

传感器性能和限制
描述
传感器性能和限制
为了更好地理解理论和制造的镜头性能之间可能发生的差异,示例1-3显示了在传感器水平上发生的情况,以及如何使用不同的波长和f/#s对传感器的输出进行可视化。数字从理论过渡到现实世界的例子,包括像差和镜头制造误差。如在MTF曲线和镜头性能中注意到的,波长越短,理论上成像系统的性能上限越大。近年来,蓝色LED已成为提高小型像素传感器性能的可靠选择。
Ex.1:在低f/#(理论值)时,光斑尺寸和像素输出随波长的变化
图1A和1B显示了四个不同的波长被完美成像,除了在包含3.45µm像素和f/2.8的传感器中心由衍射引起的模糊(见艾里斑和衍射极限)。这被认为是一个小像素尺寸,它与许多相机公司使用的非常流行的500万像素传感器有关。图1A显示了从470nm(蓝色)到880nm(NIR)波长时光斑尺寸的差异。图1B示出了由图1A中的镜头产生的每个图像的像素输出;注意与较短波长相关的较小斑点。
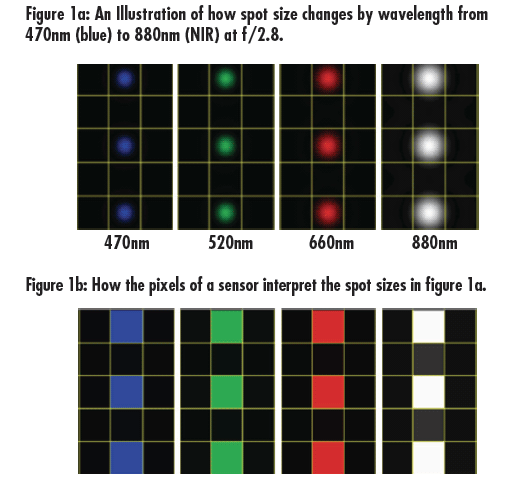
图1:在低f/#时,光斑尺寸和像素输出随波长的变化。
Ex.2:在高f/#(理论)下,光斑尺寸和像素输出随波长的变化
图2中的图像与图1类似,但光圈设置已更改为f/8。图2A显示了所有的点,无论波长如何,都超过了单个像素的大小,导致能量溢出到相邻像素中。图2B示出了在较长波长处的像素输出中的明显模糊,其中在880nm处的点不再能够被分离。这显示了改变f/#的一个影响,即使在理论上完美的系统中。
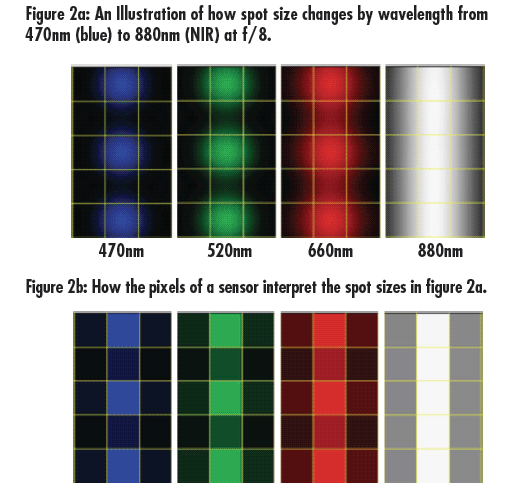
图2:光斑尺寸和像素输出随高f/#波长的变化。
 Ex.3:包括像差的真实镜头中光斑尺寸和像素输出随波长的变化
Ex.3:包括像差的真实镜头中光斑尺寸和像素输出随波长的变化
这个例子是在f/2.8的真实镜头设计的中心和角落更真实。这些数字包括甚至在最高质量的镜头设计中固有的像差,以及与制造公差有关的影响。像差使信息错位并改变所产生的光点的形状,导致光点不是旋转对称的;所涉及的像差的总和产生了这种形状(关于像差的更多信息可以在像差中找到。注意,像差在图像的角落比中心更明显。在图1A和1B中所示的点与图3A和3B中所示的点相比有很大的不同;图1是理论演示,而图3使用的是真实镜头。注意像差如何影响图3C和3D所示图像中的光斑形状。
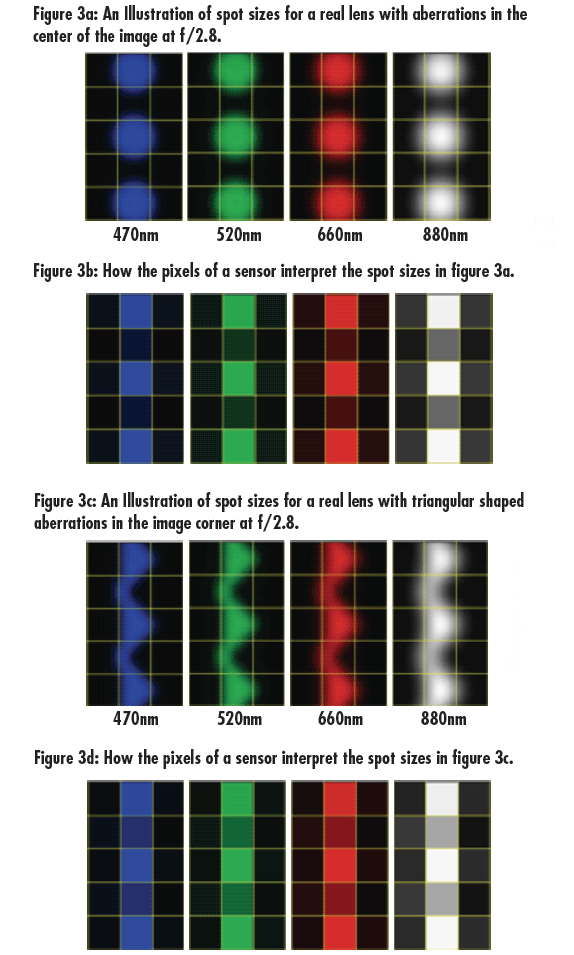
图3:包括像差的真实镜头中光斑尺寸和像素输出随波长的变化。
Ex.4:真实世界的镜头性能。实际图像。
图4是一张应用图,显示了具有相同焦距(16mm)、f/#(f/2.8)和视场(FOV)(100mm,水平)的两个镜头的性能差异。这些图像显示了f/#、调制传递函数(MTF)和波长部分中详细介绍的所有概念。该目标是一个多元素星形目标,允许在所有方向的公共场点中同时显示大范围的频率(分辨率)。有关此目标和其他系统性能基准测试目标的更多详细信息,请参见分辨率和MTF测试。通过检查FOV的特写部分,可以看到性能上的差异。图4显示了由两个镜头成像的完整星体目标;在两个不同镜头之间的比较中,目标的中心、底部中间和角落的突出显示区域是兴趣点。本例中使用了3.45µm像素、总分辨率为5MP的Sony ICX625单色传感器和白光背光照明器。
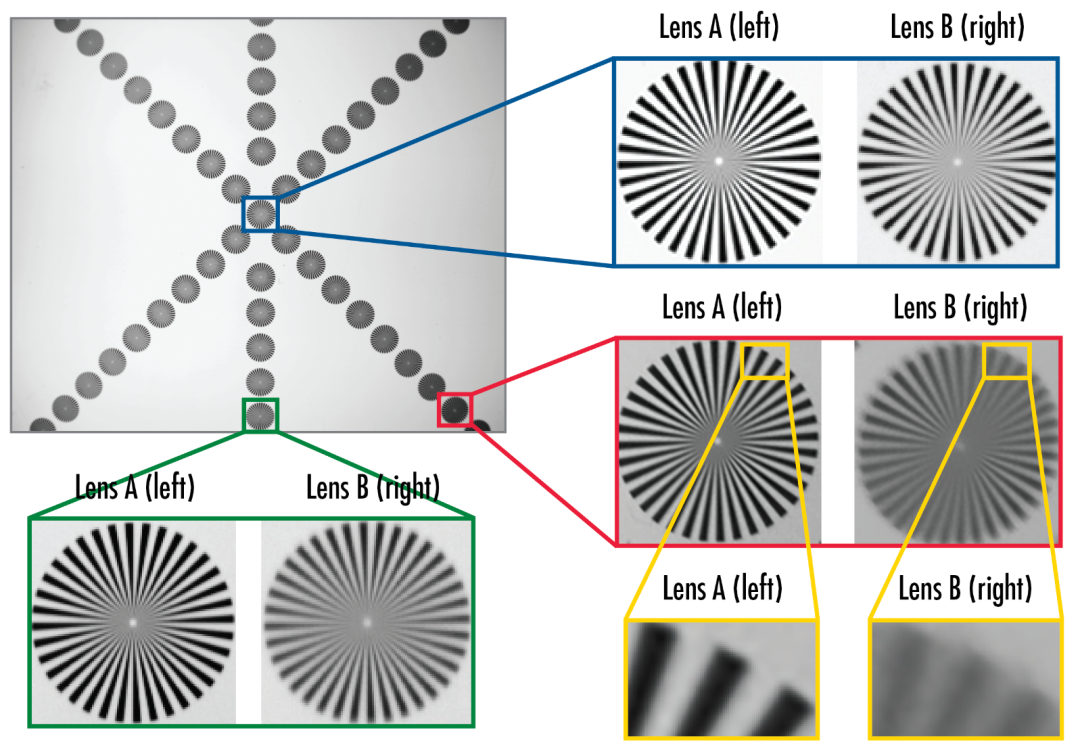
and sensor.
图4:使用焦距、f/#、FOV和传感器相同的两个镜头(A和B)对恒星目标进行成像。
图4所示的比较显示了镜头A的优越性能。图像的角显示出较大的对比度差异;在镜头B的例子中,明显更难以区分黑色和白色。此外,不同像差(主要是散光)的方向性是显著的;可以看到与在径向方向上传播的线相关联的更多细节。
图4中图像角落的特写(黄色框)提出了一个额外的问题,即每个黑白线对总共覆盖大约10个像素。与图像中心的可分辨部分相比,角落的空间分辨率(由于模糊的圆覆盖了多个像素)从中心附近的5MP(2448×2050)降低到角落中的大约500×400像素,这低于VGA传感器(640×480像素)可以再现的分辨率。即使在传感器分辨率降低的情况下,由于设计限制和制造公差,从每个镜头的不同对比度可以看出,一些镜头仍然存在问题。镜头A的黄色框中的对比度水平为45%,镜头B的黄色框中的对比度水平为7%。
-
传感器技术实验:差动变压器性能测试实验#传感器学习电子 2022-11-06
-
传感器性能术语详解2020-03-06 2147
-
常用位移传感器的性能介绍2020-05-07 2993
-
改善传感器性能的办法介绍2020-08-05 2837
-
怎么设计出实用的新型高性能光传感器放大电路?2021-03-08 2083
-
生物传感器系统的性能标准是什么2021-04-30 3786
-
柔性传感器是什么?有什么性能?2021-06-27 3301
-
爆震传感器的性能如何2022-11-21 838
-
如何限制窄液位传感器的视野?2023-01-31 388
-
电阻式传感器性能测试及应用2009-11-15 1127
-
批准国家传感器质量监督检验中心计量认证范围及限制要求2010-12-22 450
-
性能优异的低压传感器2010-12-29 457
-
改善传感器性能的技术途径2010-05-30 5214
-
振动传感器应用电路_四款压电陶瓷振动传感器报警电路2019-10-16 21432
-
高级传感器LTD专门设计和制造高性能霍尔传感器2021-10-20 1056
全部0条评论

快来发表一下你的评论吧 !
