

 “看门狗”VS“打狗棒”,谁胜谁负?(CW32篇)——MCU抗干扰实验系列专题(4)
“看门狗”VS“打狗棒”,谁胜谁负?(CW32篇)——MCU抗干扰实验系列专题(4)
电子说
描述
上一期文章,我们讲了基于STM32的抗干扰方法:增加硬件失效时软件复位及看门狗功能。这期我们将介绍基于CW32 的抗干扰问题。
在1、2期文章和视频中(可进入”MCU研究实验室”公众号查看原文),为了公平起见,所有的MCU使用的是同一个工程程序,(不同的MCU,时钟和GPIO的配置略有不同,使用宏定义区分MCU),除了使用滴答时钟和基本GPIO操作外,没有任何抗干扰手段,全靠MCU内部自身的抗干扰能力进行的测试。结果,只有芯源CW32 MCU没有彻底死机外,其它均有死机现象。
这种死机现象,在我们实际开发产品时,是禁止发生的。为了对付这种干扰,除了硬件上有些技术对策,那软件上又有些什么呢?
当然是我们最熟悉的看门狗了。“看门狗”这个神器在“古老的年代”51时期,那是没有的,需要在外面加一个“昂贵”的芯片来实现。当然,现在新时代,所有的ARM MCU基本上都标配了看门狗外设。
CW32在抗干扰测试时,也偶有自身复位现象。当然如果我们增加了看门狗抗干扰技术,那设计出来的产品不是更稳定吗!
看门狗是啥呢,我们来看一下,CW32芯片的用户手册,关于看门狗的介绍。
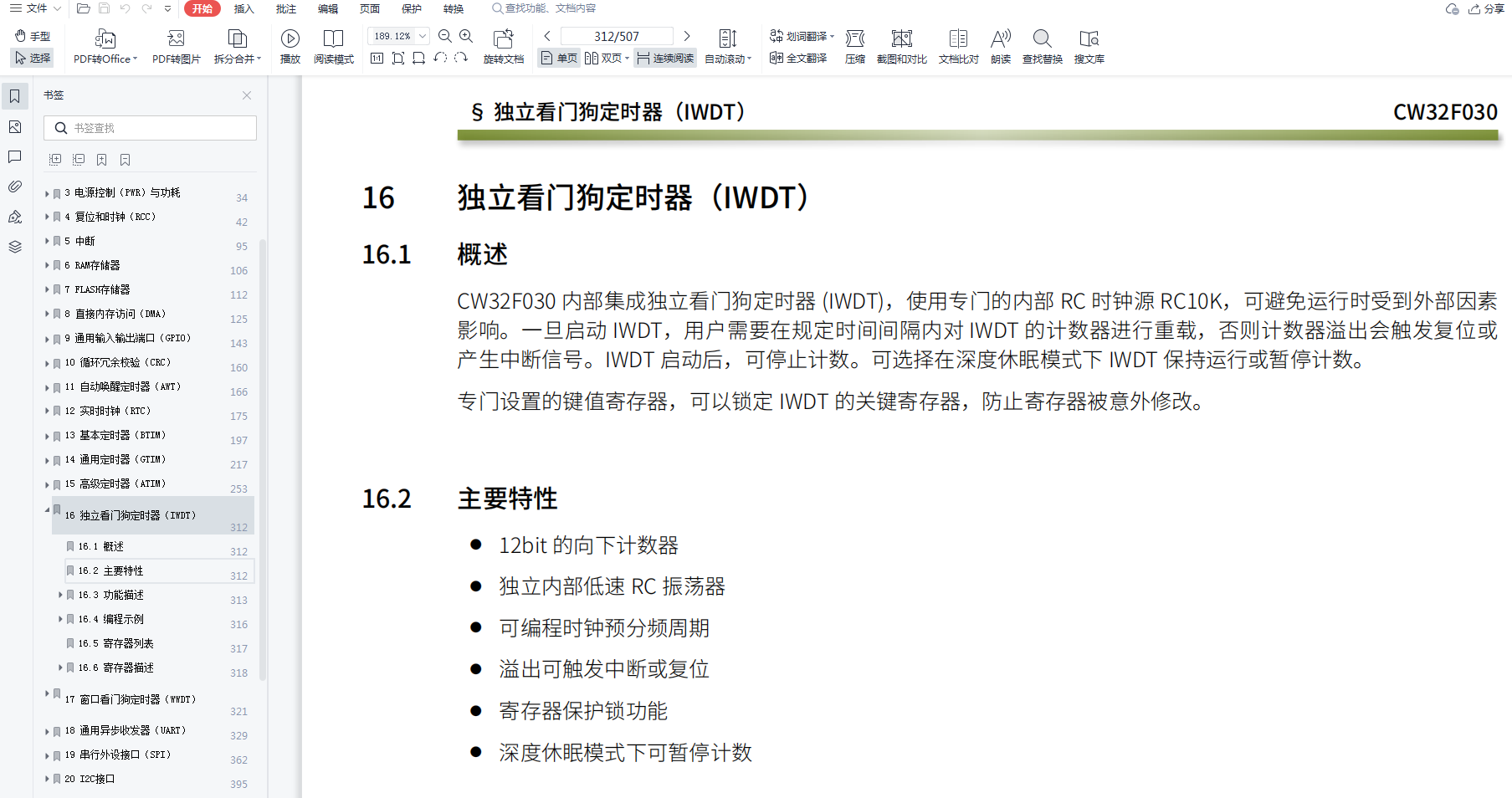
这里我们就不详细展开其内容了。直接来看核心代码:
//系统时钟配置为48M HSI倍数
#include "main.h"
#include "cw32f030_gpio.h"
//GPIOA端口
#define SEGA GPIO_PIN_10
#define SEGB GPIO_PIN_9
#define SEGC GPIO_PIN_8
//GPIOB端口
#define SEGD GPIO_PIN_14
#define SEGE GPIO_PIN_15
//GPIOA端口
#define SEGF GPIO_PIN_11
#define SEGG GPIO_PIN_12
//GPIOB端口
#define SEGDP GPIO_PIN_13
//num:需要显示的数字,no:0显示左边数码管,1显示右边数码管
void SEG_DisplayNum(unsigned int num, unsigned int no)
{
GPIO_WritePin(CW_GPIOA,0xffff,GPIO_Pin_RESET);//关段码、位码
GPIO_WritePin(CW_GPIOB,0xffff,GPIO_Pin_RESET);//
switch(num) //开断码
{
case 0: //ABCDEF
GPIO_WritePin(CW_GPIOA,SEGA|SEGB|SEGC|SEGF,GPIO_Pin_SET);
GPIO_WritePin(CW_GPIOB,SEGD|SEGE,GPIO_Pin_SET);
break;
case 1: //BC
GPIO_WritePin(CW_GPIOA,SEGB|SEGC,GPIO_Pin_SET);
break;
case 2: //ABDEG
GPIO_WritePin(CW_GPIOA,SEGA|SEGB|SEGG,GPIO_Pin_SET);
GPIO_WritePin(CW_GPIOB,SEGD|SEGE,GPIO_Pin_SET);
break;
case 3: //ABCDG
GPIO_WritePin(CW_GPIOA,SEGA|SEGB|SEGC|SEGG,GPIO_Pin_SET);
GPIO_WritePin(CW_GPIOB,SEGD,GPIO_Pin_SET);
break;
case 4://BCFG
GPIO_WritePin(CW_GPIOA,SEGF|SEGB|SEGC|SEGG,GPIO_Pin_SET);
break;
case 5://ACDFG
GPIO_WritePin(CW_GPIOA,SEGA|SEGC|SEGG|SEGF,GPIO_Pin_SET);
GPIO_WritePin(CW_GPIOB,SEGD,GPIO_Pin_SET);
break;
case 6: //ACDEFG
GPIO_WritePin(CW_GPIOA,SEGA|SEGC|SEGG|SEGF,GPIO_Pin_SET);
GPIO_WritePin(CW_GPIOB,SEGD|SEGE,GPIO_Pin_SET);
break;
case 7: //ABC
GPIO_WritePin(CW_GPIOA,SEGA|SEGB|SEGC,GPIO_Pin_SET);
break;
case 8: //ABCDEFG
GPIO_WritePin(CW_GPIOA,SEGA|SEGB|SEGC|SEGG|SEGF,GPIO_Pin_SET);
GPIO_WritePin(CW_GPIOB,SEGD|SEGE,GPIO_Pin_SET);
break;
case 9: //ABCDFG
GPIO_WritePin(CW_GPIOA,SEGA|SEGB|SEGC|SEGG|SEGF,GPIO_Pin_SET);
GPIO_WritePin(CW_GPIOB,SEGD,GPIO_Pin_SET);
break;
case 10: //DP 显示DP
GPIO_WritePin(CW_GPIOB,SEGDP,GPIO_Pin_SET);
break;
default:
break;
}
if(no==1)
PB12_SETHIGH();//开位码
else
PB11_SETHIGH();//开位码
}
void RCC_Configuration(void)
{
/* 0. HSI使能并校准 */
RCC_HSI_Enable(RCC_HSIOSC_DIV6);
/* 1. 设置HCLK和PCLK的分频系数 */
RCC_HCLKPRS_Config(RCC_HCLK_DIV1);
RCC_PCLKPRS_Config(RCC_PCLK_DIV1);
/* 2. 使能PLL,通过PLL倍频到64MHz */
RCC_PLL_Enable(RCC_PLLSOURCE_HSI, 8000000, 6); // HSI 默认输出频率8MHz
__RCC_FLASH_CLK_ENABLE();
FLASH_SetLatency(FLASH_Latency_3);
/* 3. 时钟切换到PLL */
RCC_SysClk_Switch(RCC_SYSCLKSRC_PLL);
RCC_SystemCoreClockUpdate(48000000);
}
void GPIOInit(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
__RCC_GPIOB_CLK_ENABLE();
__RCC_GPIOA_CLK_ENABLE();
//数码管断码位码 IO初始化
GPIO_InitStruct.IT = GPIO_IT_NONE; //LED1
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pins = GPIO_PIN_8|GPIO_PIN_9|GPIO_PIN_10|GPIO_PIN_11|GPIO_PIN_12;
GPIO_InitStruct.Speed = GPIO_SPEED_HIGH;
GPIO_Init(CW_GPIOA, &GPIO_InitStruct);
GPIO_InitStruct.Pins = GPIO_PIN_11|GPIO_PIN_12|GPIO_PIN_13|GPIO_PIN_14|GPIO_PIN_15;
GPIO_Init(CW_GPIOB, &GPIO_InitStruct);
}
int main()
{
unsigned long i;
unsigned int num=0;
IWDT_InitTypeDef IWDT_InitStruct = {0};
for(i=0;i<60000;i++); //上电延时
RCC_Configuration(); //时钟配置
GPIOInit(); //数码管GPIO初始化
//使用独立看门狗功能
CW_SYSCTRL->APBEN1_f.IWDT = 1U; //使能IWDT模块
IWDT_InitStruct.IWDT_ITState = ENABLE;
IWDT_InitStruct.IWDT_OverFlowAction = IWDT_OVERFLOW_ACTION_INT; //溢出后产生中断不复位
IWDT_InitStruct.IWDT_Pause = IWDT_SLEEP_PAUSE;
IWDT_InitStruct.IWDT_Prescaler = IWDT_Prescaler_DIV4;
IWDT_InitStruct.IWDT_ReloadValue = (IWDT_FREQ >> 2) / 1000 * 280 - 1; // 由于IWDT的时钟为RC10K, 设置为280实际溢出时间为256ms左右
IWDT_InitStruct.IWDT_WindowValue = 0xFFF;
IWDT_Init(&IWDT_InitStruct);
IWDT_Cmd();
__disable_irq();
NVIC_EnableIRQ(WDT_IRQn);
__enable_irq();
while(1)
{
num++; //一个循环,数据加1
if(num>=100)num=0; //限数0-99
SEG_DisplayNum(num/10,0); //显示数据十位
for(i=0;i<60000;i++); //延时
SEG_DisplayNum(num%10,1); //显示数据个位
for(i=0;i<60000;i++); //延时
IWDT_Refresh(); //喂狗
SEG_DisplayNum(num/10,0); //显示数据十位
for(i=0;i<60000;i++); //延时
IWDT_Refresh(); //喂狗
SEG_DisplayNum(num%10,1); //显示数据个位
for(i=0;i<60000;i++); //延时
SEG_DisplayNum(num/10,0); //显示数据十位
for(i=0;i<60000;i++); //延时
IWDT_Refresh(); //喂狗
SEG_DisplayNum(num%10,1); //显示数据个位
for(i=0;i<60000;i++); //延时
IWDT_Refresh(); //喂狗
}
}
//CW32看门狗中断函数
void WDT_IRQHandler(void)
{
unsigned int j;
if(CW_IWDT->SR & IWDT_SR_OV_Msk)
{ //独立看门狗溢出发生
IWDT_ClearOVFlag(); /*清除标志 */
while (1)
{
SEG_DisplayNum(10,1); //显示右测数码管的小数点位
for(j=0;j<60000;j++);
for(j=0;j<60000;j++);
for(j=0;j<60000;j++);
for(j=0;j<60000;j++);
for(j=0;j<60000;j++);
for(j=0;j<60000;j++);
__NVIC_SystemReset(); //软件复位,系统重新运行。
}
}
}
这里的代码与1、2期代码不同,我们使用官方标准库来重新编写。其中数码管的动态扫描没有使用滴答时钟,而是在主程序中直接用延时来完成。区别于之前的代码,我们增加了独立看门狗的功能。看门狗的喂狗操作在MAIN函数的大循环里,数码管的动态扫描中实现。
当程序发生死机时,MAIN函数的大循环将暂停运行,数码管随机显示最近一次数值,不进行动态扫描,所以,只有一位数码管显示。同时,喂狗暂停。
看门狗的代码配置为产生中断不复位。与STM32不同,看门狗可以停止复位,先进中断。因此,当看门狗时间到,进入看门狗中断函数WDT_IRQHandler()中,在中断函数中,将右则数码管小数点显示出来,并进行软件复位。这样通过小数点显示再判断看门狗事件的发生。
除了看门狗复位,还有一种软件复位方式。当MCU发生硬件失效时,会进入Hardfault中数函数。Hardfault是优先级别为-1的固定类型中断,无需初始化设置。常常在MCU死机时,不知明的会进入Hardfault中断。因此,在Hardfault中断函数中,添加软件复位功能也是一种防死机现象的方法。
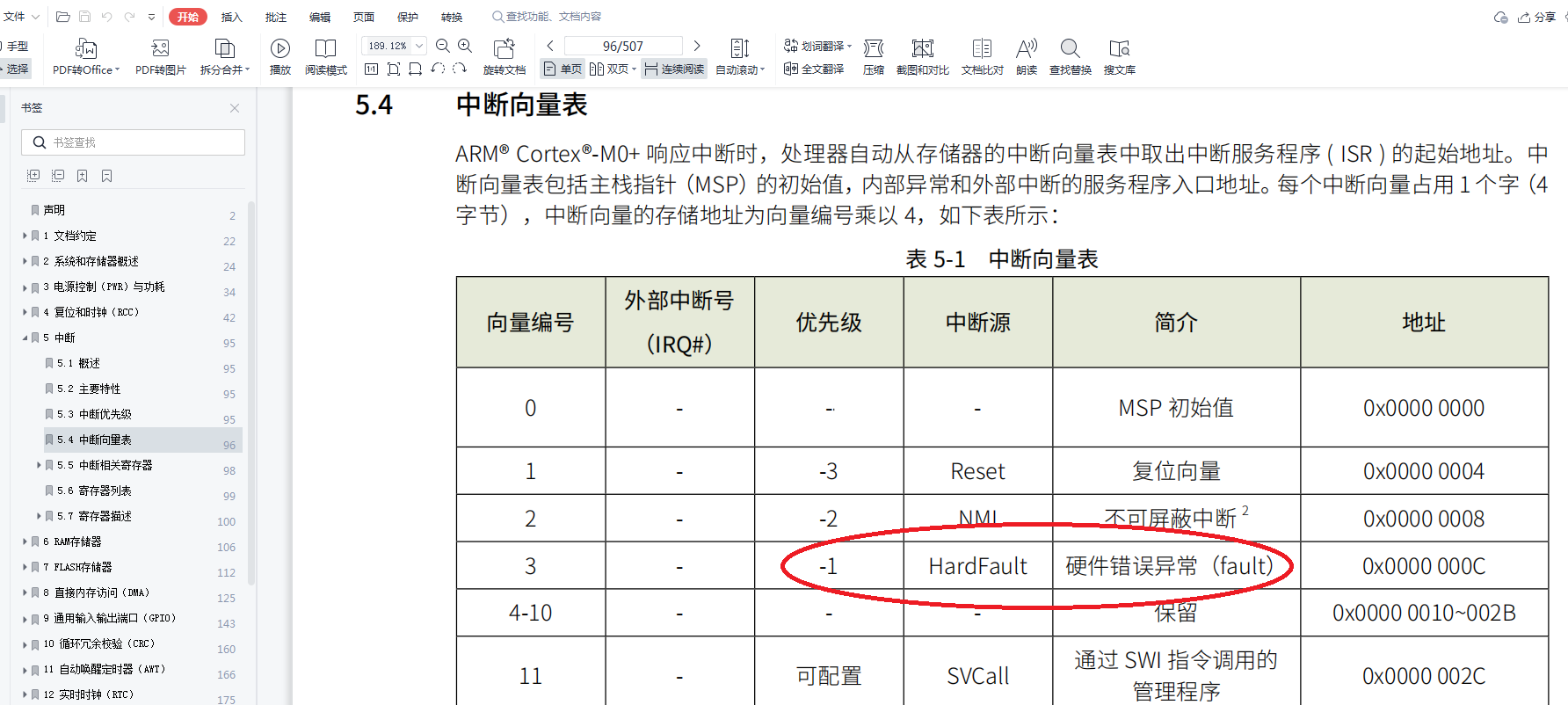
Hardfault中断函数中代码如下:
void HardFault_Handler(void)
{
/* USER CODE BEGIN HardFault_IRQn */
unsigned int j;
/* USER CODE END HardFault_IRQn */
while (1)
{
/* USER CODE BEGIN W1_HardFault_IRQn */
while (1)
{
SEG_DisplayNum(10,0);
for(j=0;j<60000;j++);
for(j=0;j<60000;j++);
for(j=0;j<60000;j++);
for(j=0;j<60000;j++);
for(j=0;j<60000;j++);
for(j=0;j<60000;j++);
__NVIC_SystemReset();
}
/* USER CODE END W1_HardFault_IRQn */
}
}
34这就是CW32关于看门狗的一个介绍。
CW32芯片本身在内部设计的时候充分考虑了各种ESD抗干扰手段,所以即使软件上不加任何软件抗干扰处理,它自身已经有比较强的抗干扰能力了。然后,所以我们做实验的结果,没有STM32那么明显,就是加看门狗和不加看门狗都没那么明显,它本身就可以扛得住各种干扰了。
但是,一个规范性的程序,一个可靠性的软硬设计都非常重要。建议用户在产品开发的时候,还是应该把看门狗功能加上去。因为外面可能有雷击,有各种电网的波动,各种意外。那么当意外发生的时候,MCU不能死机,但可以复位,可以重新运行,不能死锁。所以我们要养成良好的编程习惯,养成良好的产品设计思维,要把我们抗干扰这个手段加上去,这也是我们给大家一直来做这个抗干扰实验的一个目的和意义所在。
审核编辑:汤梓红
-
 jf_97050365
2023-03-10
0 回复 举报芯源CW32 MCU抗干扰 收起回复
jf_97050365
2023-03-10
0 回复 举报芯源CW32 MCU抗干扰 收起回复
-
 jf_01001934
2023-03-09
0 回复 举报软件复位也经常用,成本低这个是重点 收起回复
jf_01001934
2023-03-09
0 回复 举报软件复位也经常用,成本低这个是重点 收起回复
-
MCU硬件看门狗+软件看门狗监测多任务的思路2023-10-24 3027
-
MCU如何集成看门狗的功能2023-06-22 3398
-
关于独立看门狗的一点经验2023-05-09 1264
-
MCU独立看门狗和窗口看门狗的区别2023-03-03 1626
-
STM32中的独立看门狗和窗口看门狗是什么2023-02-20 5158
-
“看门狗“VS“打狗棒”,谁胜谁负?(STM32篇)—MCU抗干扰实验系列专题(3)2023-02-08 2678
-
“看门狗”VS“打狗棒”,谁胜谁负?(CW32篇)——MCU抗干扰实验系列专题(4)# MCU抗干扰MCU研究实验室 2023-01-17
-
STM32中的独立看门狗和窗口看门狗2022-12-22 3559
-
【嵌入式系统】独立看门狗原理+看门狗实验分析2021-11-25 1324
-
对于MCU看门狗IIWDG WWDG喂狗时间的配置参考2021-10-28 993
-
什么是stm32看门狗?独立看门狗和窗口看门狗工作原理解析2017-11-06 28601
全部0条评论

快来发表一下你的评论吧 !
