

KUKA大众版8.2系统外部轴配置
描述
KUKA大众版8.2系统,配置外部轴需要在项目中进行设置选择KPP1项目用于外部轴1和KPP2使用外部轴2.
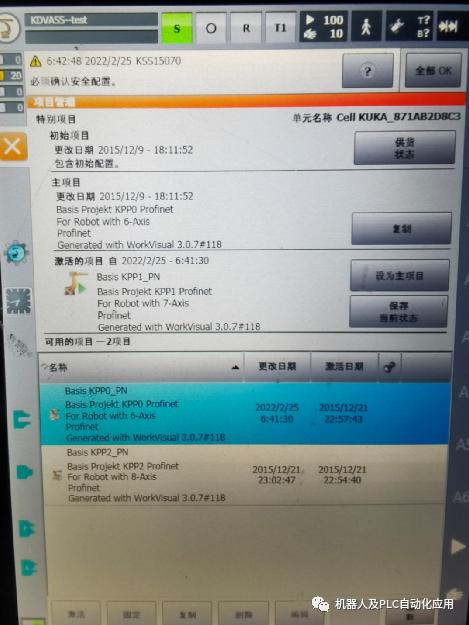
KPP0是标准机器人
KPP1使用1个实际外部轴
KPP2使用2个实际外部轴
1.选择项目KPP1 设置1个外部轴
首选要选择好机械参数.
2.可以使用配置外部轴参数.
3.“InstallLinearUnit130_400V”选择外部轴实用的电机和需要配置的机器人类型.
使用该软件,可以安装或卸载线性单元。注意:如果安装了SynchroMove,则无法使用此附加软件!
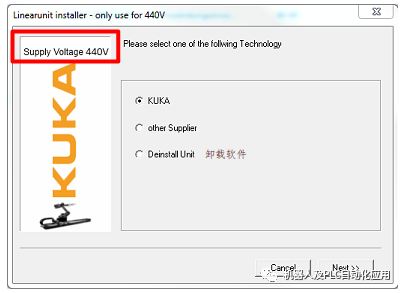
第1步:
选择供应商,或者写在外部轴。
注意正确的电源电压!
400V或440V的不同封装
注意:电源电压不正确的软件可能会损坏组件
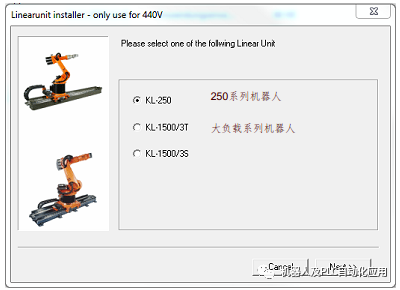
2.选择线性单位
KL-250专用于KR-16机器人可得到
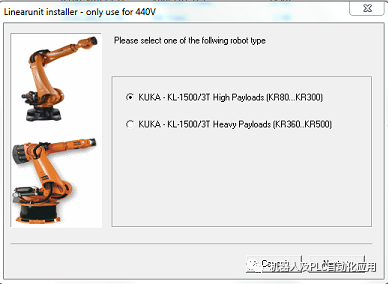
选择机器人类型
单击“下一步”完成安装
完成
负载之间的限制是KR300
4.“LinearUnitConfigurator101 “选择外部轴实用的导轨参数。
线性单位配置器,该软件可用于配置先前安装的线性单元。
注意:该软件只能在安装“安装线性单元”的情况下执行!
第1步:
选择旅行方向
每个KL都有自己的旅行方向
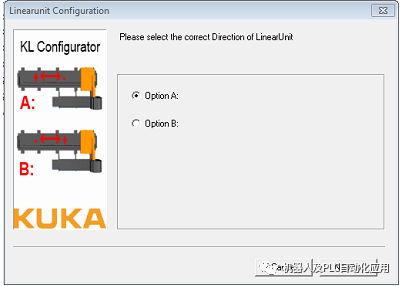
KL 1500/3T Option A
KL 1500/3S Option A
KL 250-3 Option A
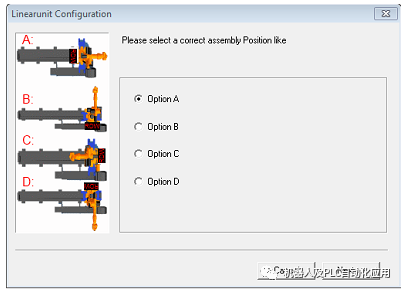
第2步:
选择机器人的安装位置
审核编辑:刘清
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
大众版KUKA程序的区别2023-07-07 2420
-
KUKA大众标准与标准版机器人程序的不同2023-06-08 5136
-
KUKA8.2系统下C4机器人虚拟外部轴E1的设置深层分析2022-11-29 2793
-
简述KUKA外部轴的几种应用2022-11-25 1387
-
ABB机器人添加外部轴(导轨)2022-11-12 5085
-
浅析KUKA机器人气伺服焊钳虚拟外部轴的配置文件2022-11-10 2092
-
大众版KUKA程序的轨迹程序分解2022-07-08 4837
-
简单介绍KUKA外部轴应用2020-10-27 3435
-
KUKA库卡机器人伺服驱动器相关型号举例2020-09-08 10960
-
大众USER(技术包)的整体调用和结构!2020-08-07 3660
-
星际多媒体信息发布软件 大众版 V3.102大众版 V3.12010-10-08 690
-
星际多媒体信息发布系统 大众版 V3.102大众版 V3.12010-08-26 467
全部0条评论

快来发表一下你的评论吧 !
