

KUKA机器人的数学标准功能介绍
描述
运算符:
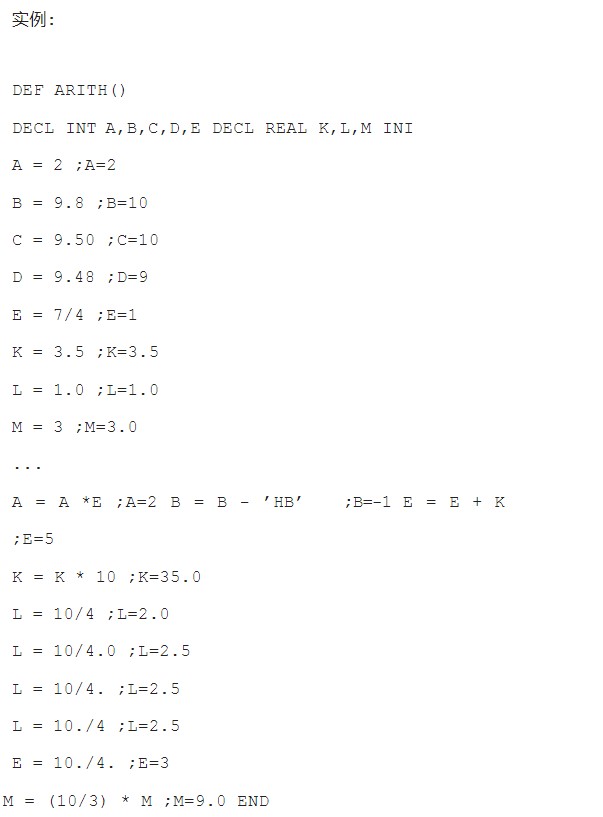
在每次运算时,编译器检查运算数的可靠性。
所有 4 个基本计算种类在 KRL中都允许。
| 运算符 | 说明 |
| + | 加法或正号 |
| - | 减法或负号 |
| * | 乘法 |
| / | 除法 |
算术运算符可以应用到 INT 和 REAL 数据类型上。
| 操作数 | 操作数 | 结果 |
| INT | INT | INT |
| INT | REAL | REAL |
| REAL | REAL | REAL |
如果 INT 除法的结果不是整数,则舍去小数点后位。
实例:
数学标准功能:
| 功能 | 数值范围自变量 | 数值范围结果 |
| ABS(X) 总和 | REAL_MIN…REAL_MAX | 0 … REAL_MAX |
| SQRT(X) 平方根 | 0 … REAL_MAX | 0 … REAL_MAX |
| SIN(X) 正弦 | REAL_MIN…REAL_MAX | -1 … +1 |
| COS(X) 余弦 | REAL_MIN…REAL_MAX | -1 … +1 |
| TAN(X) 正切 | REAL_MIN…REAL_MAX | REAL_MIN…REAL_MAX |
| ACOS(X) 反余弦 | -1 … +1 | 0 … +180 |
| ATAN2(Y,X) 反正切 | REAL_MIN…REAL_MAX | -180 … +180 |
ABS(X)
总和
REAL_MIN…REAL_MAX 0 … REAL_MAX
SQRT(X)
平方根
0 … REAL_MAX 0 … REAL_MAX
SIN(X)
正弦
REAL_MIN…REAL_MAX -1 … +1
COS(X)
余弦
REAL_MIN…REAL_MAX -1 … +1
TAN(X)
正切
REAL_MIN…REAL_MAX REAL_MIN…REAL_MAX
ACOS(X)
反余弦
-1 … +1 0 … +180
ATAN2(Y,X)
反正切
REAL_MIN…REAL_MAX -180 … +180
绝对值 ABS(X) 计算 X 的总和。
示例:
B = -3.4
A = 5*ABS(B) ;A=17.0
平方根 SQRT(X) 计算 X 的平方根。
示例:
A = SQRT(16.0801) ;A=4.01
正弦 SIN(X) 计算角度 X 的正弦。
示例:
余弦 COS(X) 计算角度 X 的余弦。
示例:
A = SIN(30) ;A=0,5
B = 2*COS(45) ;B=1.41421356
正切 TAN(X) 计算角度 X 的正切。
示例:
以下总和的正切无穷:
C = TAN(45) ;C=1.0
±90°
+90° + k*180° (其中 k = ± 整数)
如果尝试一个这样的值,这将导致错误信息。
反余弦 ACOS(X) 是 COS(X) 的反函数。
示例:
A = COS(60) ;A=0.5
B = ACOS(A) ;B=60
反正弦 对于 SIN(X) 的反函数反余弦,没有预定义函数。但是,基于公式 SIN(X) =
COS(90°-X) 可以很容易就计算出反正弦。
示例:
A = SIN(60) ;A=0.8660254
B = 90-ACOS(A) ;B=60
反正切
角度正切的定义是直角三角形的邻边 (X) 除以对边 (Y)。如果两个侧边的长度已知,则可以用反正切计算邻边和斜边之间的角度。
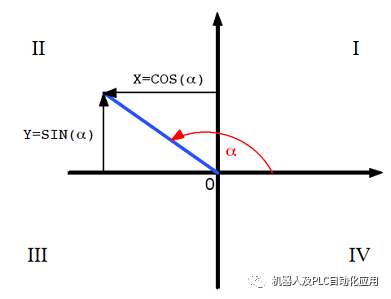
对于全圆,起决定性作用的是 X 和 Y 的正负号是什么。如果只考虑商,则用反正切只能计算 0° 和 180° 之间的角度。
通常,这在袖珍计算器时也是如此:正值的反正切得出一个 0° 和 90° 之间的角度。
负值的反正切得出一个 90° 和 180° 之间的角度。
通过用正负号指定 Y 和 X 明确地确定了位于该角度中的四分之一圆。由此也可以计算四分之一圆 III 和 IV 中的角度。
示例: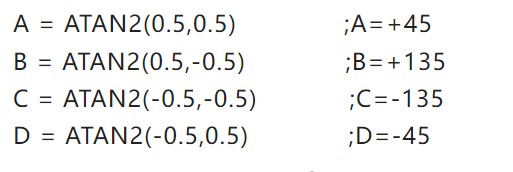
在函数 ATAN(Y,X) 中使用 X 和 Y
审核编辑:刘清
-
LabVIEW的六轴工业机器人运动控制系统2023-12-21 3982
-
KUKA重型机器人2015-02-03 8315
-
求KUKA机器人控制柜三维模型2016-04-18 6458
-
机器人、协作机器人和移动机器人,你分的清楚吗2018-10-30 4129
-
KUKA机器人问题解答2019-07-15 2621
-
库卡KUKA机器人四种启动方式介绍2020-09-04 12392
-
KUKA库卡机器人伺服驱动器相关型号举例2020-09-08 10907
-
KUKA焊接机器人伺服电机常见故障及维修处理2020-09-26 8014
-
工业机器人组成结构相关资料分享2021-07-05 2735
-
库卡机器人MGV电源模块维修2021-09-08 1875
-
KUKA机器人伺服驱动模块维修2021-09-17 1877
-
没有有前辈用LabVIEW控制kuka机器人c2的经验?通讯是怎么做到的?2023-10-21 3886
-
KUKA机器人TCP(工具中心点)设定2015-12-23 2284
-
控制KUKA安全机器人的PLC标准功能块FB 2922020-12-23 4243
-
KUKA机器人固定焊钳的铣削控制2023-04-13 1816
全部0条评论

快来发表一下你的评论吧 !
