

了解LVDT解调器电路的基础知识
描述
了解哪里需要解调器电路,以及如何使用二极管整流器将LVDT(线性可变差动变压器)的交流输出转换为直流信号。
在上一篇文章中,我们研究了 LVDT传感器的结构和操作。
在本文中,我们将了解如何将二极管整流器用作解调器电路,将LVDT的交流输出转换为指示内核位置的有用直流信号。
对解调器的需求
当LVDT的磁芯完全居中时,两个次级绕组V上会出现极性相反的相等电压S1 = -VS2 和 V外 = 0。
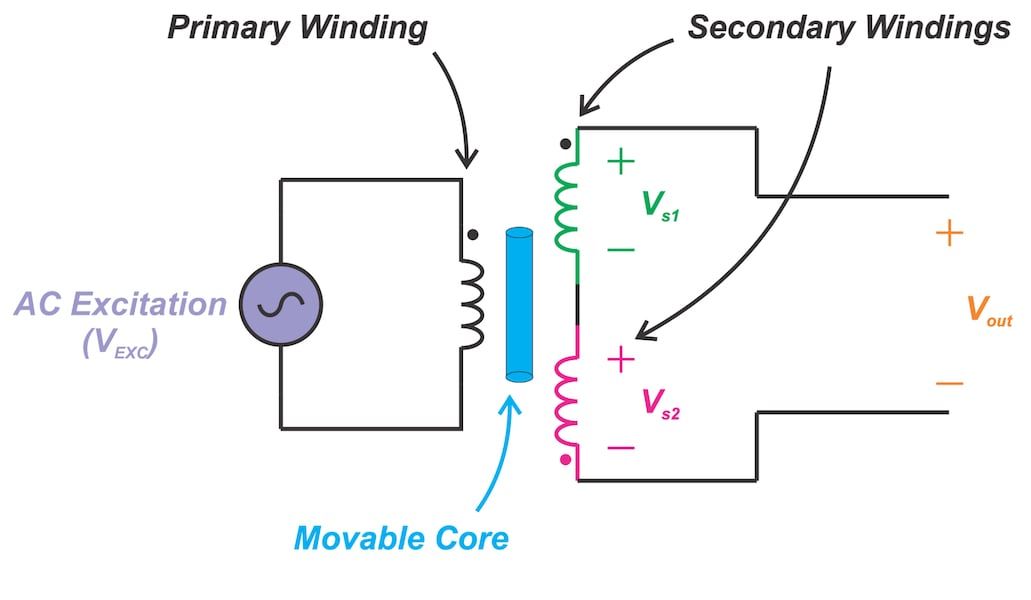
图1
当磁芯沿给定方向远离中心时,其中一个次级线圈上的电压增加,另一个次级线圈上的电压随磁芯位移线性降低,因此,幅度为 V外 增加。 如果我们转换 V外
进入直流信号后,我们可以确定铁芯位移的量。
但是,不知道V的相位外
关于激励电压(V执行),我们无法确定核心在哪个方向上位移。 因此,我们需要一些电路来成功解释LVDT输出,以确定位移量和磁芯位移方向。
在LVDT信号调理中,解调器是将LVDT的交流输出转换为直流信号的电路,其幅度和极性揭示了内核位置。 基于整流的解调器和同步解调器是可与LVDT器件配合使用的两个主要选项。
二极管半波整流器
图2所示的二极管半波整流器可用作LVDT解调器。
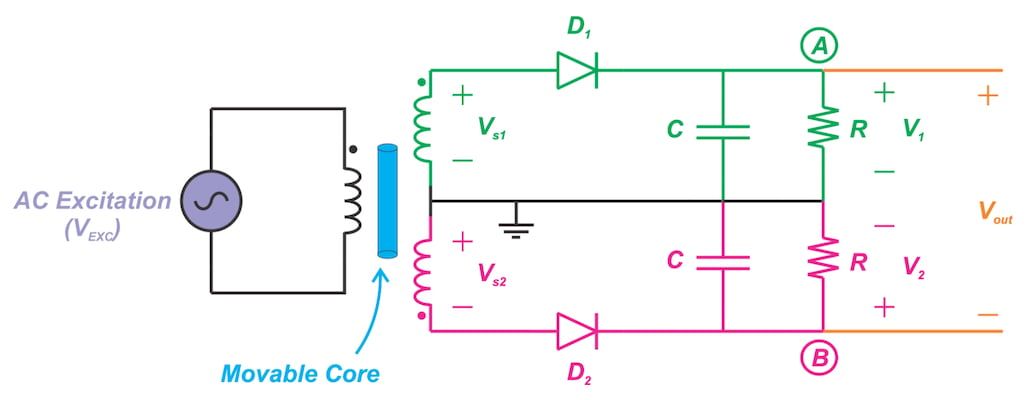
图2
来自第一个次级的电压(VS1) 通过 D1 和上部 R 和 C 产生的半波整流器进行整流。 同样,V的整流版本S2 出现在节点 B
处。 输出是这两个直流电压之差,即V外 = V1 - 五2.
检查二极管解调器的波形
为了获得更深入的见解,让我们进行一些仿真并检查二极管解调器的操作。 假设我们有 V执行 = 4sin(2π x 2500 xt)。 此外,假设在零位置,两个 V 的振幅S1 和 VS2 等于 4 V; 但是,由于给定的磁芯位移,两个次级两端的电压变为:
VS1 = 4 x (1+0.3) x sin(2π x 2500 x t)
等式 1
VS2 = -4 x (1-0.3) x sin(2π x 2500 x t)
等式2
在这里,我们假设第一个次级的幅度比零点位置幅度增加了1.2 V; 第二个次级的幅度减小了相同的值(1.2V)。 我们可以使用以下LTspice原理图来模拟此示例:
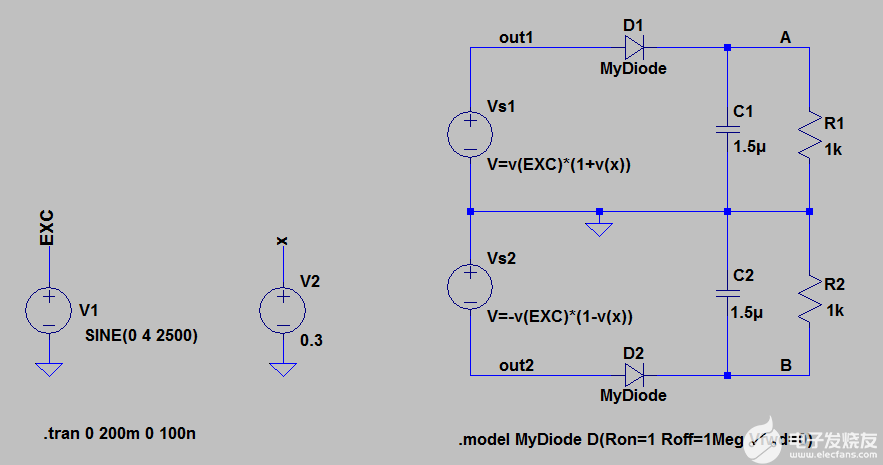
图3
在此原理图中,电压源VS1 和 VS2 是LTspice的“任意行为电压源”,用于产生公式1和2给出的电压。 例如,VS1 等于节点 EXC 的电压
v(EXC),乘以因子 1 加上节点 x 处的电压,即 1+v(x)。 节点EXC的电压为激励电压,节点x处的电压为0.3。 这给了 VS1 = v(EXC) x
(1+0.3) = (1+0.3) x 4 x sin(2π x 2500 x t),与公式 1 相同。
二极管 D1 和 D2 是 由LTspice定义的理想二极管.model语句。 当R=1 kΩ和C=1.5
μF时,我们得到上半波整流器的以下波形:
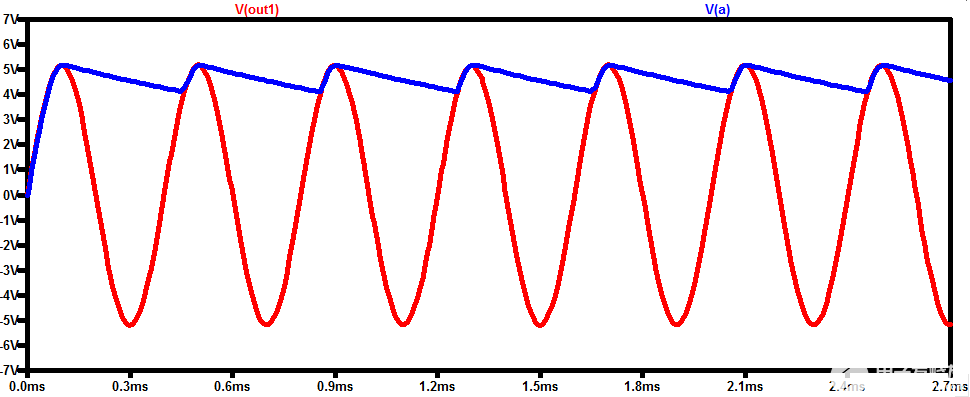
图4
忽略电压纹波,节点A的直流值约为4.66 V。 对于下部整流器,我们得到以下波形。
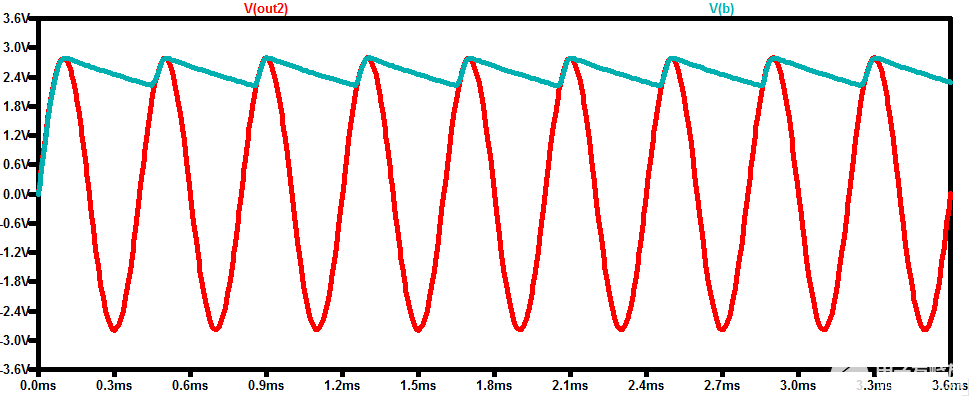
图5
节点B的直流值如预期的那样小(约2.51 V)。 输出是这两个直流电压之间的差值,直流值约为2.15
V。 输出的大小与铁芯位移的大小成正比。 考虑到输出的极性,我们知道| VS1|》 | VS2|。 这揭示了核心的位移方向。
模拟机械带宽为 250 Hz 的系统
现在,让我们在假设附着在磁芯上的物体的运动具有 250 Hz 的正弦波形的情况下检查上述系统:
核心运动 = 最大位移 x 正弦(2π x 250 x t)
由于LVDT输出的幅度随磁芯位置线性变化,我们得出结论,VS1 和 VS2 可以用以下等式表示:
VS1 = 4 x (1+x) x sin(2π x 2500 x t)
等式3
VS2 = -4 x (1-x) x sin(2π x 2500 x t)
等式 4
其中 x 是 250 Hz 时的正弦曲线。 假设对于给定的 LVDT,x 的振幅为 0.3。 因此,我们有
x = 0.3 x sin(2π x 250 x t)
我们可以使用以下LTspice原理图来模拟此示例:
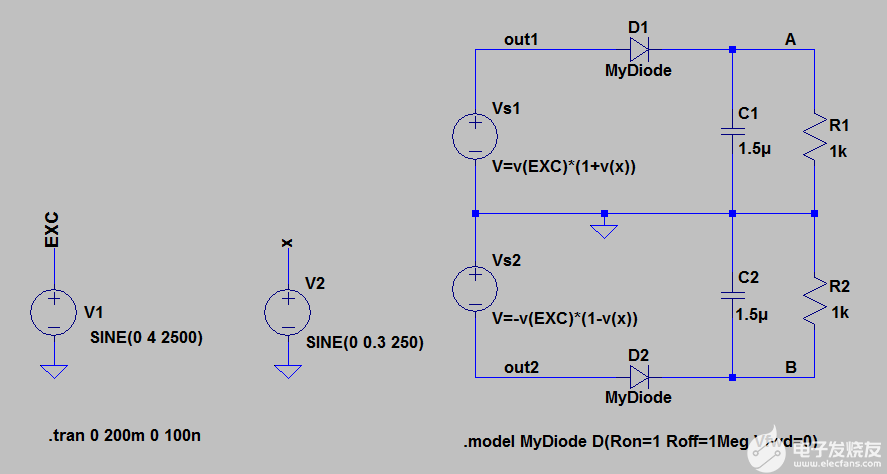
图6
这与前面的示例相同,只是 V 振幅的变化S1 和 VS2 遵循正弦波形 (v(x)=0.3×sin(2π×250×t))。 节点 out1 和 A
处的电压如下所示。
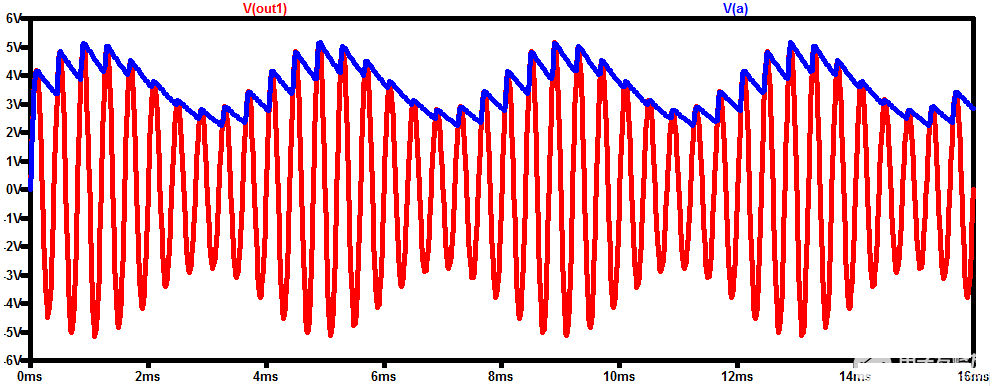
图7
如您所见,次级两端的电压是一个正弦波形,其幅度由核心位置调制(在我们的模拟中,幅度实际上是由x调制的,假设是核心位置的函数)。 这就解释了为什么用于提取内核位置信息的电路称为解调器。
对于下部整流器,我们得到的波形类似,如图8所示。
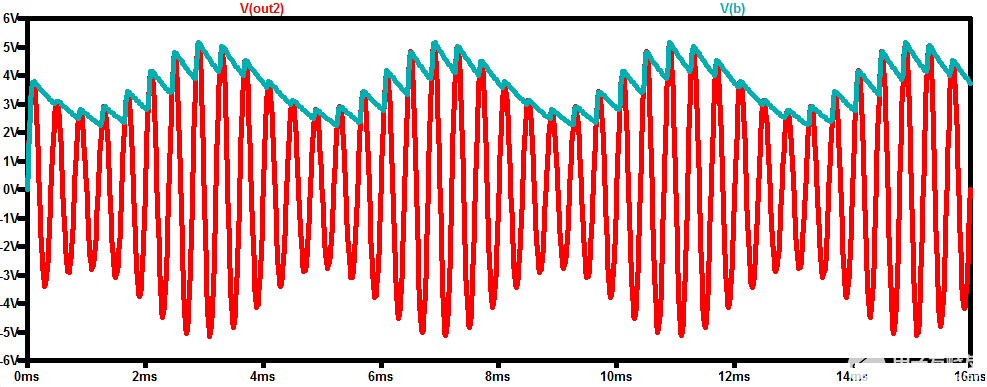
图8
下图中的红色曲线显示了最终输出(V外 = V(a)-V(b))。
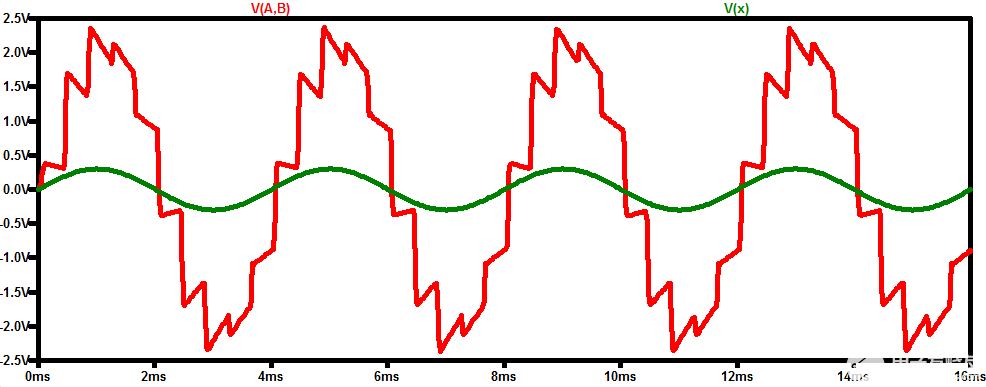
图9
虽然输出信号有一些突然的变化,但它看起来像x的放大版本,它是核心位移的函数。
因此,调制器输出似乎如预期的那样为我们提供了核心位置。 为了验证这一点,我们可以利用LTspice的FFT特性来查找输出电压的频率成分。 如图 10
所示。
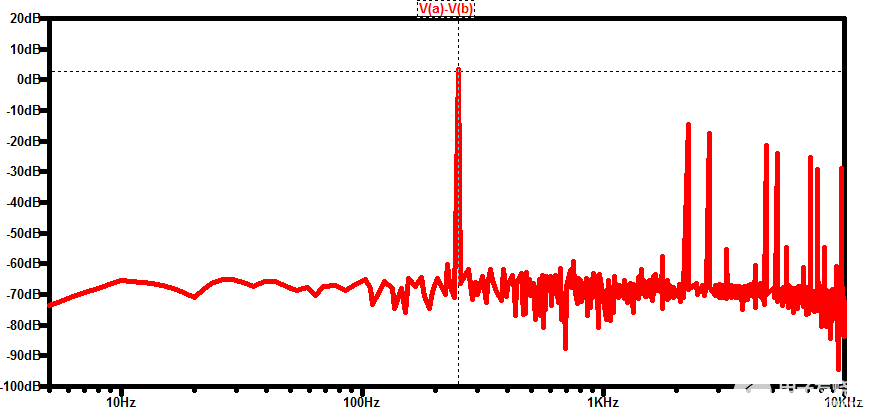
图10
输出FFT显示主频率分量为250 Hz,这是物体运动的频率。 还有一些高频元件可以在信号调理电路的后续阶段被低通滤波器滤除。
二极管半波整流器的局限性
上述仿真包含一个理想的二极管模型。 实际二极管表现出非零正向压降。 这可能导致LVDT输出幅度相对较小的情况出现非线性误差。 为了避免二极管I-V特性的非线性区域,即使磁芯与零点位置的最大距离,LVDT次级的幅度也应大于二极管的正向压降。
请记住,当磁芯处于满量程位移时,其中一个次级两端的电压处于最小值。 对于一些微型和专用LVDT,输出幅度可能相对较小,二极管正向电压可能会导致问题。
此外,二极管的正向压降是温度的函数(硅的温度系数约为-2.2
mV/°C)。 正向压降甚至会随着焊接过程引起的机械应力而变化。 另一种可能导致机械应力的机制是二极管体和电路板之间的热膨胀系数差异。 因此,为两个LVDT输出提供足够匹配的整流器可能具有挑战性。
除了二极管的正向压降外,还应匹配两条路径的阻抗,以避免两个次级响应之间不必要的不匹配。
精密整流器
为了规避二极管整流器的限制,我们可以使用图11所示的精密整流器来获得每个LVDT次级的直流值。
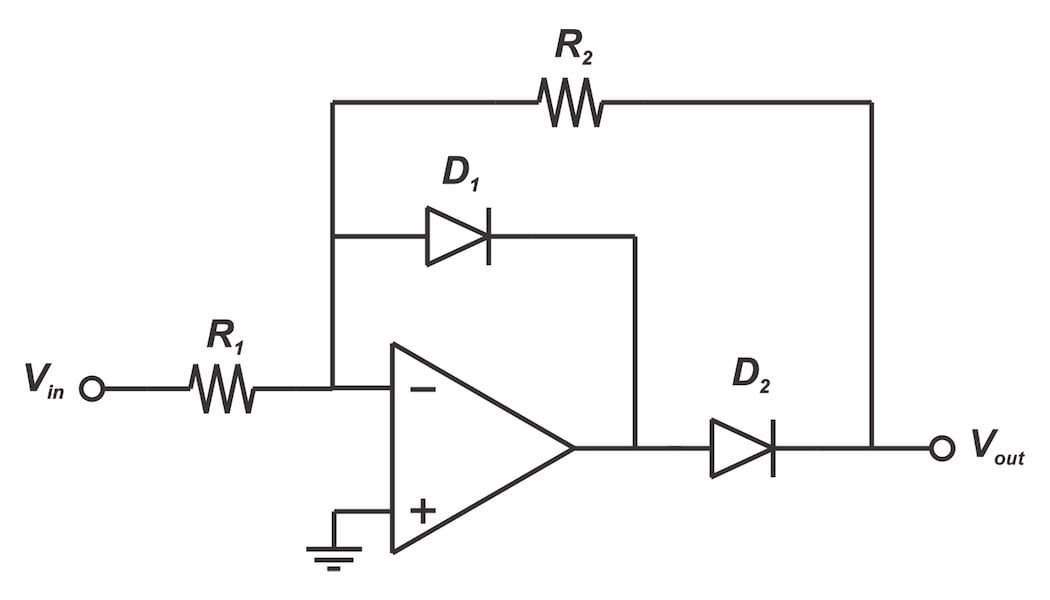
图11
虽然精密整流器可以解决简单二极管整流器的挑战,但它也有其自身的局限性,例如噪声抑制很小。 在下一篇文章中,我们将更详细地研究该电路,并讨论LVDT应用的同步解调器。
-
LVDT解调器电路的基础知识2023-05-25 6783
-
LVDT解调:整流器型与同步解调2023-01-27 6381
-
解调器2014-04-30 3031
-
伴音解调器电路图2009-03-28 990
-
8CA解调器电路2009-03-21 1154
-
正交解调器电路图2009-03-20 1844
-
FM解调器电路2008-04-21 2297
全部0条评论

快来发表一下你的评论吧 !
