

数字电源排序设计选择如何影响设计过程后期的灵活性
描述
电源排序是数字电源架构的关键组件。在这篇文章中,我们将介绍几种构建排序的方法及其后果。特别是,我们将看到设计选择如何影响设计过程后期的灵活性。
电源转换的构建模块
让我们来看看我们的电源构建块和工具,看看我们可以为自己制造什么样的麻烦。为了简单起见,让我们假设我们有一个通用电源模块(UPB),以及所有常见的罪魁祸首,如FPGA和微控制器以及逻辑。我们的UPB有一个简单的界面:

图1.电源块
我们简单的电源转换器具有单V在/V外、一个 PMBus 接口、一个输入信号:控制,以及两个输出信号:电源良好和故障/。
控制
控制信号打开和关闭输出。它是高电平有效,具有内部上拉。
电源良好
当输出通电时,电源良好信号为高电平,并且在有效范围内。
故障/
FAULT/信号为低电平有效,漏极开路,并在电源模块发生故障时置位。如果存在故障,则断言 ALERT/,并且可以通过 PMBus 读取故障。并非所有电源转换器都会同时具有电源良好和故障/,我们不需要两者。在几乎所有情况下,FAULT/都可以成为POWER GOOD的特技替身。
设计一
现在让我们构建一些东西,这样我们就可以拆除它并构建另一个,每次都变得更好。
假设我们有一个带有中间总线控制器 (IBC) 和以下导轨的系统:
785
295
5.0V
3.3V
1.2V
0.8V
我们决定将轨道构建为层次结构。但是,我们需要不同的上电控制结构。
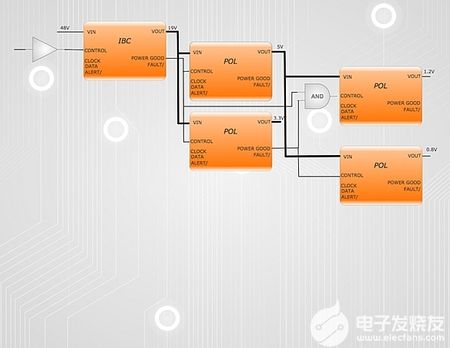
图2.简单的电源结构
不要担心权力层次结构是否正确,或者逻辑对于任何实际设计是否正确。重要的是这种“类型”结构的影响。让我们考虑一下这样做的利弊。
在专业方面,这很简单,无论是在概念上还是在实现上。使用 FPGA 或 uP 的 GPIO 添加 LED 指示灯或读取电源良好非常容易。如果出现问题,电源良好会让系统知道轨道出现故障。
在缺点方面,如果发生故障,并且系统必须关闭所有电源,则别无选择,只能按照上电的顺序关闭它们。这意味着大多数下游电源轨将因断电而不是控制引脚而断电。
没有时序控制,因此必须添加额外的电路以在电源轨之间产生延迟。如果在电源轨之间添加了延迟,则该延迟仅适用于通电,因为在断电时,馈线导轨上的断电将在 POWER GOOD 将其断开之前将其从属电源轨断开。
如果你对这种“类型”的结构犯了任何错误, PCB将需要重新布局, 当你在等待的时候, 你别无选择,只能在你的设计上破解电线, 或者去喝一个很长的咖啡休息时间.
设计二
如果我们集中逻辑,我们可以做得更好。可编程器件(如FPGA或uP)可以管理所有逻辑。
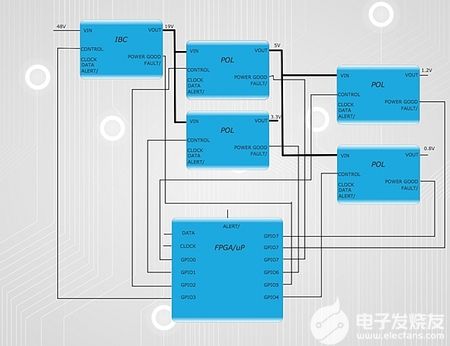
带控制器的电源结构
由于所有逻辑线都路由到 GPIO,控制器可以完全控制排序顺序(打开和关闭),并完全控制时序。只要愿意更改Verilog或C代码,就可以更改它。我已经在控制器上指示了 PMBus,但没有绘制所有连接,但使用 PMBus,控制器现在还可以控制电平和故障行为。
在专业方面,这种设计很灵活,你不会被困住。如果在控制结构中出错,可以在不重新布局的情况下修复它。
在缺点方面,您必须更改Verilog或C,并可能重新测试和重新鉴定固件。这种设计还需要大量的路由。每个 POL 需要 5 条控制线,它们分别路由到控制器。假设我们有一个 20 个轨道系统,考虑到 PMBus,它需要 42 个 GPIO 引脚。
所以这种设计是灵活的,但需要大量的GPIO和大量的PCB空间。
设计三
当与 PMBus 和智能数字电源 POL 结合使用时,我们可以通过使用开漏控制的特性来简化控制器。
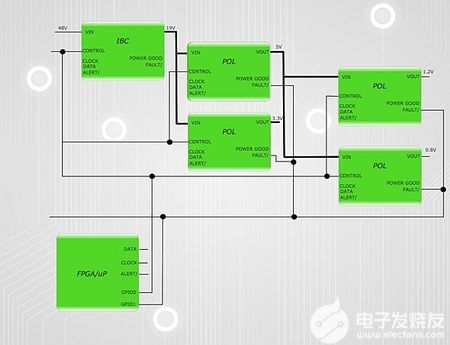
简化的控制器
所有控制引脚都连接在一起,所有故障/引脚连接在一起。这意味着一个 20 个轨道系统只需要 5 个连接。IO 引脚数量减少了 8 倍。
让我们看看这是如何工作的。控制引脚为高电平有效。它由 GPIO0 控制,GPIO0 设置为“漏极开路”。由于控制引脚为漏极开路,这意味着POL也可以将其拉低。
当POL复位时,它将控制引脚拉低,直到它准备好响应外部信号。这意味着,如果控制器速度太快,则在全部正确复位之前,所有 POL 都不会打开,最慢的 POL 复位确定系统何时通电。如果控制器速度较慢,则在释放控制线时控制电源启动。
您可能想知道排序。我们是否失去了对它的控制?否,因为 PMBus 具有TON_DELAY命令,其值通常存储在 POL 的 NVM 中。它可以由控制器设置,也可以使用外部工具存储在 NVM 中。
故障/引脚也是漏极开路,由GPIO1控制,它们既是输入又是输出。这意味着当任何电源轨发生故障时,当FAULT引脚被拉低时,所有电源轨都会得到通知。此外,当故障/被拉低时,警报/断言。因此,控制器知道存在故障。每个人都知道,这是这个设计的关键。
现在,您可以选择几个有关故障处理的选项。PMBus 可以使用警报响应地址 (ARA) 响应 ALERT/,该地址获取具有故障的所有 POL 的地址,然后查询每个 POL 以获取故障信息。然后,它可以使用决策树,并根据需要以任何顺序关闭轨道。或者它可以一次关闭所有电源轨,让PMBus TOFF_DELAY管理时序。
许多POL具有增强的故障管理功能,可以直接响应故障(请记住,FAULT/也是一个输入)。典型的响应是:
重试
立即关闭
斜坡关闭
当POL具有这些高级功能时,它减轻了Verilog或C代码的负担,因为POL可以使用外部工具(通过PMBus和外部接口和软件)进行编程。此外,当使用FAULT/引脚时,对故障的响应比处理ALERT/的响应要快得多。
设计三的权衡
如果您有增强的 POL,则可以进行权衡。如果故障逻辑对于共享故障/线路来说太复杂,只需添加一个控制器。如果故障逻辑很简单,则可以使用工具配置故障行为,而无需控制器。或者,您可以使用控制器进行遥测和其他功能,但使用 FAULT/ 引脚进行故障处理,如果您发现它无法处理所有情况,您可以随时添加用于故障处理的代码并进行更改。
控制引脚也有类似的权衡。您也可以使用 PMBus 来代替它。在这种情况下,CONTROL引脚仍会保持导通状态,直到所有POL完成复位。
当控制引脚和故障引脚共享时,最大的灵活性,并且PMBus有一个控制器。通过这种设计, PCB制造后具有完全的灵活性.
电源良好
如果你没有注意到,我没有使用电源好。在打开另一个轨道之前,您不需要知道一条轨道何时良好。如果一个轨道都由TON_DELAY控制,而a没有及时准备好,就会出现故障。PMBus 定义了TON_MAX_FAULT_LIMIT,它定义了钢轨必须爬坡并在公差范围内的时间。如果此时某个导轨不在规格范围内,则会发生故障,这将阻止其他导轨打开。
设计原则是:没有消息就是好消息。如果系统需要知道所有电源轨何时启动,您只需要一个简单的计时器,设置为所有TON_DELAYs定义的最长时间。或者,控制器可以对最后一个 POL 的状态等进行 PMBus 查询。
在某些器件中,故障/引脚可以重新配置为电源良好引脚。这允许您在确实需要时拥有电源良好,但故障共享引脚丢失。因此,您可能需要控制器来响应警报/。或者在更简单的系统中,ALERT/可以抓住控制引脚并在出现故障时关闭所有电源轨。
在实践中,电源良好通常不是必需的。但是,如果您真的想要一个,您通常可以重新配置 FAULT/。毕竟,总有特殊情况。也许总有空间容纳“通用适配器套件”。
审核编辑:郭婷
-
超声设计考虑及灵活性实现2011-05-18 1814
-
实现汽车测功器应用的灵活性2009-10-06 3765
-
电源系统设计中灵活性和可配置性的好处2017-04-07 4084
-
多轨电源设计的排序2019-07-24 1347
-
EVAL-PRAOPAMP-2RMZ,为不同的应用电路和配置提供多种选择和广泛的灵活性2019-11-01 2794
-
EVAL-PRAOPAMP-4RZ,为不同的应用电路和配置提供多种选择和广泛的灵活性2019-11-04 1949
-
如何去提高电源管理的灵活性?2021-04-23 1617
-
开放式FPGA能否增加测试的灵活性?2021-05-11 1230
-
嵌入式Linux的灵活性2021-11-04 1326
-
集成与灵活性是通往最佳电源管理架构之路2009-12-10 1037
-
弹性块存储的灵活性怎么样2020-03-21 1592
-
如何解决多源数据融合分析过程灵活性差和处理效率低的问题方法说明2020-07-31 1890
-
康瑞电子讲解连接器的设计具备灵活性是关键!2022-12-28 659
-
慧能泰HP1010A:高灵活性数字图腾柱PFC控制器的卓越之选2026-03-27 389
-
Exar PowerXR数字电源解决方案:高效、灵活的电源设计新选择2026-04-28 299
全部0条评论

快来发表一下你的评论吧 !
