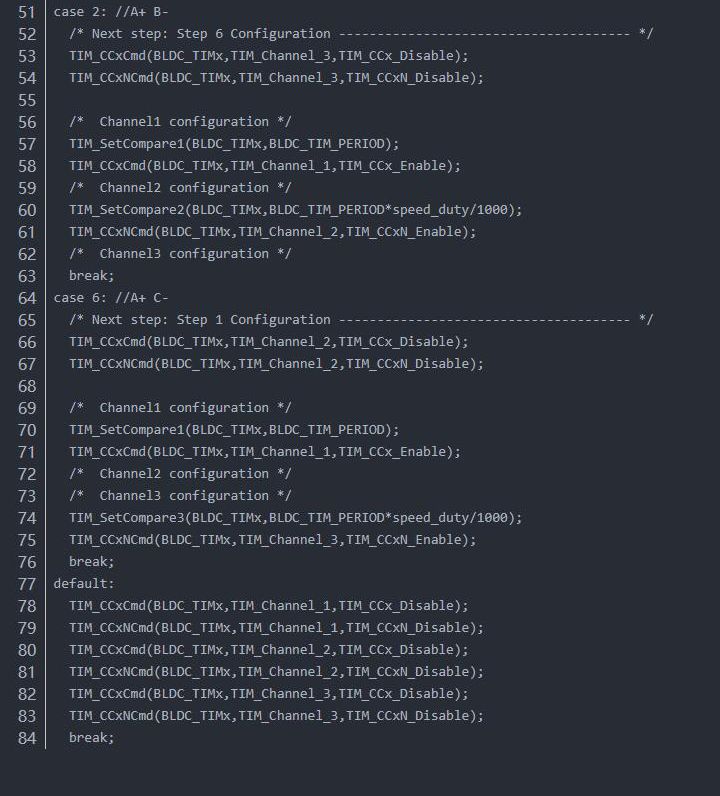
如下一个典型的换相代码。Stm32 有两个高级定时器tim1 tim8 可以输出4组互补型pwm,还可以设定死区时间等,使用上非常方便。
switch(step)
{
case 4: //B+ C-
/* Next step: Step 2 Configuration -------------------------------------- */
TIM_CCxCmd(BLDC_TIMx,TIM_Channel_1,TIM_CCx_Disable);
TIM_CCxNCmd(BLDC_TIMx,TIM_Channel_1,TIM_CCxN_Disable);
}
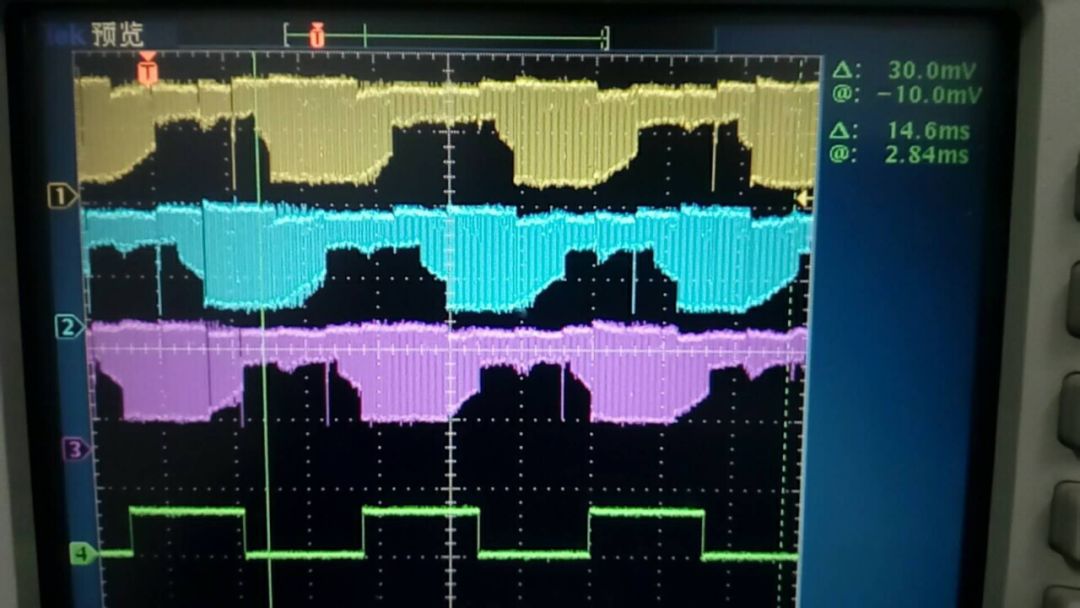
下图为uvw三相的霍尔检测到的电平及w相的波形。
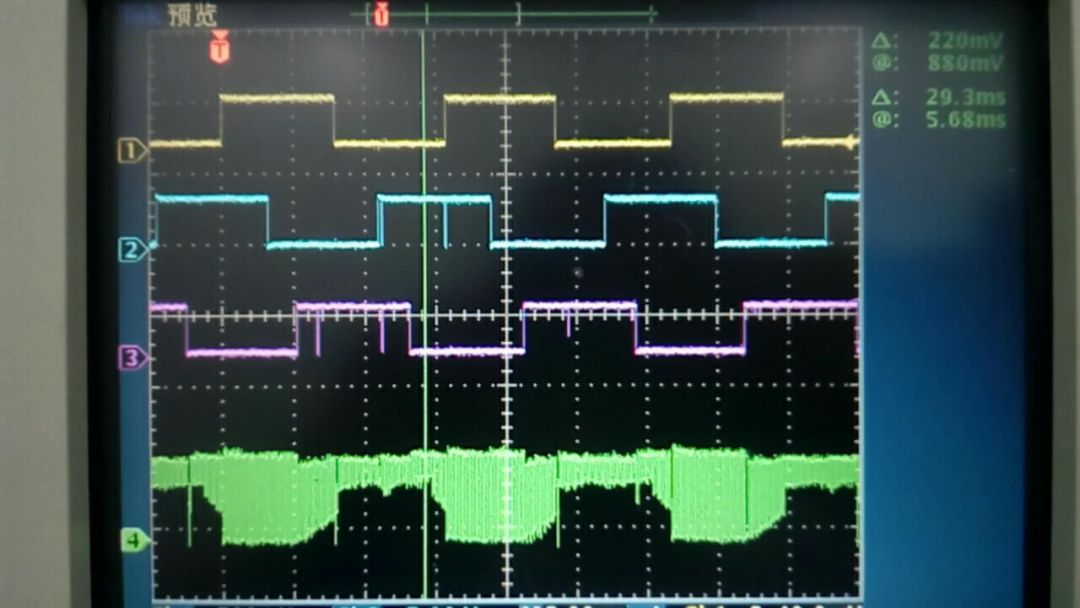
下图为 uvw三相波形及w相霍尔电平
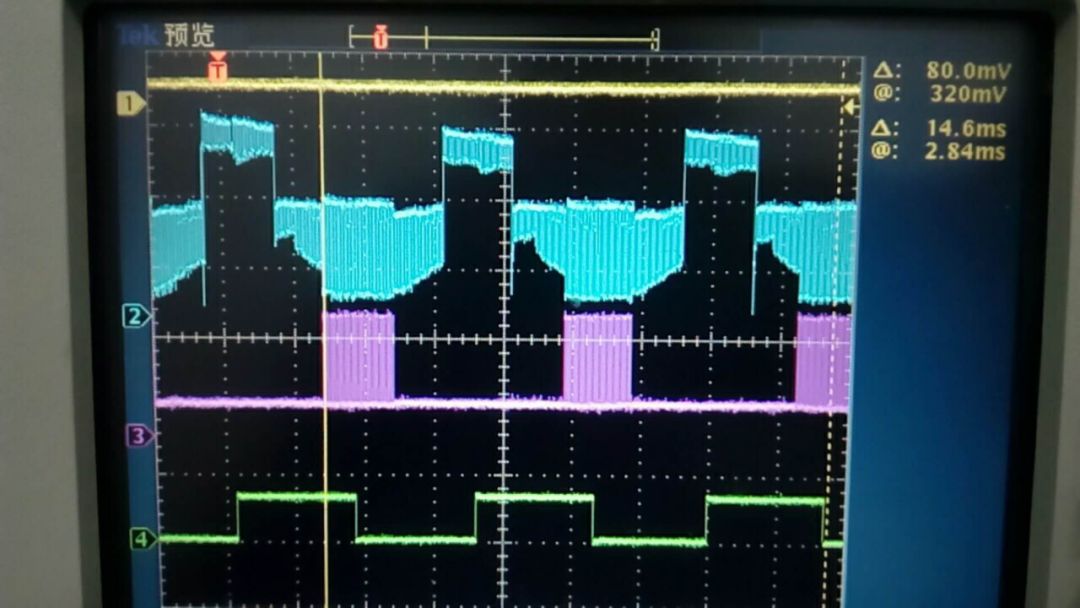
下图为 w相电平, w相上臂on 下臂pwm ,w相霍尔信号。
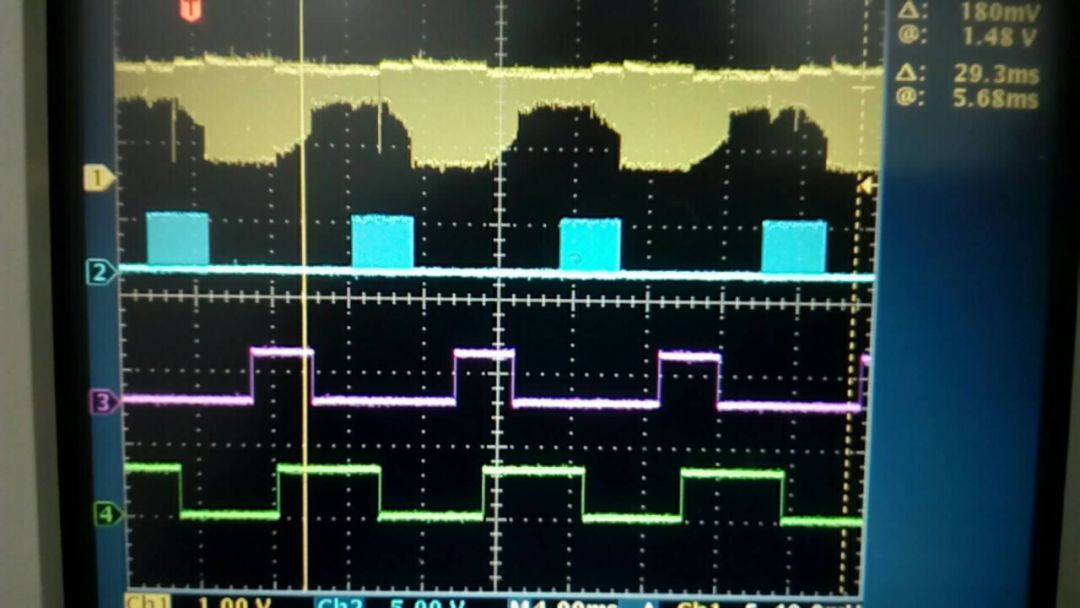
下图为w相ir2304芯片输出,上臂电压可明显看到已高于vcc,下臂为pwm信号
在说说无感模式,由于没有了霍尔,电机无法知道转子当前的位置所以就无法换相,而感应电动势也只有在转起来之后才有,所以无感模式的启动是个难点。
一般方法都是分三段法:1 预定位 2 启动 3 进入闭环反馈
正如网友说的江湖一层纸,戳破不值半文钱。
1. 预定为就是强制给某一相通电一段时间,让电机定位到这个位置。占空比30-50%不要太大,可能会发热。
2. 启动,就是逐步的强制换相,当然要有个加速的过程,使电机转起来。
这个过程太慢会抖动反转,太快会丢步。参数需要一点点试,有点像控制步进电机。要能使电机转的能产生电动势,我也是参照的德国MK 电调的算法。
每次延时时间比上一次少1/25,形成一个加速的过程,直到电机完全转起来产生足够的电动势。
3. 闭环反馈控制换相跟有感差不多一样。
speed_duty=30; //30% start
BLDC_PHASE_CHANGE(Step[Phase]); //固定一相
Delay_MS(200);
speed_duty=pwm;
timer = 300;
while(1)
{
for(i=0;i
{
Delay_US(120); //等待
}
timer-= timer/25+1;
if(timer < 25)
{
if(TEST_MANUELL)
{
timer = 25; //开环强制换向
}
else
{
bldc_dev.motor_state=RUN;
break;
}
}
Phase++;
Phase %= 6;
BLDC_PHASE_CHANGE(Step[Phase]); //
}
说到感应电动势很多人不明白,先来说说电流,电机线圈的内阻通常很小比如0.2欧,电机的电压比如10v,按理来说电流100a为何电机不烧哪?
其实电机线圈在通电的一瞬间并不是完全导通的,因为有反向电动感应势的存在,可能有-9.8v。10v-9.8v = 0.2v /0.2 = 1A.这样算起来电流还合理。
在说说那个初中学习的法拉第 ,当线圈切割磁场时会产生感应电动势,根据右手定则。。。。。。。。不懂的自行上网搜。
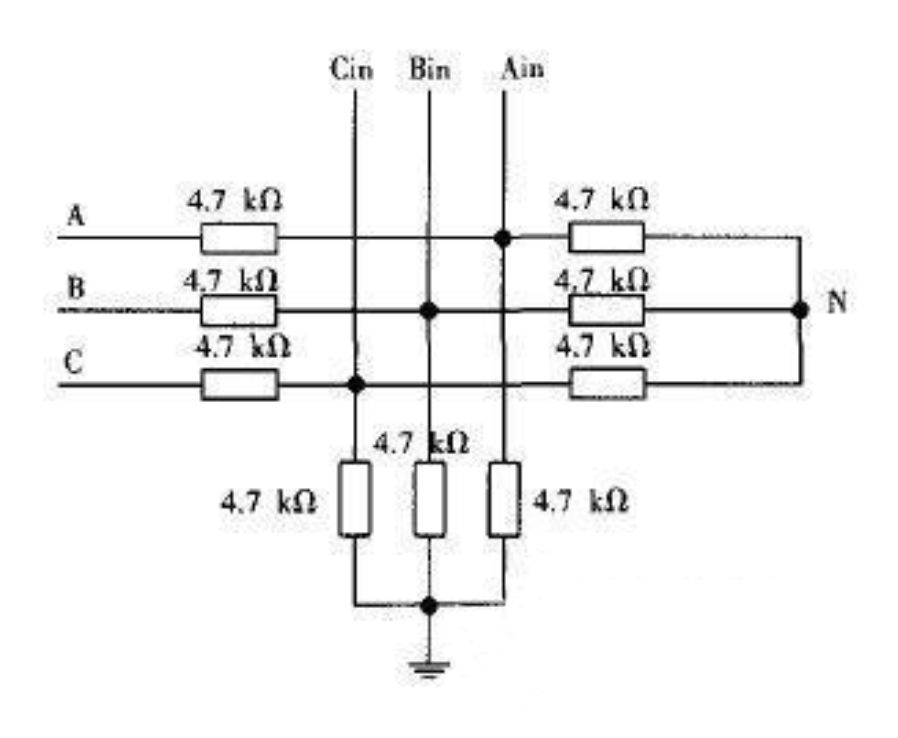
如下图当ac相在通电12v的情况下,静止状态下正中间中性点理论为6v,但是转起来就不一定了,因为b相实际是在切割磁场,是会产生电动势的。而电动势的大小正负取决与当前在磁场ns极的位置。当切割ns时为-1,切割sn时为1,平行时为0.
利用这一特性不就刚好可以获得转子的位置吗?
首先检测电路网上已经一大很成熟了。
如下图,当然很多时候需要在4.7k对地的电阻上并一个100nf的电容,做一个低通滤波。也可以在软件中做滤波处理。
我们所要做的就是检测这个悬浮相的电动势过零点。
网上常用的两种方法:1 单片机ad采集;2 比较器比较。我选择了比较器lm339价格已经很便宜了,在高速上比ad有明显优势,只要比较cin bin ain 与n点的压差即可获得零点。
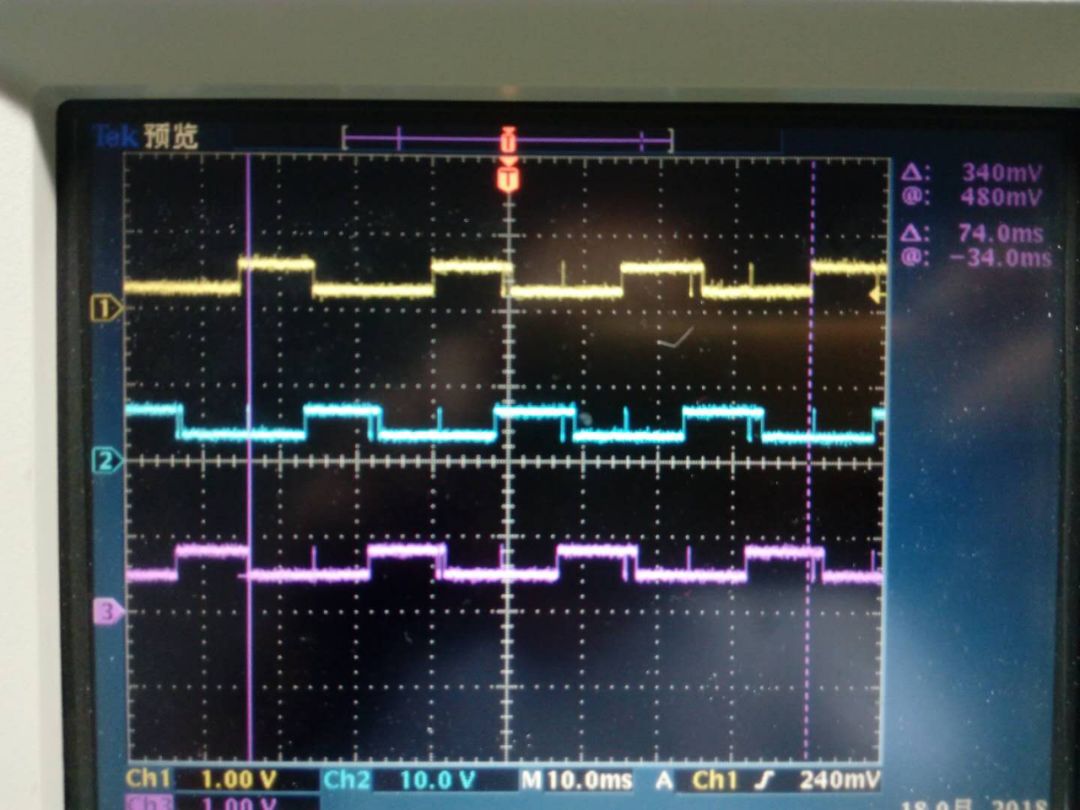
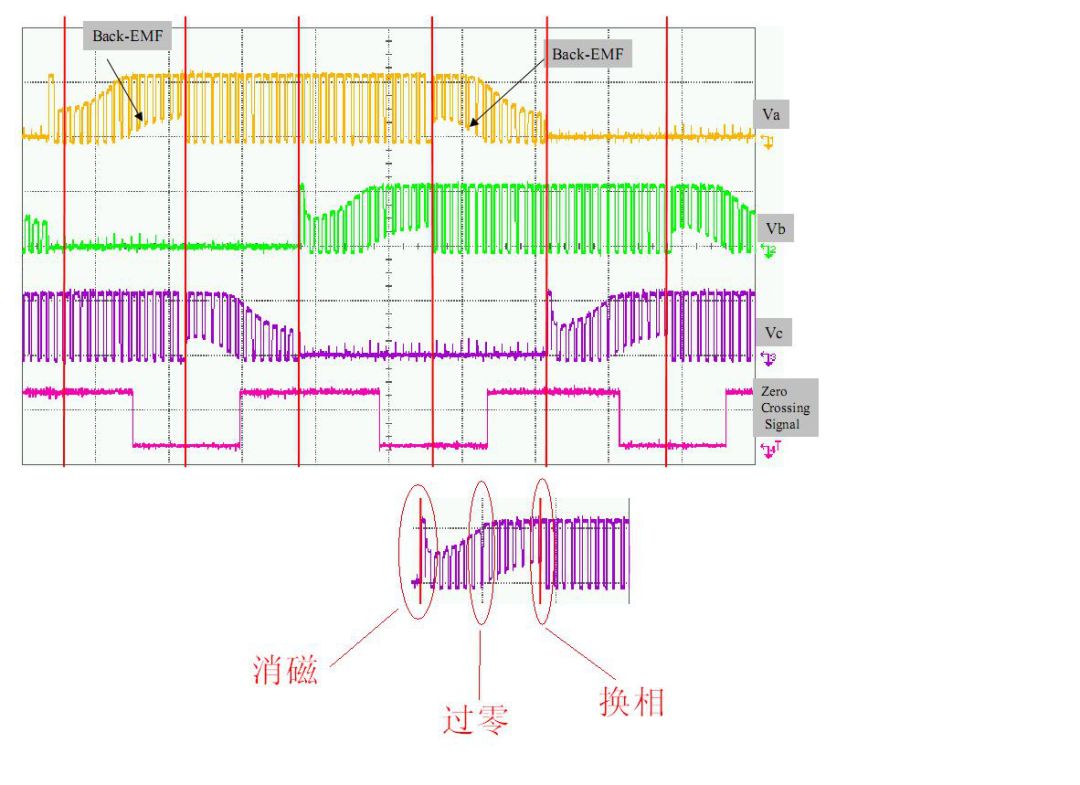
理想很完美,现实很残酷,实际中根本得不到这么完美的波形。
为什么会有这些毛刺哪,有些还挺有规律。
参考了网上的介绍,这中间还有一个叫消磁的东西。
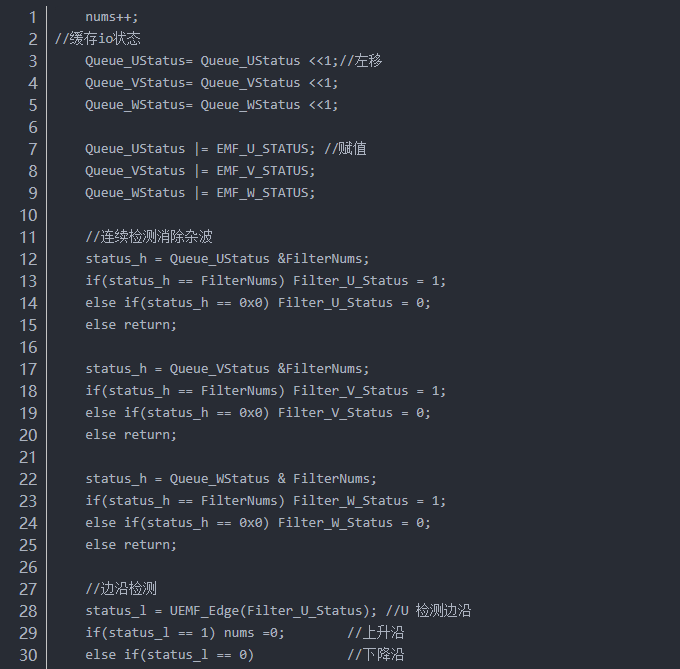
原理不深究了,反正时间很短,软件上做一个滤波消掉就可以了。
进入中断函数后做如下处理 ,定时器的中断我暂时用的20us。
const unsigned int FilterNums = 0xff;
static unsigned int nums =0;
static unsigned int Queue_UStatus =0;
static unsigned int Queue_VStatus =0;
static unsigned int Queue_WStatus =0;
static unsigned char EMF_SVal =0;
unsigned char Filter_U_Status=0;
unsigned char Filter_V_Status=0;
unsigned char Filter_W_Status=0;
unsigned char EMF_Val=0;
unsigned int status_h;
unsigned int status_l;
unsigned int Delay30deg =0;
/* 清除中断标志位 */
if ( TIM_GetITStatus(TIM3 , TIM_IT_Update) != RESET )
{
TIM_ClearITPendingBit(TIM3 , TIM_FLAG_Update);
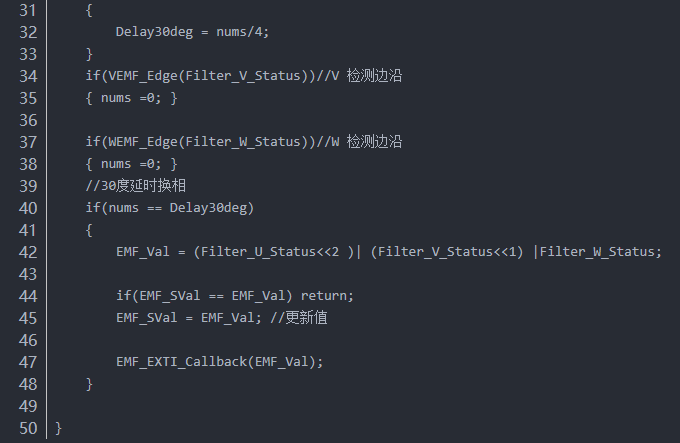
至于网上说检测到过零点后,延时30度换相,对电源效率有影响。我试了下,好像没什么明显的差异。也有人说在大功率的电机下不延时反而更平滑等等。真实怎样有待各位实际实验了。
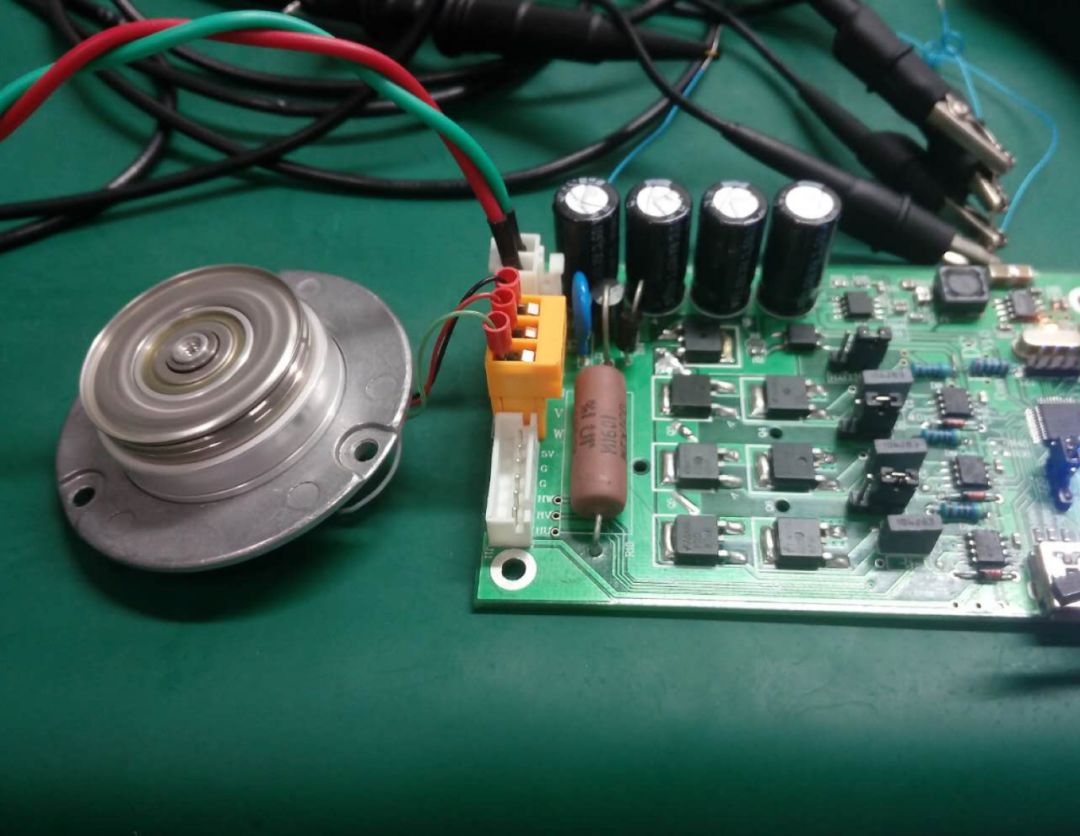
最后秀几张转起来的照片
硬盘电机 无感模式
电动工具电机 有感模式
加装散热片的样子
审核编辑 :李倩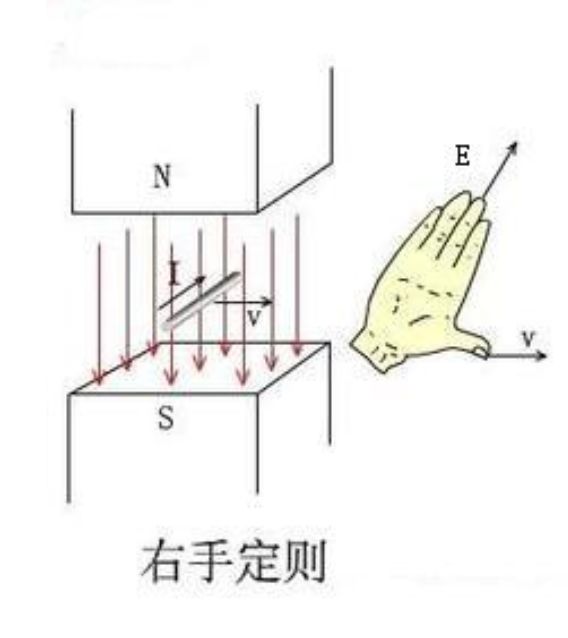

如下图,这个已经是比较好的了,还是有很多毛刺。这个给单片机中断,肯定一大堆问题,严重的换错相烧mos管。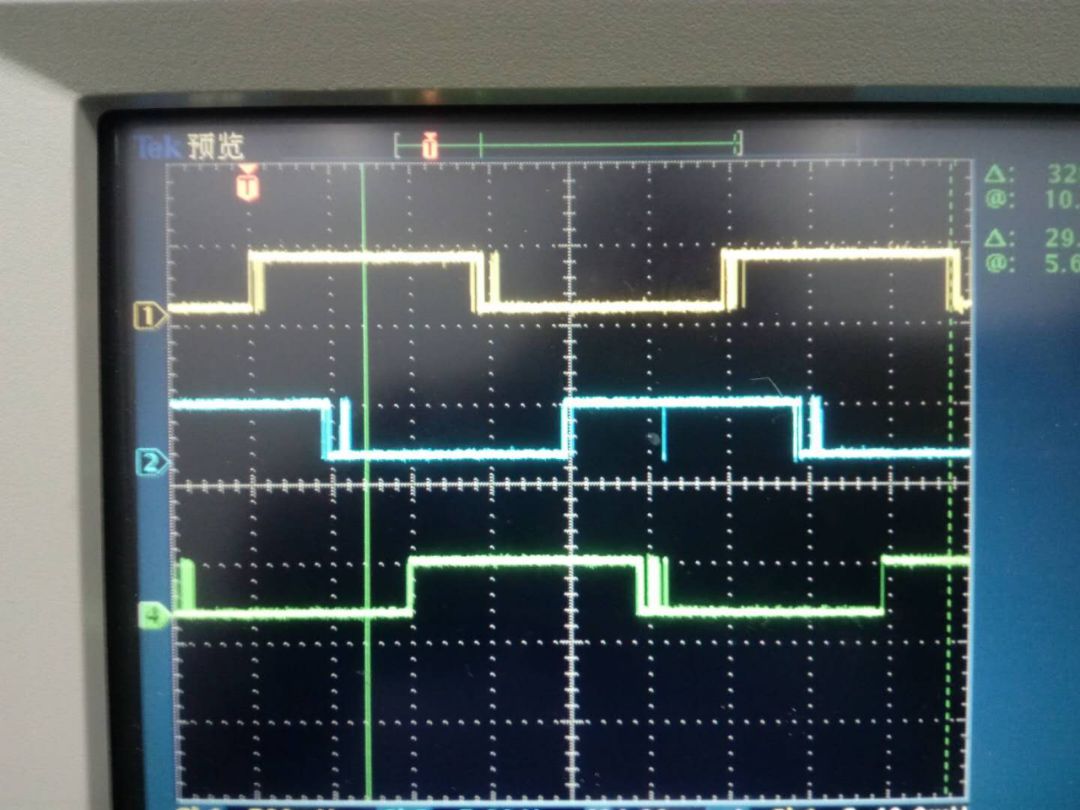

-
自制无刷电机控制器2023-10-16 2880
-
无刷电机常见故障 无刷电机控制器坏了怎样维修2023-03-08 20096
-
用于无刷电机控制器设计的两芯片解决方案2022-11-15 1054
-
无刷电机的定向磁场控制与调试方法合集2021-12-06 945
-
直流无刷电机控制器程序流程图2021-09-18 3010
-
无刷电机控制器限速线在哪2021-08-26 14659
-
无刷电机控制器原理是什么?2021-07-21 2683
-
请问怎样去设计无刷电机控制器?2021-04-29 2207
-
请问如何自制一款无刷电机控制器?2021-03-16 2145
-
大神的实战作品:自制无刷电机控制器2020-08-05 7161
-
直流无刷电机方波控制2020-05-11 4099
-
STM32F103做主控自制无刷电机(BLDC)控制器 有感/2019-09-02 3370
-
永磁直流无刷电机的控制器的研究设计2016-04-27 801
-
基于DSP的直流无刷电机控制器的硬件设计2009-10-30 3755
全部0条评论

快来发表一下你的评论吧 !
